

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...
Топ:
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Интересное:
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Курсовая система (рис. 9. 1) состоит из ряда датчиков (магнитного, гироскопического, астрономического и радиотехнического), измеряющих соответственно курсы ψМ, ψГ, ψа, ψР Каждый из датчиков в зависимости от условий полета, включается поочередно переключателем П на общий индикатор курса И. При этом соблюдается принцип: включается тот датчик, который в данных условиях имеет наименьшие погрешности.

Особенности этой схемы курсовой системы — отсутствие взаимосвязи между датчиками и передача погрешности каждого из них целиком на индикатор.
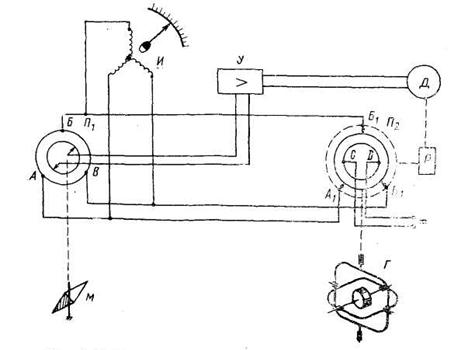
Рис 9.2 К пояснению принципа работы курсовой системы.
Раздельное использование датчиков не позволяет извлечь из такой системы никаких преимуществ, кроме экономии на индикаторах. Схема курсовой системы, в которой осуществляется взаимная связь датчиков курса корректирующими звеньями, более совершенна. По такой схеме построены курсовые системы ГИК-1, ТКС-П, КС-6 и др.
Рассмотрим принцип работы схемы на следующем примере.
Пусть на самолете установлен магнитный компас М (рис. 9.2), который на схеме показан в виде магнитной стрелки, и курсовой гироскоп Г. С магнитной стрелкой жестко связаны щетки потенциометра П4, сам потенциометр связан с самолетом. Внешняя ось карданова подвеса гироскопа жестко соединена с потенциометром П2, щетки которого могут поворачиваться двигателем Д через редуктор Р. Двигатель управляется усилителем У, сигнал на вход которого поступает со щеток потенциометра П). Потенциометры П4 и П2 связаны между собой тремя проводами. Параллельно потенциометрам подключен трех катушечный логометрический указатель И.
Очевидно, эту схему можно рассматривать как следящую систему, у которой входными величинами будут магнитный и гироскопический курсы, а выходной величиной ψгм— показание индикатора.
Предположим, что в некоторый момент система находится в таком положении, когда электрические потенциалы точек А, Б, В потенциометра П1равны потенциалам точек А1 Б1, В1потенциометра П2. В этом случае напряжение на входе усилителя равно нулю и двигатель не работает. Стрелка индикатора благодаря постоянным потенциалам на концах логометрических катушек установилась на определенном делении шкалы.
Допустим, что самолет развернулся по курсу на некоторый угол ψ. Если считать магнитный датчик и курсовой гироскоп идеальными приборами — измерителями курса, то щетки потенциометров П1 и П2 повернутся относительно самолета на тот же угол. Это не нарушит сбалансированного состояния потенциометров П1 П2 и двигатель Д останется в покое. В то же время потенциалы точек A1 Б1 В1 изменятся, поскольку нарушилось пространственное положение щеток потенциометра П2 относительно точек подвода питания С, Д.
Вследствие этого изменятся потенциалы точек А, Б, В потенциометра П1 и, главное, потенциалы на концах катушек логометра, что приведет к повороту стрелки индикатора на угол ψ.
Рассмотрим теперь случай, когда из-за особенностей конструкции магнитного компаса в полете могут возникнуть колебания магнитной стрелки, например, за счет вибраций самолета.
Потенциалы точек А, Б, В постоянны; они могут измениться только в зависимости от потенциалов А1 Б1 В1потенциометра П2, со щеток же потенциометра П1 снимается некоторое напряжение, так как они изменили пространственное положение относительно точек А, Б, В. Напряжение, снимаемое со щеток П1 усиленное в усилителе, заставит двигатель через редуктор повернуть щетки А1 Б1 В1 потенциометра П2 в положение, при котором потенциометры опять окажутся согласованными. Естественно, что новое сбалансированное положение потенциометров приведет к изменению потенциалов в катушках логометра и повороту стрелки указателя. Такой процесс произошел бы, если располагаемая скорость отработки следящей системы, в которую входят потенциометр П1 усилитель, двигатель, редуктор, потенциометр П2, была бы равна скорости колебания магнитной стрелки. В этом случае стрелка указателя повторяет колебания магнитной стрелки. Когда скорость отработки следящей системы меньше, чем скорость колебания магнитной стрелки, что достигается в основном выбором передаточного числа редуктора, то следящая система не успевает отрабатывать колебания магнитной стрелки на указателе и стрелка оказывается неподвижной.

Рис 9.3 структурная схема курсовой системы
Таким образом, с помощью указанной схемы можно отфильтровывать, сглаживать высокочастотные колебания магнитного датчика. В этом проявляется положительное влияние гироскопического датчика на магнитный при их совместной работе.
С другой стороны, курсовой гироскоп, как известно, имеет собственный уход в азимуте с небольшой скоростью. В результате этого ухода изменяются потенциалы точек А1 Б1 В1потенциометра П2, так как нарушается взаимное положение точек С, Д и А1 Б1 В1. Показания индикатора должны бы также измениться. Однако это не произойдет, так как при изменении потенциалов точек А1 Б1 В1изменятся потенциалы точек А, Б, С. На усилитель поступит сигнал, который заставит двигатель повернуть щетки потенциометра П2 в положение, при котором потенциалы точек А, Б, В и А1 Б1 С1 будут прежними. Все сказанное справедливо, если скорость отработки следящей системы будет не меньше скорости ухода гироскопа. Следовательно, в схеме собственный уход гироскопа компенсируется и не влияет на показания индикатора. В этом проявляется положительное влияние магнитного датчика курса на гироскопический.
Таким образом, рассмотрение качественной картины работы схемы комплексирования магнитного и гироскопического датчиков курса показывает, что при рациональном выборе параметров, в частности, скорости отработки следящей системы, можно добиться высокой точности измерения курса.
Определим погрешность курсовой системы, пользуясь ее структурной схемой (рис. 9.3). Магнитный компас (астрокомпас или другой датчик курса) соединяется с курсовым гироскопом через звено с передаточной функцией

где 1/Т – коэффициент усиления звена, Т – постоянная времени звена.
Постоянная времени звена зависит от передаточного коэффициента потенциометра kп (В/рад); коэффициента усиления усилителя kу; коэффициента усиления двигателя (интегрирующее звено) kД (рад/с); передаточного числа редуктора k p следующим образом:
 |
Погрешность Δψк включает методические и инструментальные погрешности магнитного датчика, в основном быстроменяющиеся.
Погрешность Δψг включает собственный уход гироскопа в азимуте, кардановую погрешность и другие погрешности в основном медленноменяющиеся.
Естественно, что при погрешностях входных сигналов в выходном сигнале тоже будет погрешность Δψвых, которую можно определить следующим образом.
Исходя из структурной схемы выходной сигнал можно записать
в виде 
Раскрывая скобки и делая необходимые преобразования, получаем
 |

где W (р)к=  — передаточная функция курсовой системы
— передаточная функция курсовой системы
для погрешностей магнитного компаса; W (р)Г= - точная функция курсовой системы для погрешностей курсового гироскопа.
Из сказанного следует, что для погрешностей магнитного датчика курсовая система ведет себя как инерционное звено с большой постоянной времени Т, которая для современных курсовых систем
равна 70—220 с.
Известно, что выражение для амплитудно-частотной характеристики инерционного звена
 |
где ω — частота помехи.
Из уравнения (9.7) видно, что когда ω→∞, то А(ω)к→0, поэтому погрешность ΔψK в выходном сигнале при возрастании ω уменьшается.
При погрешностях гироскопа курсовая система ведет себя как форсирующее звено. Амплитудно-частотная характеристика такого звена определяется выражением

из которого видно, что при возрастании частоты погрешностей курсового гироскопа ω→∞, А(ω)г→1, ошибка в выходном сигнале от курсового гироскопа стремится к величине Δψг, а при малых со ошибка курсового гироскопа не сказывается на погрешности выходного сигнала.
Учитывая полученные зависимости для ошибки курсовой системы, можно сделать следующее заключение.
1. Короткопериодические (быстроменяющиеся) погрешности
магнитного датчика или астрокомпаса курсовой системы подавляются и на указатель практически не пропускаются.
2. Медленноменяющиеся погрешности курсового гироскопа (уход в азимуте) на точности выходного курса не сказываются.
3. Постоянные погрешности, такие, как девиационные, схемой
курсовой системы не компенсируются, поэтому их нужно уменьшать
другими способами.
4. Периодические быстроменяющиеся погрешности курсового
гироскопа схемой курсовой системы не уничтожаются и для их компенсации нужно принимать особые меры.
|
|
|

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
© cyberpedia.su 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

