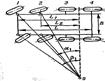
Схемы: а) С одним задним ведущим мостом (автомобили общетранспортного назначения с колесной формулой 4х2), б) Три двухшарнирные карданные передачи (двухосные полноприводные автомобили), в) Автомобили с индивидуальным приводом мостов, г) Полноприводные автомобили со средним проходным мостом
1.Коробка передач,2,4,7.9,10. Карданные валы,3. Промежуточная опора, 5. Задний ведущий мост, 6. Раздаточная коробка, 8. Средний мост, 11. Передний мост, 12. Дополнительный редуктор. Конструкция и расчет карданных передач. В карданной передаче рассчитывают следующие элементы: карданный вал (на кручение, растяжение – сжатие, угол закручивания); вилку и крестовину (на прочность и износ); подшипники карданного шарнира (на долговечность); критическую частоту вращения вала.
Расчет карданного вала, вилки и крестовины на прочность. Опытные данные показывают, что при резком включении сцепления инерционный момент двигателя может быть в 2,5-3,5 раза больше максимального крутящего момента двигателя. Для ориентировочных расчетов коэффициент динамичности Кд (отношение максимального ''пикового'' момента к максимальному моменту Мд двигателя) может быть определен по следующей эмпирической формуле: Кд = βс*(u+8)/u, где: и = ик ∙ ид ∙ио – передаточное число трансмиссии (коробки передач, дополнительной коробки, главной передачи); β – коэффициент запаса сцепления. Величина углов закручивания карданного вала: θ = 180*Мд*uк*Кд*l/(π*G*Iкр) где: Iкр – момент инерции сечения вала при кручении; G – модуль упругости при кручении; ℓ - длина вала. Угол θ может составлять на низшей передаче от 3 до 9о на 1 м длины (в зависимости от сечения вала). Относительный угол сдвига трубы карданного вала, соответствующий пределу текучести:Ψ = 2*γ*l/(100Д), где: γ - допустимый, для передачи текучести остаточный сдвиг (0,3 %); Д – диаметр вала.
Требования, предъявляемые к рулевому управлению. Кинематический и прочностной расчеты рулевых механизмов.
1.Высокая маневренность автомобиля, т.е. способность быстро и круто поворачиваться на ограниченных площадях. 2. Легкость управления на месте и в движении. 3. Правильная кинематика поворота, при которой все колеса будут катиться без бокового скольжения (чистое качение), т.е. по строго концентрическим окружностям. 4. Малая величина импульсов (толчков), передаваемых от управляемых колес на руль. 5. Следящее действие, т.е. строгая согласованность действия рулевого управления с поворотом управляемых колес. 6. Суммарный люфт в механизме управления и в приводе, при прямолинейном движении на рулевом колесе, должен быть не более 10-20о (30-40 мм по ободу рулевого колеса). При проектировании рулевого управления автомобиля производятся два вида расчетов: кинематический расчет рулевого привода ; прочностной расчет деталей рулевого управления. Задачей кинематического расчета является определение размеров рычагов рулевой трапеции, углов их наклона по отношению к продольной оси автомобиля и подбор нужных передаточных чисел рычажной системы привода к управляемым колесам. Задачей прочностного расчета является определение размеров деталей, обеспечивающих высокую их прочность, а также напряжений в деталях, размеры которых определены по конструктивным соображениям. Рассмотрим оба вида расчетов.

 Схема для кинематического расчета рулевого привода Кинематический расчет рулевого привода. Кинематический расчет рулевого привода производится в два этапа. Сперва находят размеры рулевой трапеции и передаточные числа рычажной системы привода (проектный расчет) для какого-нибудь одного положения управляемых колес, после чего, зная геометрию привода, производится по поверочный расчет для разных положений управляемых колес. При этом устанавливается возможное боковое скольжение колес на разных радиусах поворота автомобиля. При проектировании рулевой трапеции автомобиля с одной передней управляемой осью по графику для данного отношения В/L, которое известно из технического задания, и выбранного отношения m/n находится величина х. В среднем величина х = 0,7 ÷ 0,8. Найдя угол φ наклона рычагов рулевой трапеции из выражения φ = arcctg В/(2*x*L), определяют величину п из отношения n=В/(1+2m/n*cosφ). После того как определены размеры рулевой трапеции, графическим методом определяют положение центра поворота автомобиля для разных радиусов поворота.
Схема для кинематического расчета рулевого привода Кинематический расчет рулевого привода. Кинематический расчет рулевого привода производится в два этапа. Сперва находят размеры рулевой трапеции и передаточные числа рычажной системы привода (проектный расчет) для какого-нибудь одного положения управляемых колес, после чего, зная геометрию привода, производится по поверочный расчет для разных положений управляемых колес. При этом устанавливается возможное боковое скольжение колес на разных радиусах поворота автомобиля. При проектировании рулевой трапеции автомобиля с одной передней управляемой осью по графику для данного отношения В/L, которое известно из технического задания, и выбранного отношения m/n находится величина х. В среднем величина х = 0,7 ÷ 0,8. Найдя угол φ наклона рычагов рулевой трапеции из выражения φ = arcctg В/(2*x*L), определяют величину п из отношения n=В/(1+2m/n*cosφ). После того как определены размеры рулевой трапеции, графическим методом определяют положение центра поворота автомобиля для разных радиусов поворота.
К расчету рулевой трапеции
После определения размеров рулевой трапеции проверяется поворот автомобиля на боковое скольжение
 Расчетная схема поворота двухосного автомобиля. Для этого поступаем следующим образом. Графически задаемся углами β поворота внутреннего колеса (например, 10, 20, 30, 40о) и определяем из построения соответствующие им углы поворота наружного колеса α (рис. 9.4). Из теории поворота имеем выражение теоретического радиуса поворота Rт и продольной координаты L' положения центра поворота О. RТ = Вsinβ/ sin(β-α)+b, L' = (RТ – b) sin α. Расчетная схема поворота многоосного автомобиля. Чтобы автомобиль поворачивался без бокового скольжения неуправляемых колес, должно соблюдаться равенство L' = L.. Обозначим L': L = λ, тогда из формул получим λ = sinα*sinβ*B/(sin(β-α)*L). При проектировании рулевого привода трехосных автомобилей, имеющих балансирную тележку (ЗИЛ-131, Урал-375 и др.), центр поворота (О) целесообразно располагать не на оси задних колес, а на оси задней тележки. В этом случае за расчетную базу L принимается расстояние между управляемой осью и осью тележки.Необходимо добиваться, чтобы при всех углах поворота колес, особенно больших, λ было близким к единице. В этом случае центр поворота будет располагаться на оси тележки. Хотя небольшое боковое скольжение средних и задних колес и будет иметь место, колеса катятся по одной колее и между ними нет кинематического несоответствия, а, следовательно, и не может возникнуть циркуляция мощности. По этой причине, а также из-за малости базы тележки по сравнению с L межосевой дифференциал между средней и задней осью не нужен. Для четырехосных автомобилей (ЗИЛ, МАЗ) центр поворота целесообразно располагать также на линии, проходящей посередине между неуправляемыми осями.Расчеты показывают, что у серийных образцов автомобилей λ колеблется в пределах 0,90-1,07. Прочностной расчет рулевого управления ведется с учетом конструктивных особенностей и варианта компоновки автомобиля. Расчетная нагрузка для рулевых управлений в случае отсутствия усилителей определяется: по максимально возможному окружному усилию, которое может быть приложено к ободу рулевого колеса водителем в самых трудных условиях поворота Рр max, (оно не должно превышать 50-60 кг); по величине нескомпенсированной обратной силы, которая передается от привода к рулевому колесу при неодновременном наезде управляемых колес на препятствия или при их неодинаковой интенсивности торможения. Для наиболее неблагоприятного случая, когда разница в коэффициенте сцепления под управляемыми колесами по бортам может оказаться значительной (φл = φmах, φn = 0), вся тормозная сила, развиваемая колесами, уравновешивается усилием, приложенным к рулевому колесу.
Расчетная схема поворота двухосного автомобиля. Для этого поступаем следующим образом. Графически задаемся углами β поворота внутреннего колеса (например, 10, 20, 30, 40о) и определяем из построения соответствующие им углы поворота наружного колеса α (рис. 9.4). Из теории поворота имеем выражение теоретического радиуса поворота Rт и продольной координаты L' положения центра поворота О. RТ = Вsinβ/ sin(β-α)+b, L' = (RТ – b) sin α. Расчетная схема поворота многоосного автомобиля. Чтобы автомобиль поворачивался без бокового скольжения неуправляемых колес, должно соблюдаться равенство L' = L.. Обозначим L': L = λ, тогда из формул получим λ = sinα*sinβ*B/(sin(β-α)*L). При проектировании рулевого привода трехосных автомобилей, имеющих балансирную тележку (ЗИЛ-131, Урал-375 и др.), центр поворота (О) целесообразно располагать не на оси задних колес, а на оси задней тележки. В этом случае за расчетную базу L принимается расстояние между управляемой осью и осью тележки.Необходимо добиваться, чтобы при всех углах поворота колес, особенно больших, λ было близким к единице. В этом случае центр поворота будет располагаться на оси тележки. Хотя небольшое боковое скольжение средних и задних колес и будет иметь место, колеса катятся по одной колее и между ними нет кинематического несоответствия, а, следовательно, и не может возникнуть циркуляция мощности. По этой причине, а также из-за малости базы тележки по сравнению с L межосевой дифференциал между средней и задней осью не нужен. Для четырехосных автомобилей (ЗИЛ, МАЗ) центр поворота целесообразно располагать также на линии, проходящей посередине между неуправляемыми осями.Расчеты показывают, что у серийных образцов автомобилей λ колеблется в пределах 0,90-1,07. Прочностной расчет рулевого управления ведется с учетом конструктивных особенностей и варианта компоновки автомобиля. Расчетная нагрузка для рулевых управлений в случае отсутствия усилителей определяется: по максимально возможному окружному усилию, которое может быть приложено к ободу рулевого колеса водителем в самых трудных условиях поворота Рр max, (оно не должно превышать 50-60 кг); по величине нескомпенсированной обратной силы, которая передается от привода к рулевому колесу при неодновременном наезде управляемых колес на препятствия или при их неодинаковой интенсивности торможения. Для наиболее неблагоприятного случая, когда разница в коэффициенте сцепления под управляемыми колесами по бортам может оказаться значительной (φл = φmах, φn = 0), вся тормозная сила, развиваемая колесами, уравновешивается усилием, приложенным к рулевому колесу.
«РАБОЧИЕ ПРОЦЕССЫ, КОНСТРУКЦИЯ И ОСНОВЫ РАСЧЕТА ТЕПЛОВЫХ ДВИГАТЕЛЕЙ И ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК»








