

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного хозяйства...
Интересное:
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Соревновательных упражнений в тяжелоатлетических видах спорта
Техника выполнения
Тяжелоатлетических
упражнений [9]
9.1.1. Основные понятия
В тяжелоатлетическом спорте одна из основных задач заключается в том, чтобы постепенно подготовить спортсмена для выполнения соревновательных упражнений в рывке и толчке с таким весом штанги, который является максимальным для данного состояния организма тренирующегося. Фактором, создающим условие для решения этой задачи, является рациональная спортивная техника. Под рациональной спортивной техникой понимается совокупность наиболее целесообразных действий как намеренно, так и непроизвольно совершаемых спортсменом (без нарушения правил соревнований), с помощью которых при подъеме штанги максимального веса он наиболее эффективно использует свои физические, функциональные и психические возможности.
Техника подъема тяжестей относится к произвольным (волевым) действиям человека. Однако в технической структуре упражнений наблюдаются и действия, выполняемые атлетом непреднамеренно. Это происходит в силу разных биомеханических причин. В числе неосознанных (непроизвольных), но весьма эффективных действий в спортивной технике имеются фазы и элементы. Так, например, подведение коленей в рывке и толчке не контролируется сознанием; приближение к туловищу опущенных вниз прямых ненапряженных рук (а следовательно, и штанги) в процессе фазы предварительного разгона и их перемещение в противоположном направлении в подрыве (обеспечивающие S-образную траекторию подъема снаряда) в данном случае также не воспринимаются сознанием спортсмена, так как являются следствием напряжения и расслабления определенных групп мышц, движения отдельных звеньев тела, т.е. конечным итогом непреднамеренных действий.
Поднимать тяжести необходимо научиться с разным и постоянно увеличивающимся весом. Только при этом условии в процессе спортивной тренировки происходит повышение уровня развития физических качеств и совершенствование в технике выполнения упражнений до полного автоматизма. На чем основаны данные утверждения?
1. Двигательный навык в силовых видах спорта, где спортивные достижения связаны с подъемом тяжестей, можно квалифицировать как автоматизированный способ выполнения упражнения. Вследствие того, что любое действие связано с проявлением физических качеств (а в упражнениях со штангой, в первую очередь, с силой, быстротой и гибкостью), управление движениями, осуществляемое на основе прочно закрепленного навыка, должно изменяться по мере развития двигательных способностей. Таким образом, с одной стороны, от степени автоматизации двигательного навыка зависит в той или иной мере качественное проявление двигательной деятельности; но с другой стороны - уровень развития этих качеств влияет на способ выполнения упражнения, на его спортивную технику.
2. Как известно, в процессе спортивной тренировки атлет готовится к выполнению упражнения со штангой все более значительного веса. Проведенные исследования говорят о том, что при увеличении веса снаряда у квалифицированных спортсменов изменяются многие кинематические, ритмические и динамические характеристики движений.
3. В условиях соревнований, когда атлет поднимает вес отягощения, значительно превышающий тренировочный, происходит экстраполяция управления движений в новой структуре. Экстраполяция — это способность нервной системы на основании имеющегося опыта адекватно решать вновь возникающие двигательные задачи. Благодаря этому организм спортсмена осваивает определенное число вариантов навыков при подъеме штанги разного веса, приобретает способность правильно выполнять упражнение с более значительным отягощением. Следует знать, что при однообразном повторении выполнения двигательного действия (например, повторного упражнения с одним и тем же весом штанги), возможности к экстраполированию суживаются, при разнообразном их выполнении - расширяются.
Анализ техники выполнения упражнений будет рассматриваться с учетом вышеизложенных особенностей.
Несмотря на имеющееся в природе разнообразие воздействий тел друг на друга, науке известны в настоящее время всего четыре вида сил. Это силы гравитации, электромагнитные силы, ядерные силы и так называемые слабые взаимодействия. Каждый вид сил отличается характерными свойствами и имеет свою сферу действия. Гравитационные силы обусловливают взаимное притяжение тел. Эти силы обладают поразительным свойством сообщать всем телам независимо от их массы одинаковое ускорение. Вес штанги определяется ее массой и сообщаемым гравитационной силой земли ускорением:
Р = mg.
Электромагнитные силы возникают между частицами, имеющими электрические заряды. Они действуют в атомах и молекулах всех веществ, в том числе в живых организмах. Сила мышц человека также имеет электромагнитную природу.
Механика рассматривает только силы гравитационные и электромагнитные.
В механике под силой понимают количественную меру механического взаимодействия тел, в результате которого они могут сообщать друг другу ускорения.
Сила F при подъеме штанги вычисляется согласно второму закону Ньютона по формуле:
F = Р + ша,
где Р - вес штанги, т - масса, а - ускорение.
Масса является основной динамической характеристикой тела - количественной мерой его инертности, т. е. способности тела приобретать то или иное ускорение под действием данной силы.
В системе СИ за единицу массы - один килограмм (1 кг) - принята масса эталонной гири из сплава платины с иридием, которая хранится в Международном бюро мер и весов в Париже.
За единицу силы в системе СИ принята сила, которая сообщает массе в 1 кг ускорение 1 м/сек2. Эта сила называется ньютоном (сокращенно - н). В системе МКГСС за единицу силы принят 1 кг. 1 кг = 9,8 н.
Работа. Работой А в механике называют величину, равную произведению действующей силы F на путь тела S в направлении силы: А = FS.
Если направления силы и пути не совпадают, то А — FS cos а, где а - угол между направлениями силы и пути.
В системе СИ за единицу работы принят джоуль (дж) - работа, производимая силой 1 н на пути 1 м.
В практике используют иногда внесистемную единицу работы - килограммометр (кгм). Это работа силы 1 кг на пути 1 м.
1 кгм = 9,81 дж.
9.1.2. Система «тяжелоатлет — штанга» как система автоматического управления1
Системой называется совокупность элементов, взаимосвязанные функции которых координированы для выполнения определенной общей задачи. Для успешного выполнения двигательной задачи тяжелоатлет, взаимодействующий с механическим устройством — штангой, должен учитывать ее динамические свойства и соответственно координировать свои движения. Согласно приведенному выше определению, движение тяжелоатлета и штанги есть движение системы. В этой системе тяжелоатлет выступает как источник энергии, приводящий в движение штангу, и вместе с тем как регулятор, дозирующий эту энергию. Система «тяжелоатлет - штанга» является системой автоматического управления с внутренними и внешними обратными связями.
Управление движением системы «тяжелоатлет - штанга» осуществляется по принципу программного управления (внутренняя модель, по Н.А. Бернштей- ну). Любая точка штанги перемещается в основном в сагиттальной плоскости. Для анализа движений спортсмена важно знать две составляющие этого движения - вертикальную и горизонтальную. Задача управления движением в вертикальном направлении заключается в том, чтобы поднять штангу на нужную высоту с требуемой скоростью. Задача управления движением в горизонтальном направлении состоит в создании наиболее выгодных угловых соотношений в работающей кинематической цепи тяжелоатлета, обеспечивающих выполнение упражнения с наименьшим расходом энергии, а также в удержании вертикальной проекции центра тяжести системы в пределах имеющейся эффективной площади опоры (точнее - в пределах поля устойчивости) для сохранения равновесия.
По Н.М. Амосову, программа обусловливает закономерность изменения системы в пространстве и времени. Программа заложена в структуре самой системы и реализуется при определенных внешних воздействиях. Человек обладает множеством программ, которые создаются в процессе развития его организма под влиянием внешних воздействий. Двигательные программы непрерывно качественно видоизменяются и совершенствуются в ходе тренировки.
Необходимым условием формирования программ является наличие определенного объема информации.
Система «тяжелоатлет - штанга» характеризуется способностью к самонастройке. Такие системы называются в кибернетике самоорганизующимися. В процессе работы этих систем возможны различные включения, переключения, выключения отдельных элементов, а также изменение их взаимодействия и самой структуры (Э. Мишкин, Д. Бреун).
Самоорганизация, или самонастройка, в самой системе «тяжелоатлет - штанга» может происходить в основном за счет совершенствования движений тяжелоатлета в результате поиска лучшего варианта. Мотивом такой самоорганизации является необходимость достижения цели с наибольшей экономичностью в расходовании энергии и наилучшим качеством регулирования движений. Процесс овладения спортивной техникой - пример работы такой системы. Совершенно очевидно, что длительность освоения спортивной техники во многом зависит как от индивидуальных качеств тяжелоатлета, так и от знаний и опыта тренера, который должен подсказывать спортсмену пути быстрейшего становления мастерства.
Система автоматического управления действует всегда так, чтобы свести к нулю разность между величиной требуемой и величиной действительной. В самоорганизующейся системе, как уже отмечено выше, происходит непрерывная «подстройка» параметров. Например, тяжелоатлет при недостаточной скорости штанги может выполнить упражнение за счет более глубокого подседа, при выжимании штанги отклонить туловище и др. Во многих случаях такие действия могут быть и не предусмотрены двигательной программой.
Одна из важнейших характеристик системы автоматического управления - частотная ее характеристика.
Она определяет возможности системы отрабатывать без искажений входные сигналы нужной частоты. Чем выше частота, которую должна воспроизвести система, тем более высоким быстродействием она должна обладать. Это в полной мере относится и к системе «тяжелоатлет - штанга». Давно замечено, что чем выше скоростные способности спортсмена, тем лучше у него спортивный результат (при прочих равных условиях).
Стальной гриф штанги, на концах которого устанавливаются диски, прогибается во время упражнения и приводит диски в колебательное движение. В настоящее время установлено, что выполнение упражнения тяжелоатлетом более эффективно, если он правильно использует упругие свойства грифа, т. е. учитывает колебательные движения дисков штанги. Следовательно, тяжелоатлет должен иметь соответствующие скоростные способности, чтобы реагировать в нужный момент на такие движения дисков штанги. Излишне говорить о том, насколько важно развивать эти способности. Частотная характеристика тяжелоатлета определяется во многом типом его высшей нервной деятельности и физическим развитием.
Движения тяжелоатлета есть результат действия внешних и внутренних сил. Одни внешние силы действуют постоянно, например, сила тяжести спортсмена, другие - временно, только при выполнении упражнения, например вес штанги, ее сила инерции, некоторые составляющие реакции опоры.
К внутренним силам относятся силы тяги мышц, которые перемещают отдельные звенья кинематической цепи тяжелоатлета. Управление этими перемещениями осуществляется центральной нервной системой на основе информации, получаемой от специальных датчиков - мышечных, сухожильных и суставных рецепторов.
Мышцы могут работать в различных режимах. Основные из них три, при которых проявление силы происходит:
1) без изменения длины мышц (статический, или изометрический, режим),
2) при уменьшении длины мышц (преодолевающий, или миометричес- кий, режим), 3) при удлинении мышц (уступающий, или плиометрический, режим).
Предельная величина силы, проявляемой в очень медленных движениях, сравнительно мало отличается от предельной величины силы, проявляемой в изометрических условиях. При быстрых движениях предельная сила значительно уменьшается с повышением скорости. При уступающем режиме проявляемая сила может превосходить по величине силу, проявляемую при статическом режиме, в 2 раза (В. Ко- ренберг).
При выполнении тяжелоатлетических упражнений имеют место все режимы работы мышц. В соответствии с определенным режимом мышечной работы различают статические и динамические силовые способности тяжелоатлета. От первых зависит способность его развивать силу в тех или иных позах, от вторых — способность сообщать штанге ускорение при подъеме. Статическая сила измеряется обычно динамометрами, динамическая может быть определена, например, с помощью ак- сельрометров (датчиков ускорения) или расчетным путем.
Статическая сила тяжелоатлета, измеренная в ряде поз, которые он проходит при распрямлении из стартового положения до полного выпрямления, непрерывно увеличивается (JI.H. Соколов). Объясняется это тем, что рычаги кинематической цепи тяжелоатлета (голень, бедро, туловище) при каждой очередной позе все больше приближаются к вертикальному положению, динамическая же сила при том же распрямлении из стартового положения уменьшается. Подробнее об этом будет сказано в последующих главах.
Управление мышцами, как уже говорилось ранее, осуществляется центральной нервной системой.
С точки зрения биокибернетики, управление представляет собой организацию целенаправленных воздействий, результатом которых является переход системы из одного состояния в другое (Р. Гранит). Изменение состояния системы может выразиться как в механических перемещениях, так и в сложнейших психофизиологических процессах, связанных с изменением активности нервных клеток мозга вследствие восприятия управляющего воздействия. Изменение состояния объекта является целью и, следовательно, конечным результатом процесса управления.
Любой процесс управления включает в себя ряд преобразований информации, циркулирующей от одной подсистемы к другой по контуру управления. Время цикла управления, точность и надежность работы всей системы определяются особенностями тяжелоатлета как подсистемы управления. Он принимает информацию, анализирует ее, вырабатывает управляющие командные воздействия и координирует работу всех элементов системы, связывая ее в единое целое. Пластичность «сенсорного входа» позволяет спортсмену принимать информацию как непосредственно от технического объекта (штанги), так и косвенно, например с помощью приборов. Поэтому процесс управления он может оценивать по тем или иным признакам в широких пределах и достаточно точно. Как элемент системы управления тяжелоатлет может объединять отдельные сигналы в целостную структуру» что позволяет находить наиболее экономные способы получения и использования информации.
Главные элементы координации движений должны обеспечивать следующее (В.М. Дьячков):
а) придавать движению специфические форму и характер, а также определять особенности структуры движений;
б) предопределять желаемое развитие и использование активных и реактивных сил, т. е. обусловливать внутризвеньевое развитие заданной динамики движений;
в) служить в фазе развития максимального усилия средством оптимального увеличения быстроты наращивания мышечных напряжений и повышения их реактивности.
Реализация перечисленных требований дает возможность определить оптимальную структуру движений.
Взаимодействие тяжелоатлета со штангой с позиций кибернетики можно рассматривать как взаимодействие психофизиологического контура управления с техническим контуром. Качество управления движением зависит от психофизиологического контура, основными показателями которого являются так называемая полоса пропускания, диапазон чувствительности, различающая и пропускная способность.
Полоса пропускания — это частотный диапазон сигналов, адекватно воспринимаемых анализаторами (зрительными, слуховыми, тактильными и др.).
Не всякий раздражитель, воздействующий на анализатор, вызывает ощущение. Чтобы оно возникло, раздражитель должен обладать определенными свойствами и иметь определенную интенсивность воздействия. С другой стороны, воздействие, превышающее известный предел по интенсивности, нарушает деятельность анализатора. Интервал от минимальной до максимальной адекватно ощущаемой величины определяет диапазон его чувствительности.
Различающая способность - это способность тяжелоатлета воспринимать отдельные сигналы в пределах полосы пропускания, т. е. различать их, отличать друг от друга, позволяя судить о том, какая информация будет восприниматься ею как отдельный сигнал. Таким образом, если полоса пропускания характеризует общую длину «шкалы» воспринимаемых подсистемой сигналов, то различающая способность - величину «делений» этой «шкалы».
Под пропускной способностью понимается максимальный объем информации, без искажения принимаемый, перерабатываемый и передаваемый подсистемой в единицу времени.
На основании многочисленных экспериментов установлено, что для человека максимальная скорость приема информации относительно постоянна. Поэтому эта скорость служит показателем пропускной способности человека.
Таковы основные характеристики тяжелоатлета как одной из подсистем регулирования.
Рассмотрим теперь некоторые свойства другой подсистемы регулирования — штанги, состоящей из упругого грифа, на концах которого укреплены тяжелые диски.
Из теории колебаний известно, что устройства, обладающие массой и упругостью, способны совершать механические колебательные движения. Такие движения штанги могут быть с успехом использованы для повышения спортивного результата. Но прежде чем говорить об этом, напомним основные закономерности данных движений.
Представим себе стальную балку, один конец которой жестко закреплен в стене. Такая балка называется консолью. Если на ее свободный конец положить груз, он опустится, балка изогнется. Опускание конца балки увеличивается пропорционально весу груза. Прогиб балки, остающийся после того, как она уравновесится, называется статическим прогибом, а вес груза, необходимый для получения так называемой стрелы прогиба в 1 см, - коэффициентом жесткости. Если теперь подтолкнуть груз, например, книзу, то он придет в движение. Опускаясь вниз, груз будет изгибать бадау до тех пор, пока его скорость не станет равной нулю (крайнее нижнее положение). С этого момента груз начнет двигаться вверх с возрастающей скоростью. Исходного положения (равновесия) он достигнет при скорости, которая была сообщена ему в начальный момент. Пройдя положение равновесия, груз будет подниматься вверх уже с уменьшающейся скоростью, которая станет равной нулю в крайнем верхнем положении. Рассмотренные колебания груза называются свободными колебаниями.
Существуют еще вынужденные колебания системы, которые возникают под действием внешней силы. В этом случае параметры движения системы зависят от параметров внешней периодической силы, которая заставляет систему совершать вынужденные колебания. Эта периодическая сила называется возмущающей силой.
Для выяснения некоторых закономерностей вынужденных колебаний рассмотрим простую систему «пружина - груз». Если совершать качатель- ные движения рукой, которая держит свободный конец пружины, то груз, прикрепленный к другому ее концу, будет совершать вынужденные колебания вверх и вниз. Меняя частоту раскачивания, можно увеличивать или уменьшать амплитуду колебаний. Пока частота движений руки мала (медленные движения), груз перемещается практически так же, как и рука, не деформируя пружину. По мере увеличения частоты движений руки амплитуда колебаний груза значительно возрастает. В некоторый момент она становится максимальной (резонанс), после чего начинает уменьшаться. Резонанс наступает тогда, когда частота колебаний возмущающей силы равна частоте собственных колебаний системы. При очень высокой частоте колебаний руки (быстрые движения) груз практически будет неподвижен.
Следовательно, характер колебания груза зависит от движений руки, и, изменяя эти движения, можно управлять колебаниями груза. Таким образом, целенаправленно воздействуя на гриф штанги, можно получить нужные колебания ее дисков.
С увеличением частоты период колебаний уменьшается.
| 8—2180 |
Период колебаний штанги зависит от ее веса, расстояния между центрами тяжести левой и правой групп дисков (рабочая длина грифа), от диаметра грифа, его материала, а также качества изготовления. Наибольшее влияние на колебания штанги оказывает рабочая длина грифа и его диаметр (при прочих равных условиях). Анализ колебаний штанг различных конструкций показал, что период колебаний их при одном и том же весе неодинаков. Штанги «Berg» и «Schnell» имеют период колебаний на 25-30% больший, чем штанга «Ленинград». Объясняется это тем, что рабочая длина грифа штанги «Ленинград» меньше, а диаметр больше, чем у зарубежных штанг. Такое несоответствие создает значительные трудности для тяжелоатлета, поскольку требует существенной перестройки ритма движения при выполнении упражнений с непривычной штангой. Это может привести к срывам на соревнованиях, если тяжелоатлет раньше с такой штангой не тренировался или тренировался недостаточно.
Можно ли успешно соревноваться, применяя штангу «Berg» или «Schnell», если тренировки ведутся с использованием штанг «Ленинград»? Безусловно, можно, но надо сделать так, чтобы периоды колебаний снарядов были примерно одинаковыми. Для этого на втулку грифа нужно надеть кольца толщиной 6-8 см, что увеличит его рабочую длину, а уже затем - диски.
В чем преимущество штанг с большим периодом колебаний дисков? Во- первых, такой период дает возможность тяжелоатлету достаточно точно ощущать эти колебания и исходя из этого производить свои движения. При малом периоде колебаний такую диф- ференцировку осуществить трудно. Во- вторых, значительная амплитуда колебаний дисков, имеющих благодаря упругим свойствам грифа большую скорость движения, существенно облегчает выполнение упражнения.
И, в-третьих, чем больше период колебаний, тем выше динамичность воздействия тяжелоатлета на снаряд (И.П. Жеков). При одинаковом характере движений тяжелоатлета со штангой одного и того же веса динамичность его воздействия на снаряд будет значительнее при использовании штанги, имеющей больший период колебаний. Наилучший эффект будет достигнут при условии, если период движения атлета равен периоду колебаний штанги, т. е. в случае резонанса.
9.1.3. Специфические условия выполнения тяжелоатлетических упражнений
Выполнение упражнений со штангой протекает в определенных специфических условиях и характеризуется своеобразными действиями атлета.
Итак, каковы эти условия?
1. Тяжелоатлетические упражнения выполняются с отягощениями как небольших и средних, так и больших и очень больших весов. Это требует от мышечной системы атлета, принимающей участие в движениях, проявления различных по величине вплоть до максимальных динамических и статических напряжений. Чем тяжелее вес снаряда, тем больше мышц вовлекаются в движение.
2. Тело человека представляет собой открытую кинематическую цепь с большим числом звеньев при наличии во всех из них трех степеней свободы движений. Это обеспечивает выполнение точных и многообразных по координации действий. Кости человека являются живыми элементами сложных биомеханических систем. Подобную систему рычагов составляют верхние и нижние конечности человека. В этой системе при выполнении тяжелоатлетических упражнений рычаги оказываются нагруженными на своих концах. Открытая кинематическая цепь, образованная костными рычагами и дополненная мышечными тягами, в большей степени приспособлена к механическим условиям, способствующим выигрышу в скорости движения.
3. При выполнении тяжелоатлетических упражнений тело спортсмена и его отдельные звенья перемещаются относительно друг друга и движущейся штанги. Изменение их первоначального и последующего положений происходит быстро, за очень короткий отрезок времени сменяется и направление движения на противоположное.
4. В процессе выполнения упражнения с отягощением наблюдается чередование концентрического (мио- метрического), преодолевающего, эксцентрического (плиометрического), уступающего и изометрического (статического) типов мышечного сокращения. Преодолевающий тип мышечного сокращения бывает относительно спокойным или «взрывным». Часто преодолевающий тип сокращения одних и тех же работающих групп мышц очень быстро сменяется на уступающий. Имеет место кратковременное движение снаряда по инерции и разного характера сокращения мышц одновременно в различных звеньях тела, когда одни мышечные группы осуществляют активные движения (выполняют позитивную, динамическую работу), другие- фиксируют определенное положение в суставах (выполняют статическую работу).
5. Несколько необычны условия равновесия при исполнении упражнений со штангой. Общий центр массы системы «атлет - штанга» непрерывно, до окончания упражнения, то повышается, то понижается над ограниченной площадью опоры с разной скоростью. Это увеличивает опрокидывающий момент и создает трудности для сохранения устойчивого равновесия.
9.1.4. Основы техники
К основам техники соревновательных упражнений следует отнести такие действия атлета, которые придают ей рациональность и эффективность, т.е. оптимальным образом обеспечивают решение их главной двигательной задачи - поднять снаряд наибольшего веса над головой на выпрямленные руки.
В соответствии с установившимися понятиями о рациональном и эффективном способе выполнения упражнений к основам техники движений в соревновательных упражнениях в тяжелоатлетическом спорте следует отнести следующие требования.
1. Создание в работающих суставах оптимальных угловых отношений, особенно в наиболее трудных участках пути подъема штанги, когда невозможно использовать ее движение по инерции.
2. Повторное включение в работу мощных мышц ног и туловища.
3. Последовательное включение в работу определенных мышечных групп, вначале более сильных, затем менее сильных.
4. Обеспечение на каждом участке пути подъема штанги наиболее рационального направления ее движения и сообщение ей оптимальной скорости.
5. Создание необходимых условий, обеспечивающих эффективность выполнения финального разгона штанги.
6. Создание необходимых опорных условий телу атлета и его разным звеньям с целью более продолжительной и эффективной передачи мышечных усилий штанге, вначале для обеспечения ее подъема вверх, а затем для сдерживания ее падения вниз.
7. Использование движущейся штанги в качестве верхней опоры для выполнения ухода под нее при значительной скорости перемещения разных звеньев тела атлета.
9.1.5. Фазовая структура[10]
Расчленение целостного действия, каким является классическое упражнение, производится на основе выявления в нем таких частей, которые заметно отличаются друг от друга и разрешают определенную двигательную задачу.
Период- относительно самостоятельная часть классического упражнения, в процессе которой подготавливаются рациональные условия для повышения эффективности его последующих движений. В каждом периоде происходят значительные изменения в пространственных, временных, пространственно-временных (кинематических), динамических и ритмических характеристиках движений, в которых наблюдается относительная законченность действия. На границах периода в мышцах ног и туловища начинается смена типа мышечного сокращения.
Фаза- более мелкая составная часть упражнения. Это очередная ступень развития двигательного акта, в которой начинают проявляться новые количественные и качественные изменения в характеристиках движения. На границах фаз происходит смена форм мышечного сокращения в основных группах мышц, принимавших участие в двигательном действии. Предыдущая фаза создает оптимальные условия для решения двигательной задачи последующей фазы. Фазы имеют определенные временные характеристики; их продолжительность зависит от спортивной квалификации исполнителя упражнения, его роста и веса штанги.
Элементы - слагающие компоненты фаз. Если периоды и фазы являются неотъемлемыми частями упражнения, сопутствуют технике любого исполнителя, то элементы свидетельствуют об индивидуальности техники, связаны с телосложением спортсмена, его физическими, психическими и функциональными возможностями. Элементы техники можно отнести к ее деталям.
В технике упражнения различают части: подготовительную, главную и заключительную.
Подготовительная часть создает оптимальные условия для осуществления задач, заложенных в главной части, действия которой направлены на решение основной двигательной задачи упражнения. Заключительная часть обеспечивает в действиях выполнение определенных условий для эффективного завершения главной двигательной задачи.
В рывке подготовительная часть состоит из двух периодов; старта и тяги; главная - включает в себя подрыв и уход; заключительная - вставание.
В толчке, как более сложном в техническом отношении упражнении, наблюдается другое чередование частей: появляются две подготовительные и две главные части. К первой подготовительной части относятся: старт и тяга; к первой главной - подрыв и уход; ко второй подготовительной - вставание; вторая главная часть включает выталкивание и уход; заключительная - вставание.
9.1.6. Техника рывка и толчка
Рывок- первое соревновательное упражнение классического двоеборья - выполняется двумя способами: с «ножницами» и «разножкой» (с приседом). В основном они отличаются техникой ухода (приседа) под штангу и вставанием. В настоящее время на соревнованиях современные атлеты не применяют первый способ. Однако рывок в «ножницы» не потерял своего значения в тренировочном процессе штангистов. При его выполнении не требуется хорошей специальной подвижности в плечевых, голеностопных суставах и умения сохранять равновесие при ограниченной площади опоры.
Рывок - сложное в координационном отношении движение. В его технике различают 5 периодов: старт, тягу, подрыв, уход (подсед), вставание.
Старт (рис. 9.1).
Старт состоит из двух фаз: подхода к штанге (с двигательной задачей - создать оптимальные условия для выполнения подседа) и подседа (с задачей - принять позу (стартовое положение), рациональную для обеспечения жесткого взаимодействия между звеньями кинематической цепи тела человека).
После подхода к штанге спортсмен принимает позу «стартовое положение», из которого к грифу начинает прикладывать усилия для подъема его вверх. Ноги расставляются в стороны на расстояние, равное ширине таза, стопы параллельны или немного разведены наружу. В передне-заднем направлении они ставятся так, чтобы в стартовом положении голени касались грифа, а середины головок левой и правой плечевых костей находились над ним.
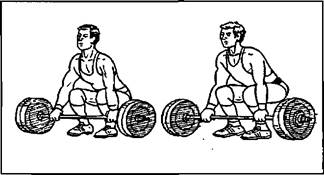 Рис. 9.1
Рис. 9.1
|
Стартовое положение в рывке принимают четырьмя способами.
Первый способ. Без отчетливо выраженных подготовительных движений или статический старт. Атлет наклоняет туловище (при этом больше или меньше сгибает колени), руками берется за гриф, еще больше сгибает ноги, делает выдох. Подъем штанги выполняется на неполном вдохе. До того момента, как к грифу прикладываются усилия, спортсмен, как правило, делает несколько малозаметных движений и натягивает мышцы рук и плечевого пояса: в этот момент он ощущает натяжение трапециевидных, широчайших мышц спины и в локтевых суставах. В стартовом положении голова находится в одной плоскости с туловищем.
Захват. Существует три способа захвата - обхвата грифа пальцами рук: обыкновенный, в «замок» и односторонний.
Обыкновенный захват: четыре пальца обхватывают гриф с одной стороны, а большой палец - с другой, надавливая на указательный и средний, прижимая их к грифу. Захват в «замок»: большой палец руки обхватывает гриф с одной стороны, а четыре - с другой и прижимают его к грифу. Односторонний захват: все пять пальцев обхватывают гриф с одной стороны.
При выполнении классических упражнений штангу разрешается держать хватом сверху, при этом ладонь накладывается на гриф сверху так, что большие пальцы оказываются повернутыми внутрь. При выполнении рывка применяют захват в «замок»: он надежнее и прочнее других.
Хват. Протяженность хвата измеряется расстоянием между кистями рук. В рывке применяют широкий хват. Он позволяет при той же скорости движения штанги вверх сократить высоту, на которую необходимо поднимать снаряд от помоста, чтобы прочно держать его в опорном приседе на прямых руках, а также на более длительном пути активно воздействовать на штангу: в тяге и в подрыве.
Второй способ - старт с подготовительными движениями в горизонтальной плоскости. После захвата грифа делается плавное движение плечами назад от штанги с полным сгибанием ног в коленных суставах: таз опускается вниз, туловище принимает почти вертикальное положение, руки прямые. Атлет совершает неполный вдох. Далее он делает обратное движение и постепенно увеличивает натяжение рук, трапециевидных и широчайших мышц спины; усилия, прикладываемые к грифу штанги, понемногу возрастают. Наибольшей величины они достигают при возвращении плечевых суставов в положение над грифом. Прежде чем приступить к подъему штанги, атлет может совершить несколько таких подготовительных полных и неполных движений.
Третий способ - старт с подготовительными движениями в вертикальной плоскости. Он имеет два варианта.
1. После захвата грифа спортсмен почти полностью выпрямляет ноги, таз поднимает вверх, туловище переводит почти в горизонтальное положение, совершает неполный вдох. Затем, сгибая ноги и опуская таз вниз, он прини
мает стартовое положение, постепенно увеличивая натяжение рук. Некоторые атлеты совершают несколько законченных и незаконченных таких подготовительных действий.

|
2. При захвате руками за гриф тяжелоатлет сгибает ноги, а туловище сразу переводит почти в горизонтальное положение; после этого выполняет действия, описанные выше.
Четвертый способ - старт с хода. Спортсмен делает несколько пружинящих движений вниз-вверх (голеностопные, коленные и тазобедренные суставы синхронно сгибаются и разгибаются), приноравливается руками и концентрирует внимание для захвата грифа. Делает неполный вдох и вслед за тем, опускаясь вниз, быстро принимает стартовое положение и без задержки начинает выполнять упражнение.
Три последних способа перехода в стартовое положение относятся к динамическим стартам.
Тяга (рис. 9.2, 9.3).
Второй период включает фазу взаимодействия атлета со штангой (задача - создать жесткую систему передачи усилий от ног и туловища к грифу штанги)
|
|
|

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...
Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...
© cyberpedia.su 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

