Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...
Топ:
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Эволюция кровеносной системы позвоночных животных: Биологическая эволюция – необратимый процесс исторического развития живой природы...
Интересное:
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Расчет зажимных устройств проводят в целях определения основных размеров этих механизмов. По известной силе закрепления Q рассчитывают прикладываемую силу Р или развиваемый момент М, которые определяют геометрические параметры механизма.
Винтовые механизмы
Винтовые механизмы просты и надежны. Зная необходимую силу закрепления Q, определяют номинальный (наружный) диаметр винта по формуле

где с — коэффициент, зависящий от типа резьбы (для метрической резьбы с = 1,4);  — напряжение растяжения.
— напряжение растяжения.
|
|
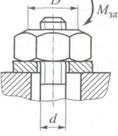
Рис. 2.19. Зажимный элемент винт — гайка
Момент, развиваемый на рукоятке ключа (рис. 2.19),

где  — средний радиус резьбы;
— средний радиус резьбы;  — угол подъема резьбы;
— угол подъема резьбы;  — угол трения в резьбе;
— угол трения в резьбе;  — момент трения на опорном торце гайки или винта,
— момент трения на опорном торце гайки или винта,
При откреплении необходимо преодолевать трение покоя, поэтому 
В табл. 2.3 приведены формулы для расчета момента затяжки.
Таблица 2.3
Формулы для расчета момента затяжки винтами разной конструкции
| Условие работы винта | Схема | Формула для расчета |
| Работа на сжатие То же Работа на растяжение | 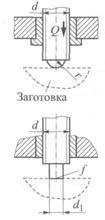

|

 при при 
|
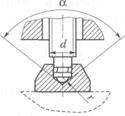
Эксцентриковый зажим
Эксцентриковые зажимы (рис. 2.20, а) являются быстродействующими, обладают свойством самоторможения, но плохо работают в условиях вибраций. Параметры, необходимые для проведения расчета: IT — допуск на размер детали, по которому производится закрепление; а — угол поворота эксцентрика из начального положения; Q — сила закрепления;  — гарантированный зазор для установки заготовки под эксцентриком
— гарантированный зазор для установки заготовки под эксцентриком
( = 0,3...0,4 мм);
= 0,3...0,4 мм);  — зазор, учитывающий износ эксцентрика (
— зазор, учитывающий износ эксцентрика ( = 0,4...0,6 мм);
= 0,4...0,6 мм);  — жесткость зажимного устройства приспособления.
— жесткость зажимного устройства приспособления.
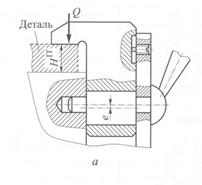
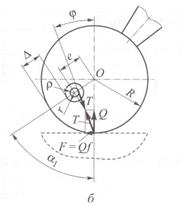
Рис. 2.20. Эксцентриковый механизм закрепления (а) и его расчетная схема (б)
Последовательность расчета следующая.
1. Определить эксцентриситет:
При заданном угле поворота эксцентрика 
2. Вычислить радиус цапфы r (из условия смятия):

При 

где  — допускаемое напряжение на смятие.
— допускаемое напряжение на смятие.
3. Определить радиус R наружной поверхности эксцентрика (из условия самоторможения). Равнодействующая Т от действия сил Q и F должна быть уравновешена реакцией со стороны цапфы и быть направлена по касательной к радиусу  круга трения (рис. 2.20, б ):
круга трения (рис. 2.20, б ):

но  , поэтому
, поэтому

где  = 0, 12 ... 0, 15 — коэффициент трения в цапфе;
= 0, 12 ... 0, 15 — коэффициент трения в цапфе;  — угол трения покоя.
— угол трения покоя.
4. Найти угол поворота  для наименее выгодного положения эксцентрика с учетом его самоторможения:
для наименее выгодного положения эксцентрика с учетом его самоторможения:

5. Вычислить ширину рабочей части В эксцентрика (из условия смятия):
где  — модули упругости материалов эксцентрика и заготовки.
— модули упругости материалов эксцентрика и заготовки.
6. Определить силу (или момент) закрепления на рукоятке. На эксцентрик при закреплении действуют три силы реакции (рис. 2.21): S (в цапфе), Т (на заготовке) и N (на рукоятке механизма). Под действием этих сил рассматриваемая система находится в равновесии, т. е.
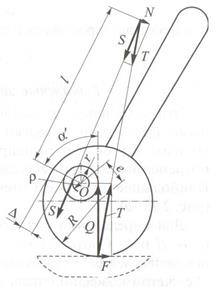
Рис. 2.21. Схема для определения длины плеча рычага


После преобразований имеем
Согласно действующим нормативным документам, значение силы закрепления N< 150 Н.
Клиновые механизмы
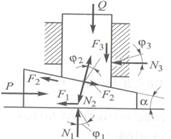
Клиновые механизмы (рис. 2.22) главным образом используют в качестве промежуточных звеньев в сложных механизмах. Они
|
|
компактны и просты в изготовлении, позволяют изменять силу закрепления и ее направление, легко встраиваются в приспособления. Для клинового механизма, изменяющего направление силы на 90°,
| Рис. 2.22. Клиновый механизм |
Знак «+» здесь соответствует закреплению, «—» — раскреплению, угол  обычно равен 15°. При
обычно равен 15°. При  =
=  =
=  =
=  формула упрощается и принимает вид
формула упрощается и принимает вид
|
|
|

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...
© cyberpedia.su 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!