| Модель
| Повышение про- изводи- тель- ности оборудования, %
| Ожидаемый экономический эффект, тыс. руб.
| Число вы- еврбож- даемых рабочих в смену
| Время цикла обработки деталей, мин
(с)
|
| РТК
| ПР
| станка
|
| Роботизированные к
МО-1Ц611-Ритм
| омплексы токарной до 5
«Ритм-01.01»
| обработки деталек 00 мм, массой до
1И611ПМФЗ
| i типа вал< 10 кг
До 150
| ов диаметре
1,5-2,0
| >м до 50 м
| [М, длиной
0,15- 0,5
|
| НТЗОЗКР
| 2М4ЦЛ-20ГПЗ
| 1Н713
| нд
|
| нд
| нд
|
| -
| «Циклон-ЗБ»
| 1А730Ц
| нд
| нд
| нд
| нд
|
| -
| ПР-4
|
| нд
| нд
| нд
| (23,5)
|
| -
| «Бриг-1 ОБ»
| А616ФЗ
| нд
| нд
| нд
| нд
|
| -
| МП
| 1713-2 шт.
| нд
| 16,1
|
| 4,18
|
| -
| МП
| 1716Ц — 2 шт.
| нд
| НД
| нд
| нд
|
| Роботизированные i
| комплексы токарно длиной 1
СМ40Ц.40.11
| й обработки дета 10 700 мм, массой
| лей типа [ до 40 кг
нд
| валов диа
нд
| метром д
НД
| о 80 мм,
нд
|
| -
| СМ80Ц.48.11
| 16К20ФЗ
|
|
| 1,2
| 5-6
|
| -
| СМ40Ц.40.11
| МР-71; 1А730
| нд
| нд
| нд
| нд
|
| -
| СМ40Ф2.80.01
| 171ЭФЗ — 2 шт.
| нд
| нд
| нд
| нд
|
| АСВР-041
| СМ40Ф2.80.01
| 16К20Т1 - 2 шт.
|
|
|
| 5-10
|
| —
| «Пирин» — 2 шт.
| 174СА - 2 шт. (центровальный полуавтомат)
| нд
| 5,6
|
| 1,1
|
| Роботизированные i
JIAC-ЧПУ
| комплексы токарно* длиной дс
СМ 160Ф2.05.01
| i обработки детал > 2000 мм, массой
1Б732ФЗ - 2 шт.
| гей типа 1 [ до 160 к
нд
| калов диам
X
100-290
| етром до
5,3-6,7
| 160 мм,
|
| АСВР-05
| УМ160Ф2.81.01
| МР-73М 1Б732ФЗ - 2 шт.
|
|
|
| 10-15
|
| АСВР-01
| УМ160Ф2.81.01
| MP-179
1Б732ФЗ - 2 шт.
|
|
|
| 10-15
|
| АСВР-02
| УМ160Ф2.81.01
| 1Б732ФЗ —3 шт.
|
|
|
| 10-15
|
Продолжение табл. 3
| Модель
| Повышение про- изводи- тель- ности оборудования, %
| Ожидаемый экономический эффект, тыс. руб.
| Число высвобождаемых рабочих в смену
| Время цикла обработки деталей, мин (с)
| | РТК
| ПР
| станка
| | Роботизированные
| комплексы токарно длиной
МП-5П
| й обработки дета 200 мм, массой /
1П752ИФЗ
| лей типа \о 10 кг
нд
| фланцев л
нд
| (иаметром
НД
| 160 мм,
нд
| | БРСК-01
| М20Ц.48.01
| 1В340Ф30
|
|
| 1,3
|
| |
| «Бриг-10»
| 16К20
| нд
| 3,8
| НД
| 0,43
| |
| «Бриг-10»
| 1К62
| нд
| 1,3
|
| 0,43
| | Роботизированные ь
| :омплексы токарной длиной J
УМ-1
| обработки детал (о 200 мм, массой
АТ-250П —2 шт.
| ей типа ф [ до 40 кг
| >ланцев диа
нд
| метром дс
нд
| ) 250 мм,
нд
| | МРК40-202
| М40П.05.01
| МР-315
| нд
| нд
| НД
| 3-12
| | РРТК-1.Д98
| СМ80Ц.25.03
| 1П756ДФ398
| нд
| НД
| НД
| нд
| | -
| УМ160Ф2.81.02
| 16КЗОМФЗ- 2 шт.
| нд
| НД
| нд
| нд
| | -
| УМ160Ф2.81.02
| 1П752МФ305 — 2 шт.
| нд
| нд
| нд
| (20)
| | Роботизированные к
| гомплексы токарнойРФ-204М
| обработки детале1И611ПФЗ
| й типа ва.
нд
| пов и флаш
. НД
| дев массон
нд
| 1 до 10 кг
нд
| | -
| РФ-201М
| 1А616
| нд
| НД
| НД
| НД
| | -
| М10П.62.01
| 16К20ФЗ
|
|
| 1,3
|
| |
| М20П.40.01
| 16К20ФЗ
|
| 1,6
| 1,5
| 10-15
| | Роботизированнь
АСВР-06
| ie комплексы финш
СМ40Ф2.80.01
| иной и комбиниро!
ЗМ151Ф2 —2шт.
| ванной об]
| работки де!
| галей типа
6,5
| i валов
8-10
| |
| СМ40Ц.40.11 и МР-80
| 10А803 16К20-2шт.МТ-57(агрегатный)
| нд
| 5,2
|
| 2,2
| | АСВР-07
| УМ160Ф2.81.01
| МА3926 ЗМ163Ф2 — 2 шт.
|
|
| 6,5
| 12-15
| |
Продолжение табл. 3
| Модель
| Повышение про- изводи- тель- ности оборудования, %
| Ожидаемый экономический эффект, тыс. руб.
| Число высвобождаемых рабочих в смену
| Время цикла обработки деталей, мин (с)
| | РТК
| ПР
| станка
| | Роботизированные к
(I)
| :омплексы обработк КМ10Ц.42.01
| и корпусных дета.
Агрегатные станки ЗХА4242 3XA4243
| пей Maccoi
нд
| и до10 кг
| а) и до1
НД
| 60 кг (И)
0,75
| | И5.06(11)
| УМ160Ф2.81.01
| 2Р135Ф2 — 3шт.
| нд
| нд
| нд
| До 85
| | И5.02(11)
| УМ160Ф2.81.01
| ИР-500МФ4 5шт.
|
| 123,9
|
| 240-270
| |
Примечания: 1. См. Каталог. Роботизированные комплексы. Оборудование — робот стран — членов СЭВ. НПО ЭНИМС, М.: НИИмаш, 1984. 2. В РТК, кроме указанных случаев, применяют один ПР и один станок. 3. При отсутствии данных в таблице указано — нд.
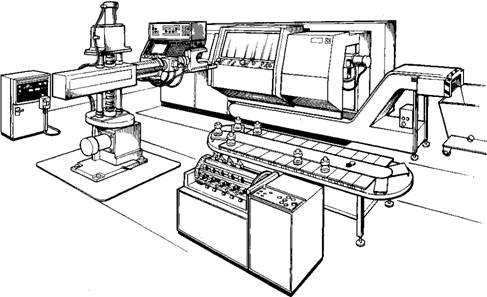 Рис. 3. Роботизированный технологический комплекс на базе станка 1720ПФ30 с напольным промышленным роботом М20П.40.01. тактовым столом и устройством быстрой смены резцовых головок с помощью ПР
Рис. 3. Роботизированный технологический комплекс на базе станка 1720ПФ30 с напольным промышленным роботом М20П.40.01. тактовым столом и устройством быстрой смены резцовых головок с помощью ПР
|
 Рис. 4. Типовые планировки РТК на базе патрон- но-центрового станка 16К20ФЗ с ЧПУ: а - РТК16К20ФЗР1Э2 с ПР М10П.62.01, с УЧПУ для станка 2Р22 и для робота «Контур» с тактовым столом СТ220; б — РТК 16К20ФЗР2Э2 на базе токарного патронного станка 16К20РФЗ с ЧПУ с ПР М20П.40.01, 6 УЧПУ для станка 2Р22 и для робота «Контур» с тактовым столом СТ350
Рис. 4. Типовые планировки РТК на базе патрон- но-центрового станка 16К20ФЗ с ЧПУ: а - РТК16К20ФЗР1Э2 с ПР М10П.62.01, с УЧПУ для станка 2Р22 и для робота «Контур» с тактовым столом СТ220; б — РТК 16К20ФЗР2Э2 на базе токарного патронного станка 16К20РФЗ с ЧПУ с ПР М20П.40.01, 6 УЧПУ для станка 2Р22 и для робота «Контур» с тактовым столом СТ350
|
4. Техническая характеристика промышленных роботов М10П.62.01 и М20П.40.01
| Параметры
| Модель робота
| | М10П.62.01
| М20П.40.01
| | Грузоподъемность, кг: суммарная
|
|
| | на одно захватное устройство
|
|
| | Число степеней подвижности (без захватного устройства)
|
|
| | Число: рук
|
|
| | захватных устройств на руку
|
|
| | Привод
| Электропневматический
| | Система управления
| Позиционная
| | Число программируемых координат
|
|
| | Способ программирования перемещений
| Обучение
| | Объем памяти системы (число точек)
|
| | Погрешность позиционирования, мм
| ±0,5
| ±1,0
| |
основные поняли
Продолжение табл. 4
| Параметры
| Модель робота
| | М10П.62.01
| М20П.40.01
| | Наибольший вылет R руки, мм Масса, кг
| 630 110
| 1100 570
| | Линейные перемещения и скорость перемещения по координатным осям:
перемещение по оси X, мм скорость перемещения, м/с перемещение по оси Z, мм скорость перемещения, м/с перемещение в направлении R, мм скорость перемещения, м/с
| 150 0,008-0,5
150 0,008-0,5
| 500 0,008-0,5 1100 0,008-1,0
| | Угловые перемещения и скорость угловых перемещений по координатным осям:
угол поворота А, ° скорость поворота, °/с угол поворота В, ° скорость поворота, °/с угол поворотаС, ° скорость поворота, °/с угол поворота а, °
скорость поворота, °/с угол поворотар, ° скорость поворота, °/с угол поворота 0, ° скорость поворота, °/с
|
1,36-120 120 1,36-120 180 1,36-120 -90; 0; 90; 180 90
| -90-180
.60 + 3,5 30 300 0,001-0,06
| |

|
переходе с одного диапазона захвата на другой требуется переналадка, что необходимо учитывать при подборе номенклатуры деталей, обрабатываемых на РТК. При выборе типа захватного устройства необходимо сравнить момент от массы каждой заготовки с допустимой величиной (табл. 6).
 Рис. 5. Схемы перемещений рабочих органов по координатным осям ПР: а - М10П.62.01: б- М20П.40.01
Рис. 5. Схемы перемещений рабочих органов по координатным осям ПР: а - М10П.62.01: б- М20П.40.01
|
Тактовый стол (СТ) предназначен для хранения запаса заготовок и подачи их в зону захвата ПР (табл. 7). Заготовку можно устана-

| Рис. 6. Захватные устройства к ПР М10П.62.01 (типы захватов: а - С01, С02; б-С07; д -С08) и М20П.40.01 (типы захватов: в — С05; г — С06)
|









