Более совершенными гироскопическими курсовыми приборами по сравнению с ГПК-48 являются рирополукомпасы типа ГПК-52 и ГПК-52АП.
Гирополукомпас ГПК-52АП отличается от ГПК-52 тем, что он имеет, кроме шкалы визуального съема показаний, возможности выдачи электрического сигнала курса, который может быть использован другими системами, например, автопилотом.
Гирополукомпас ГПК-52АП предназначен для длительного выдерживания заданного курса по ортодромии и совершения точных разворотов.
В отличие от ГПК-48 гирополукомпас ГПК-52АП автоматически выдерживает ортодромический курс, что достигается прецессией гироскопа по оси внешней рамы карданова подвеса (см. разд. 7. 4) со скоростью

Таким образом осуществляется компенсация ухода гироскопа из-за суточного вращения Земли.
Комплект гирополукомпаса ГПК-52АП состоит из собственно гирополукомпаса ГПК-52АП, пульта управления 52ПУ и указателей, которых может быть несколько.
Рассмотрим принципиальную схему гирополукомпаса ГПК-52АП (рис. 8.3).
Внешняя ось карданова подвеса гироскопа устанавливается на самолете вертикально. Главная ось гироскопа 3 удерживается в плоскости горизонта с помощью горизонтальной системы коррекции, куда входят: однокоординатный электролитический маятник 12 и датчик момента или коррекционный двигатель /. Контакт 13 нормально замкнут и размыкается при помощи выключателя коррекции. Подробно работа горизонтальной коррекции рассмотрена в разд. 3. 3 при описании авиагоризонтов. Отметим только то, что при отклонении оси гироскопа от плоскости горизонта с электролитического маятника 12 снимается сигнал, который управляет моментом коррекционного двигателя 1. Под действием этого момента ось гироскопа возвращается в плоскость горизонта. При разворотах самолета контакт 13 размыкается с помощью выключателя коррекции (см. разд. 4.4), так как электролитический маятник при действии ускорений работает с большими погрешностями.
Азимутальная коррекция осуществляется с помощью системы, содержащей двигатель-корректор 11, ротор которого жестко связан с внутренней осью карданова подвеса, астатор закреплен на внешней раме подвеса, и два потенциометра 9 и 10. Потенциометр 9 называется широтным, с него снимается сигнал, пропорциональный величине ω3 sin φ.
Под действием этого сигнала гироскоп прецессирует по оси внешней рамы со скоростью. 
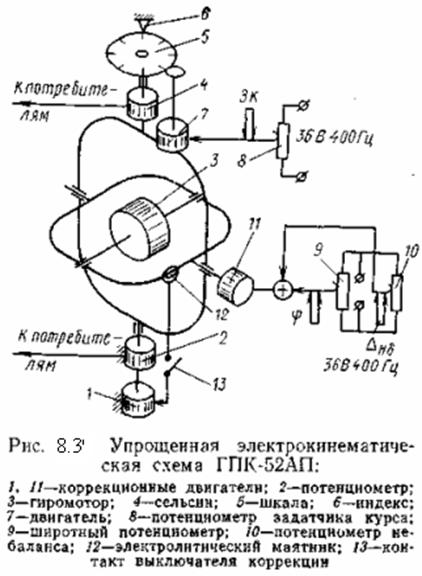
В то же время на двигатель-корректор 11 поступает сигнал с потенциометра 10, который называется поправочным. Он служит для формирования электрического сигнала, который, поступая на двигатель-корректор, заставляет гироскоп прецессировать со скоростью, равной скорости собственного ухода гироскопа по внешней оси, но противоположной по знаку. Поскольку собственный уход гироскопа — величина случайная, зависящая от многих факторов, удается скомпенсировать только постоянную составляющую этого ухода, которая, как правило, обусловлена остаточной несбалансированностью гироскопа. Поэтому иногда потенциометр 10 называют потенциометром небаланса.
Отсчет курса производится по индексу 6, нанесенному на неподвижную часть прибора, и шкале 5, связанной с внешней рамой карданова подвеса через редуктор и двигатель 7. При разворотах самолета индекс перемещается относительно шкалы, пилот воспринимает подвижной шкалу. Потребители получают курс от ГПК-52 с потенциометра 2 и сельсина 4.
Двигатель 7, управляемый потенциометром 8 задатчика курса, служит для установки шкалы на заданный курс, причем при работе двигателя поворачивается только шкала, а гироскоп неподвижен.
Потенциометры 8, 9, 10 расположены в пульте управления полукомпасом.
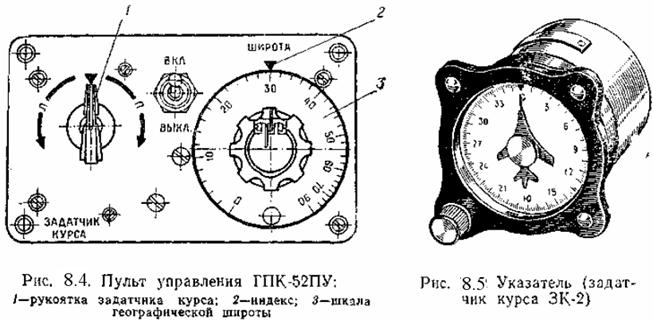
Поворотом рукоятки 1 задатчика курса вправо или влево шкала компаса приводится во вращение (рис. 8.4). Причем с увеличением угла отклонения рукоятки от нулевого положения возрастает угловая скорость шкалы, которая может быть порядка 25 — 180 град/мин.
Установка широты осуществляется по индексу 2 и шкале 3, проградуированной по закону синуса, в результате чего потенциометр применяется линейный.
Указатель, он же является и задатчиком курса, когда прибор работает в комплекте с автопилотом, связан с ГПК-52АП по схеме, изображенной на рис. 8.6. Внешний вид указателя (задатчика курса ЗК-2) показан на рис. 8.5.
Индицируемый курс передается в указатель с помощью сельсинной следящей системы, состоящей из сельсина-приемника 1, ротор которого жестко связан с внешней осью карданова подвеса, сельсина-датчика 2, усилителя 7, двигателя 6 и редуктора 3, находящихся в указателе. При разворотах самолета следящая система отрабатывает рассогласование между ротором и статором сельсина 1, поворачивая силуэт самолета 5 относительно шкалы прибора.
При работе ГПК-52АП в комплекте с автопилотом с помощью кремальеры по шкале прибора и неподвижному индексу можно задать необходимый курс. При этом разворачивается статор сельсина-датчика 2 относительно ротора. Следящая система, отрабатывая это рассогласование, разворачивает силуэт самолета относительно шкалы прибора и неподвижного индекса, одновременно посылая сигнал на разворот с потенциометра 4 в автопилот. С помощью автопилота самолет развернется на угол, заданный потенциометром 4, а следящая система, реагируя на разворот самолета, вернет силуэт самолета 5 в положение, при котором он совпадет с неподвижным индексом и по шкале покажет курс полета. Такая индикация является удобной при выдерживании курса.

Следует, однако, заметить, что при задании курса кремальерой в начальный момент силуэт самолета может разворачиваться в сторону, противоположную развороту самолета, а потом уже начнет двигаться в сторону разворота самолета. Это объясняется тем, что располагаемая скорость отработки следящей системы больше скорости разворота самолета по курсу.








