Погрешность ∆п.у передаточных устройств обусловливается совокупным влиянием целого ряда кинематических погрешностей. Рассмотрим наиболее значимые из них.
Погрешность ∆ 1, обусловленная неточностью изготовления плеч рычага. При изготовлении рычага допуск его плеч составляет ±(0,05...0,1) мм. Это приводит к возникновению погрешности ∆ 1. Рассмотрим равноплечие рычаги (рис. 2.78, а).
Если длина одного плеча l 1 = l mах, а другого — l 2 = l min (l mах, l min в пределах допуска), то перемещения а 1 и а 2 при повороте рычага на угол β будут отличаться. Тогда ∆1 = а 1 — а 2 = (l 1 – l 2 ) sin β. Принимая sin β = а 1/ l 1, находим
На практике возможно также появление погрешности в угловом γ расположении плеч рычага (рис. 2.78, б). В этом случае
 Погрешность ∆1 наиболее ощутима у рычагов с передаточным отношением k > 1.
Погрешность ∆1 наиболее ощутима у рычагов с передаточным отношением k > 1.
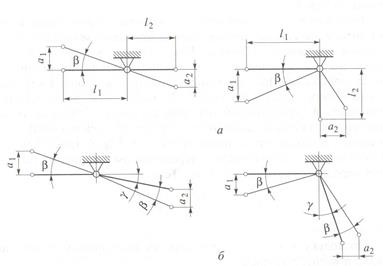
Рис. 2.78. Схемы для определения погрешности А, для равноплечих рычагов
Погрешность, вызываемая зазором между отверстием и осью рычага (∆2). Даже если зазор s между осью и отверстием минимален, он будет оказывать серьезное влияние на точность измерения. Согласно схемам, представленным на рис. 2.79, имеем
где 
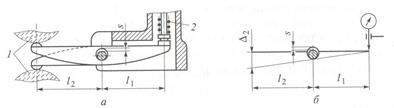
Рис. 2.79. Схемы для определения погрешности ∆2: 7 — деталь;
2 — индикатор
Из данного выражения следует, что зазор оказывает влияние на точность измерения даже при k = 1. Это влияние будет еще большим при k > 1.
Погрешность ∆3, возникающая вследствие непропорциональности между линейными перемещениями измерительного стержня и угловым перемещением рычага. Как правило, в передачах одно плечо рычага перемещает измерительный стержень индикатора, совершающий поступательное движение, в то время как само плечо поворачивается на угол α. В этом случае возникает погрешность в передаточном отношении, которая зависит от непропорциональности линейного и углового перемещений. Линейное смещение щупа индикатора а = l tg α (рис. 2.80, а). Чтобы выявить погрешность в передаточном отношении рычажных передач, разложим tg α в ряд Тейлора:
где α — в рад.
Поскольку α «1, то, пренебрегая величинами пятого порядка и выше, получаем

Тогда

откуда

Погрешность, обусловленная смещением точки контакта сферического наконечника при повороте плоского рычага ∆4. Рабочие концы плеч рычагов имеют точечный контакт со стержнем индикатора или с контролируемой поверхностью (рис. 2.80, б). Радиус r = 2...3 мм. В этом случае неизбежно появление погрешности ∆4 от смещения точки контакта, так как в ходе поворота
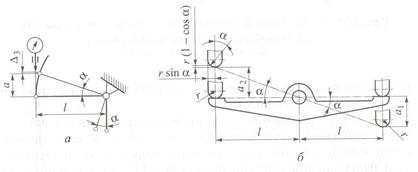
Рис. 2.80. Схемы для определения погрешностей ∆3 (а) и ∆4 (б)
рычага точка контакта перемещается по сфере радиусом r. При повороте рычага на угол а контакт плеч будет различным на двух его концах. В этих условиях появляется дополнительная погрешность, значение которой зависит от расстояний а 1 и а 2.
Для равноплечего рычага (l 1 = l 2= l)

Здесь

Погрешность ∆5, возникающая в прямой передаче. Очень часто в прямой передаче используют промежуточный стержень (рис. 2.81, а), который играет роль буфера между измерительным прибором и контролируемой деталью и защищает прибор от возможных толчков и ударов.

Рис. 2.81. Схема прямой передачи (а) и расчетные схемы для определения ее погрешности (б, в):
1 — ось индикатора; 2 — деталь
Причиной появления этой погрешности является зазор s между стержнем и отверстием (s = D 1 — D), а также смещение е оси измерительного щупа относительно оси этого стержня. При перемещении стержня вдоль оси 0 1 0 1 на расстояние АВ (рис. 2.81, б) наконечник индикатора сместится на расстояние АС.
Тогда

где β = arctg (s/H).
Как правило, АВ  а, где а — измеряемая погрешность детали.
а, где а — измеряемая погрешность детали.
В ходе установки индикатора всегда имеется смещение е оси его щупа относительно оси промежуточного стержня и поворот стержня на угол р в направляющей втулке (рис. 2.81, в), т. е.

Окончательно имеем

Общую погрешность передаточных устройств после расчета всех ее составляющих определяют по формуле








