
Рис.1.7. принципиальная схема датчика высоты.
1-блок анероидных коробок, 2-передаточно-множительный механизм, 3-щетка.
Некоторые автоматические устройства на самолете нуждаются в получении входного сигнала (текущее значение высоты полета) в виде электрического напряжения. Для этих целей применяют датчики высоты. Принципиальная схема датчика высоты типа ДВ-ЗО, созданного на базе механического высотомера, приведена на рис. 1.7. В герметичный корпус датчика ДВ через штуцер подается воздух из системы статического давления. Перемещение подвижного центра блока анероидных коробок 1 с помощью передаточно-множительного механизма 2 вызывает поворот щетки 3 потенциометра П, с которого снимается напряжение Uн, пропорциональное высоте полета. Реостаты R4 и R3 служат для регулировки схемы.
В приборе ДВ-ЗО значение давления у земли вводится вручную от блока задатчика давления ЗД поворотом рукоятки р0 в центре шкалы и контролируется по указанию стрелки в пределах 640—780 мм рт. ст. При этом щетки реостатов R1 и R2, включенные последовательно с резистором Rш к источнику постоянного тока напряжением 27 В, не меняя величину падения напряжения Ua на резисторе Rш, сдвигают на равную величину потенциалы точек А и Б. Этим достигается ввод поправки в измеряемую высоту Uн в соответствии с фактическим значением давления р0.
Датчики высоты типа ДВ-15 регулируются на неизменное давление ро = 760 мм рт. ст. На оси щетки потенциометра укреплена стрелка, которая по шкале указывает значение абсолютной барометрической высоты полета.
Разновидностью датчиков высоты являются корректоры высоты (например, KB-11), которые выдают сигнал, пропорциональный отклонению высоты от заданного значения, и сигнализаторы высоты, выдающие электрический сигнал при достижении заданной высоты полета, например корректор высоты КВ-11, который широко применяется на самолетах и вертолетах гражданской авиации. Он входит в комплект многих автопилотов. Схема прибора изображена на рисунке 1.8а.
В основу работы корректора высоты положена следящая система на переменном токе. Чувствительным элементом корректора высоты является блок анероидных коробок БАК, помещенный в герметичный корпус. Внутренняя полость корпуса сообщается с системой статического давления самолета
При изменении высоты полета перемещается свободный центр анероидных коробок. Это перемещение передается на сигнальную обмотку СО индукционного датчика ИД.
В сигнальной обмотке возникает напряжение, величина которого пропорциональна перемещению, а фаза зависит от напряжения перемещения. Напряжение рассогласования с сигнальной обмотки поступает па величина которого пропорциональна перемещению, а фаза зависит от направления перемещения.усилитель, а затем на управляющую обмотку электродвигателя Д. Двигатель через редуктор перемещает обмотку возбуждения ОВ в такое положение, при котором сигнальная обмотка оказывается в среднем положении по отношению к обмотке возбуждения. При этом напряжение сигнальной обмотки становится равным нулю. Так работает корректор высоты, когда электромагнитная муфта ЭММ обесточена. В этом случае щетка потенциометра П удерживается пружинами в среднем положении и напряжение с него не снимается

Рис.1.8а.Схема корректора высоты.
При включении корректора высоты срабатывает электромагнитная муфта, и щетка потенциометра механически соединяется с выходным валом редуктора. В этом случае при отклонении самолета от заданной высоты, на которой был включен корректор высоты, с потенциометра снимается напряжение Uh, пропорциональное отклонению h высоты от заданной.
При отключении корректора высоты (выключение питания электромагнитной муфты ЭММ) пружины возвращают щетку потенциометра в среднее (исходное) положение. В приборе предусмотрены контакты К, которые включены в систему сигнализации о совмещении щетки потенциометра со средней его точкой (сигнализация готовности корректора высоты к включению).
В целях обеспечения безопасности полетов каждому самолету устанавливается определенный эшелон заданной высоты, отсчитываемый относительно уровня с p0 = 101 325 Па. Эшелоны высот двух летящих навстречу самолетов выбираются с учетом регламентированной минимальной ширины зоны безопасности, погрешностей высотомеров обоих самолетов, удвоенной аэродинамической погрешности восприятия статического давления, удвоенной погрешности стабилизации заданной высоты.
Получение сигнала, пропорционального отклонению самолета от заданной высоты, возможно с помощью корректоров высоты (рис. 1.8б). В сервопривод руля высоты СПРВ вместе с сигналами  и Uw2), пропорциональными
и Uw2), пропорциональными
отклонению угла тангажа и угло-
вой скорости wz относительно
поперечной оси самолета, от коррек-
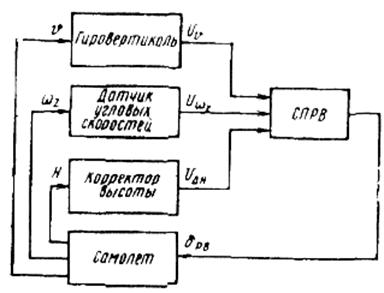
Рис. 1.8б. Схема использования корректора KB-11 в автопилоте АП-28-11
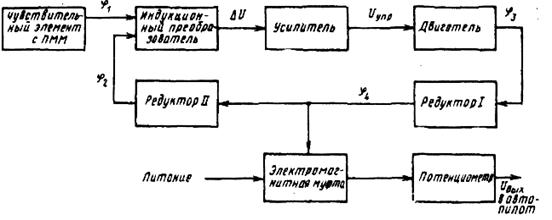
Рис. 1.8в. Функциональная схема корректора высоты типа KB
тора высоты подается сигнал  , пропорциональный отклонению от заданной высоты. Суммарное отклонение брв руля высоты определяется в этом режиме сигналами U
, пропорциональный отклонению от заданной высоты. Суммарное отклонение брв руля высоты определяется в этом режиме сигналами U  , Uwz, U
, Uwz, U  H.
H.
Применяемые в настоящее время корректоры высоты делят на корректоры высоты типа KB и корректоры-задатчики высоты типа КЗВ.
Корректор высоты типа КВ. Функциональная схема корректора представлена на рис. 1.8б. При изменении высоты перемещение жестких центров УЧЭ (анероидных коробок) через ПММ (система тяг с зубчатой парой) передается в виде угла поворота  1 на подвижную вторичную обмотку индукционного преобразователя. Первичная обмотка индукционного преобразователя с помощью двигателя и редукторов / и // поворачивается относительно вторичной обмотки. При отклонении самолета от заданной высоты на величину H сигнал U пропорциональный этому отклонению, с фазой, соответствующей знаку отклонения, поступает на вход усилителя. С выхода усилителя сигнал U упр поступает на управляющие обмотки электродвигателя, который через два редуктора поворачивает на угол 2 первичную обмотку индукционного преобразователя до отработки угла рассогласования (до равенства 1= 2).
1 на подвижную вторичную обмотку индукционного преобразователя. Первичная обмотка индукционного преобразователя с помощью двигателя и редукторов / и // поворачивается относительно вторичной обмотки. При отклонении самолета от заданной высоты на величину H сигнал U пропорциональный этому отклонению, с фазой, соответствующей знаку отклонения, поступает на вход усилителя. С выхода усилителя сигнал U упр поступает на управляющие обмотки электродвигателя, который через два редуктора поворачивает на угол 2 первичную обмотку индукционного преобразователя до отработки угла рассогласования (до равенства 1= 2).
В работе корректора типа KB различают режимы согласования и коррекции. В режиме согласования электромагнитная муфта отключена, центрирующие пружины удерживают щетку потенциометра на средней нулевой точке, и поэтому выходной сигнал корректора отсутствует. Включением муфты в режиме коррекции обеспечивается передача угла поворота 4 выходной оси редуктора 1 щетке потенциометра, выходной сигнал Uвых которого пропорционален по величине и фазе отклонению высоты от заданного значения. При выключении муфты пружины возвращают щетку потенциометра в среднее (нулевое) положение.
В электрической схеме корректора высоты (рис. 1.8г) полупроводниковый усилитель следящей системы двухкаскадный с трансформаторной связью между каскадами. Первый каскад на базе транзистора VI
является каскадом усиления напряжения. Второй каскад собран по двухтактной схеме на транзисторах V2, V3 и является каскадом усиления мощности. Нагрузкой его служат управляющие обмотки электродвигателя М (ДИД-0,5). Выходной сигнал корректора высоты снимается с потенциометра ПКВ. Контакт НК сигнализатора готовности размыкается при смещении щетки потенциометра ПКВ от среднего (нулевого) положения. На схеме показаны цепи подключения индукционного преобразователя ИП и электромагнитной муфты ЭМ, а также штепсельный разъем ШР, с помощью которого осуществляется съем выходных сигналов.
Конструктивно корректор высоты типа KB состоит из четырех узлов: полупроводникового усилителя на плате, электродвигателя с редуктором, электромагнитной муфты с потенциометром и чувствительного элемента с индукционным преобразователем. Все узлы крепятся на одном основании и закрываются кожухом.
Корректор-задатчик высоты типа КВ. Он предназначен для выдачи сигналов в виде напряжений постоянного и переменного тока частотой 400 Гц, пропорциональных отклонению Н самолета от задан-

Рис. 1.8г. Принципиальная электрическая схема корректора высоты типа KB
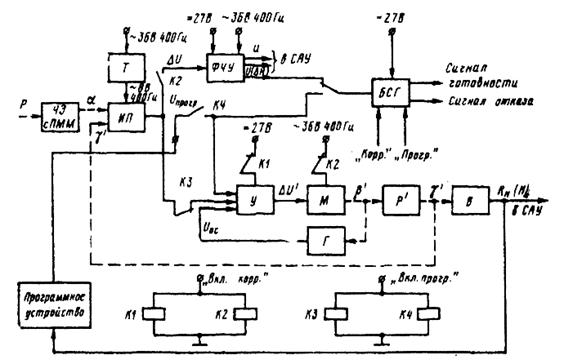
Рис. 1.8д. Функциональная схема корректора-задатчика высоты типа КЗВ
ной высоты полета (в режимах коррекции и работы от программного устройства) и относительного сопротивления, пропорционального абсолютной высоте полета (в режиме обнуления).
Корректор типа КЗВ работает в комплекте с блоком сигнала готовности БСГ, предназначенным для выдачи сигнала готовности к включению в режиме обнуления и выдачи сигналов исправности или отказа в режимах коррекции и программного управления. В блок БСГ вводятся: выходное напряжение переменного тока частотой 400 Гц с корректора, управляющие сигналы + 27 В при включении в режимы коррекции и работы с программным устройством.
На функциональной схеме корректора типа КЗВ (рис. 1.8д) показаны: чувствительный элемент ЧЭ с ПММ; индукционный преобразователь ИП; трансформатор Т, фазочувствительный усилитель ФЧУ, полупроводниковый усилитель У, двигатель М, генератор скоростной обратной связи Г, редуктор Р; узел потенциометров В; блок БСГ; реле К1 и К2, включающие режим коррекции; реле КЗ и К4, включающие режим «Программа».
В каналах взаимосвязей обозначены: угол поворота  выходной оси ПММ, напряжения и переменного и U постоянного тока, пропорциональные изменению высоты Н; усиленное напряжение рассогласования U'; угол у' поворота редуктора; угол
выходной оси ПММ, напряжения и переменного и U постоянного тока, пропорциональные изменению высоты Н; усиленное напряжение рассогласования U'; угол у' поворота редуктора; угол  ' поворота вала двигателя; выходное сопротивление Rn потенциометра В; команда в виде напряжения постоянного тока Uпрогр с программного устройства.
' поворота вала двигателя; выходное сопротивление Rn потенциометра В; команда в виде напряжения постоянного тока Uпрогр с программного устройства.
Режим обнуления является подготовительным для включения корректора в режим коррекции. Входное давление р воспринимается ЧЭ. Элемент ИП преобразует перемещение жесткого центра ЧЭ в напряжение U, которое после усилителя У поступает на управляющую обмотку двигателя М. Двигатель через редуктор Р' поворачивает щетки узла потенциометров В. Выходное сопротивление Rн будет пропорционально высоте H. Одновременно двигатель через редуктор Р' поворачивает сердечник ИП, пока напряжение U не станет равным нулю. Двигатель М остановится.
В режим коррекции корректор КЗВ включается оператором или программным устройством после того, как достигнута высота стабилизации. В этом режиме питание элементов У и М отключается с помощью реле K1 и К2. Сигнал рассогласования U не обнуляется и существует, пока не будет достигнуто стабилизируемое значение высоты. Этот сигнал подается на усилитель ФЧУ, который выдает потребителям сигналы в виде напряжений Uи u.
В режиме работы от программного устройства корректор КЗВ позволяет доводить высоту полета до высоты, заданной специальной программой. Это достигается отработкой положения сердечника ИП механизмом корректора в соответствии с программой. Реле КЗ и К4 отключают элемент ИП от усилителя У и подключают программное устройство. Потенциометр программного устройства (на схеме не показан) совместно с потенциометром В образуют мостовую схему, выходной сигнал с которой поступает на усилитель У.
Чувствительным элементом корректора типа КЗВ (рис. 1.8е) является анероидная коробка с линейной зависимостью деформации от высоты. Подвижной жесткий центр O1 коробки через термокомпенсатор БМ и тяги T1 и Т2 взаимодействует с якорем Я индукционного преобразователя ИП. Сердечник преобразователя представляет собой Ш-образный магнитопровод. Обмотка возбуждения 0В размещена на среднем стержне сердечника, встречно включенные вторичные обмотки ВО — на крайних стержнях. Ось 02 якоря и сердечник С преобразователя ИП неподвижно укреплены на основании К, к которому жестко крепится червячная шестерня ЧШ с центром вращения 03. Биметаллическая скоба БМ осуществляет термокомпенсацию первого и второго родов.Двигатель М. служит для отработки преобразователя ИП в согласованное положение, когда зазоры  и
и  , между якорем Я и сердечником С будут равны. Усилитель У низкой частоты трехкаскадный с трансформаторной связью между каскадами. Первый каскад выполнен по схеме эмиттерного повторителя. Второй и третий каскады выполняются по двухтактной схеме.
, между якорем Я и сердечником С будут равны. Усилитель У низкой частоты трехкаскадный с трансформаторной связью между каскадами. Первый каскад выполнен по схеме эмиттерного повторителя. Второй и третий каскады выполняются по двухтактной схеме.
Усилитель ФЧУ в режиме выдачи сигнала переменного тока двухтактный двухкаскадный с трансформаторным выходом. В режиме выдачи сигнала постоянного тока он представляет собой сочетание двухтактного двух каскадного усилителя с полупроводниковым фазочувст-вительным выпрямителем, снабженным RC-фидером.
В блоке БСГ сигнал переменного тока частотой 400 Гц с выхода корректора поступает в усилитель-реле, где усиливается по двухтактной схеме усиления, выпрямляется, сглаживается емкостным фильтром и в отрицательной полярности поступает на несимметричный триггер с одним устойчивым состоянием, нагруженный на обмотку реле. Когда напряжение достаточно (при неисправности корректора) для опрокидывания триггера, последний перейдет из устойчивого состояния, при котором обмотка реле находилась под током, в неустойчивое. Обмотка реле обесточится и выдаст своей контактной группой сигнал «Отказ».

Рис. 1.8е. Кинематическая схема корректора-задатчика высоты типа КЗВ
Конструктивно корректор КЗВ выполнен в виде механизма отработки, закрытого кожухом. В него входит ряд узлов, собранных на платах (ЧЭ с ПММ, ИП, усилитель, червячная пара, трансформатор, потенциометр и т. ст.). Блок БСГ с усилителем-реле выполнен в виде отдельного блока.
Погрешности корректоров высоты. Они аналогичны погрешностям электромеханических высотомеров. При выходе из строя отдельных элементов корректора высоты или обрыве в проводах возникают неисправности. Так, обрыв проводов в индукционном преобразователе ИП или в жгуте, подводящем питание, приводит к отсутствию выходных напряжении корректора. При неисправности реле К1 и К2 (см. рис. 1.8д) подача напряжения Ч-27 В не приводит к включению режима коррекции, а при неисправности реле КЗ и К4 — режима «Программа». Выход из строя усилителя У или двигателя М приводит к неисправности системы отработки корректора. Отказ усилителя-реле блоке БСГ приводит к тому, что в режимах «Коррекция» и «Программa» отсутствует сигнал готовности. Загрязнение штуцера, редуктора или затирание в осях подвижной системы может явиться причиной медленной отработки корректора высоты. При выходе из строя элементы заменяют на исправные.








