С увеличением скорости и высоты полета возникла необходимость в учете новых факторов, влияющих на точность измерения этих параметров в полете. При больших скоростях полета, например, необходимо учитывать температуру торможения (заторможенного) воздушного потока и изменение плотности воздуха вследствие его сжимаемости. Эти факторы могут быть учтены с помощью вычислительных устройств. Такие устройства из-за сложности можно применять только в измерительных системах, а не в отдельных приборах.
Система воздушных сигналов СВС-ПН-15-4(далее по тексту СВС) представляет собой электромеханическое счетно-решающее устройство непрерывного действия. Она предназначена для одновременного измерения истинной воздушной скорости V, числа М, относительной высоты полета Н отн, абсолютной барометрической высоты полета Н абс и выдачи в бортовые системы пилотирования и навигации соответствующих сигналов в виде сопротивлений и напряжений.
Система воздушных сигналов СВС-ПН-15-4 преднаначена для измерения следующих параметров:
-числа М
-истинной воздушной скорости
-относительной барометрической высоты
-отклонения числа М от заданного значения
-отклонение истинной бпрометрической высоты от заданного значения
Для информации членов экипажа о режиме полёта самолёта система воздушных сигналов СВС-ПН-15-4 обепечивает визуальную индикацию истинной воздушной скорости, числа М и относительной высоты, кроме того СВС имеет связь с доплеровским измерителем скорости и сноса (ДИСС). Это позволяет визуально отсчитывать путевую скорость.
СВС-ПН-15-4 также выдаёт сигналы измеряемых параметров:
А) в навигационное вычислительное устройство НВУ-Б3 – истинную воздушную скорость для счисления пути
Б) в самолётные ответчики СОМ-65 и СО-70 – абсолютную и относительную высоту для контроля эшелонирования полёта службами УВД.
В) в автоматическую бортовую систему управления АБСУ-154 – сигналы отклонения от заданной приборной скорости, числа М для стабилизации режимов полёта по этим величинам.
Сигнл температуры воздуха в СВС-ПН-15-4 поступает от приёмников П-5, установленных на борту.
Число М измеряется в диапазоне 0,3-1 с погрешностью:
На земле._______________________________________________±0,02
На высоте 1-15км_________________________________________±0,01
Истинная воздушная скорость измеряется в диапазоне 200-1200км/ч с погрешностью
При скорости 200-400км/ч_______________________________±25км/ч
При скорости более 400км/ч______________________________±12км/ч
Относительная высота___________________________________0-15км
Абсолютная высота_____________________________________-0,5-15км
Погрешность измерения высоты:
На земле_______________________________________________±10м
На высоте 0,5км_________________________________________±15м
На высоте 1км__________________________________________±20м
На высоте 2км__________________________________________±30м
На высоте 3км__________________________________________±40м
На высоте более 3км_____________________________________±50м
Указатель скорости обеспечивает показания путевой скорости по данным ДИСС-3П с погрешностью ±10км/ч.
Время готовности системы СВС 15 минут после включения питания при температре 0оС и 30 минут при отрицательных температурах. В системе предусмотрен встроенный контроль. Для включения встроенного контроля неоходимо на указателе УВО-15 установить кремальерой стрелку отсчета высоты на ноль и на верхнем электрощитке нажать кнопку «контроль СВС», при этом на индикаторах отображаются значения:
Высота_____________________________________________500±25м
Число М____________________________________________0,4±0,03
Истинная воздушная скорость__________________________500±20км/ч
Если с помощью системы встроенного контроля в системе обнаружена неисправность, то её находят и проверяют на соотверствие нормам технических параметров с помощью установки АП-СВС-2. При замене блоков ВСМВ-1-15 и КЗВ-0,15 необходимо отсоединить дюритовые шланги полного и статического давления от снимаемого блока, установить заглушки на отверстия и закрыть штуцеры.
Мощность потребляемая системой не привышает:
От сети переменного тока 115в_________________________350ВА
От сети постоянного тока 27в__________________________150Вт
От сети переменного тока 36 в_________________________180ВА
Масса системы не привышает _________________________67кг
Система СВС состоитиз блоков размещенных на самолёте следующим образом. Вычислитель скорости, числа М и высотыВСМВ-1-15 установлен в первом техническом отсеке, по правому борту между шпангоутами 11-12. Потенциометрические блоки преобразования абсолютной высоты БПнП-2, относительной высоты БПнП-4 и истинной воздушной скорости БПнП-10 и блок питания БП-27-2 установлен по правому борту между шпангоутами 9-10. Фильтр напряжения питания Ф-115-1 установлен по правому борту между шпангоутами 8-9. Блок коррекции БКМЭ для выдачи сигнала отклонения от заданного числа М установлен по правому борту между шпангоутами 10-11. Три блока сигнализации готовности БСГ установлены в первом техническом отсеке на стенке шпангоута 14. Три корректора заданной высотыКЗВ-0-15 для выдачи сигналов абсолютной высоты и сигналов отклонения от заданной высотыустановлены на этажерке под полом между шпангоутами 27-28 по левому борту.
При вычислении высоты, скорости и числа М в качестве независимых переменных используются такие параметры, как статическое давление р, полное давление р п и температура торможения Т т. В расчетных формулах встречаются некоторые общие закономерности, связывающие независимые параметры с измеряемыми — высотой, скоростью и числом М. Эта общность в закономерностях и положена в основу построения систем воздушных сигналов.
Абсолютная барометрическая высота Набс определяется по формуле Лапласа
 (2.6)
(2.6)
где R — газовая постоянная; т — коэффициент перевода натуральных логарифмов в десятичные; Т ср — средняя температура столба воздуха от поверхности земли до высоты Н; р0 — давление, равное 760 мм рт. ст; р — статическое давление на высоте Н.
Среднюю температуру воздуха определяют по формулам:
а) для высоты Н < Н11
 (2.7)
(2.7)
б) для высоты Н > Н11
 (2.8)
(2.8)
где Т0, Т11 и Т — абсолютная температура соответственно у поверхности земли, на высоте 11 км и на высоте Н; Н11 — высота 11 км. Относительную барометрическую высоту Н отн определяют по формуле
 (2.9)
(2.9)
где Н З —барометрическая высота заданного уровня с давлением р 3 относительно уровня с давлением р0 =760 мм рт. ст.
Число М для дозвуковых скоростей полета выражается формулой
 (2.10)
(2.10)
Истинную воздушную скорость V определяют из соотношения
 (2.11)
(2.11)
где 
Из расчетных формул (2,6), (2.10) и (2.11) следует, что для определения выходных параметров необходимо измерить статическое давление р,полное давление р пи температуру Т тзаторможенного потока, а затем произвести ряд математических операций.
На рис. 2.23 представлена функциональная схема системы воздушных сигналов.
Уравнения (2,6), (2.10) и (2.11) решаются в вычислителе скорости, числа М и высоты (ВСМВ). В этот вычислитель непрерывно вводятся статическое р
и полное р пдавления и температура Т т. Давление р 3 заданного уровня вводится вручную.
Вычислитель ВСМВ непрерывно определяет параметры Н абс, Н отн, V и М на основании вводимых значений р, р п, р З и Т т. С вычислителя сигналы поступают на блоки преобразований БПНП(блок преобразования напряжения потенциометрический) и через блоки питания и усиления БПУ на указатели: высоты — УВО, числа М —УМ и скорости —УСВП. Кроме того, сигнал числа М поступает в блок коррекции числа М (БКМ).
Указатели УВО, УМ и УСВП позволяют визуально отсчитывать соответствующие нилотажно-навигационные параметры. На левом указателе УВО вручную задается давление р 3, контролируемое по соответствующему счетчику, расположенному на лицевой стороне прибора. Указатель УСВП (указатель скорости воздушной, путевой) может быть подключен к вычислителю ВСМВ или доплеровскому измерителю скорости и сноса ДИСС. В первом случае он будет показывать истинную воздушную скорость, а во втором случае — путевую. Переключение указателя УСВП на ВСМВ или на ДИСС производится переключателем, расположенным на указателе. При достижении критического числа М с левого указателя УМ выдается сигнал «Опасно» в виде напряжения 27 В постоянного тока.
Блок коррекции числа М служит для выдачи сигнала, пропорционального отклонению ΔМ числа М от заданного значения. Этот сигнал поступает в автоматическую систему управления самолета.
Потенциометрические блоки БПНП предназначены для преобразования поступающих от вычислителя ВСМВ сигналов в виде напряжений переменного тока, пропорциональных Н абс, Н отн и V, в сигналы в виде сопротивлений.
В комплект СВС входит корректор-задатчик высоты КЗВ с блоком сигнализации готовности БСГ. Эти два блока работают самостоятельно и не связаны с вычислителем ВСМВ. В блок КЗВ непрерывно подается статическое давление, и в нем вырабатывается сигнал в виде напряжения, пропорционального высоте Н абс, а при включенной коррекции, кроме того, вырабатывается и выдается в систему автоматического управления сигнал, пропорциональный отклонению высоты от заданной.
Блок БСГ служит для сигнализации готовности к работе корректора высоты.

Рис.2.23. функциональная схема системы воздушных сигналов.
Рассмотрим принцип действия СВС на примере канала высоты, в котором решается зависимость между статическим давлением и барометрической высотой. Функциональная схема канала высоты представлена на рис. 2.24.
В системе СВС для измерения статического давления и преобразования его в соответствующий электрический сигнал применен индукционный датчик статического давления ДДСИ (датчик давления статического индукционный). Чувствительным элементом в этом датчике служит блок анероидных коробок, а преобразовательным устройством — индукционный датчик.
Блок анероидных коробок имеет характеристики, близкие к логарифмическим, а характеристика индукционного датчика практически линейна. Поэтому напряжение на выходе датчика статического давления имеет характеристику, близкую к логарифмической. Это напряжение суммируется с напряжением аэродинамической поправки, которое вырабатывается в блоке коррекции БК. Суммарное напряжение подается на вход усилителя У1
 Рис 2.24. Функциональная схема канала высоты СВС.
Рис 2.24. Функциональная схема канала высоты СВС.
Усиленное в усилителе напряжение подается на вход функционального преобразователя напряжений ПНФ, в котором выходное напряжение изменяется по определенному закону в зависимости от входного.
Скорректированное в ПНФ напряжение, пропорциональное абсолютной барометрической высоте Н абс, подается в подканалы Н абс и Н отн соответственно на входы усилителей У2 и У3. Одновременно на вход усилителя У3 с указателя УВО поступает напряжение, пропорциональное высоте Н 3 заданного уровня. Напряжение, пропорциональное относительной высоте, с выхода усилителя У3 через выходной трансформатор Тр1 подается в указатель УВО и в блок БПНП-4 (блок относительной высоты). Напряжение, пропорциональное высоте Н абс, с выхода усилителя У2 подается в блок преобразования напряжения БПНП-2.
На рис. 2.25 представлена принципиальная схема указателя относительной высоты УВО и показана его связь с выходным трансформатором Тр1 канала высоты.
Указатель УВО представляет собой прибор, состоящий из двух самостоятельных каналов: канала отработки и индикации относительной барометрической высоты Н отн канала ввода высоты Н 3 как функции давления р 3на заданном уровне.
Работа канала относительной высоты основана на преобразовании электрического сигнала, пропорционального Н отн, в механическое перемещение стрелки и счетчика высоты отсчетного устройства указателя с помощью следящей системы, работающей по принципу самоуравновешивающегося моста переменного тока.
Электрический сигнал, пропорциональный высоте Н отн поступает в указатель со вторичной обмотки трансформатора Тр1 в виде напряжения U1. В указателе это напряжение сравнивается с напряжением U2 снимаемым с диагонали вг мостовой схемы. К диагонали аб этой мостовой схемы подводится опорное напряжение U оп.Напряжения U1 и U2 находятся в противофазе.
Напряжение, подаваемое на вход усилителя БПУ, равно разности напряжений U1 и U2, т. е. U вх= U1 — U2. В установившемся режиме (при постоянной высоте полета) напряжения U1 и U2 равны, следовательно, U вх =0. В случае изменения высоты полета с выхода усилителя БПУ на управляющую обмотку двигателя Д поступает напряжение. Двигатель через редуктор Ред1 будет перемещать щетку потенциометра П2 в направлении выравнивания напряжения U2 с напряжением U1. Одновременно двигатель через редуктор перемещает стрелку и счетчик отсчетного устройства высоты.

Рис.2.25 принципиальная схема указателя УВО
Ввод высоты Н 3 осуществляется поворотом рукоятки, расположенной на лицевой стороне прибора. Поворот рукоятки через редуктор Ред2 передается на щетку потенциометра П1 и одновременно на счетчик р 3.С потенциометра П1 снимается напряжение U 3, пропорциональное высоте Н 3.Это напряжение подается в канал высоты Н отн, на вход усилителя У3 (см. рис. 2.25).
На рис. 2.26 представлена принципиальная схема блока преобразования напряжения БПНП-4 и показана его связь с выходным трансформатором Tpl канала высоты.
Блок БПНП-4 представляет собой электромеханическое устройство, работающее по принципу самобалансирующейся компенсационной схемы.
Напряжение U1,пропорциональное относительной высоте Н отн, поступает на вход блока преобразования со вторичной обмотки трансформатора Tpl. В блоке преобразования это напряжение сравнивается с напряжением U2 которое снимается с диагонали вг мостовой схемы. К диагонали аб мостовой схемы подводится опорное напряжение U оп. На вход усилителя У подается напряжение, равное разности напряжений U1 и U2.

Рис.2.26. принципиальная схема блока преобразования напряжения.
Напряжение U1,пропорциональное относительной высоте Н отн, поступает на вход блока преобразования со вторичной обмотки трансформатора Tpl. В блоке преобразования это напряжение сравнивается с напряжением U2 которое снимается с диагонали вг мостовой схемы. К диагонали аб мостовой схемы подводится опорное напряжение U оп. На вход усилителя У подается напряжение, равное разности напряжений U1 и U2.
В установившемся режиме напряжения U1 и U2 равны, а следовательно, напряжение на входе усилителя будет равно нулю. При изменении высоты полета с выхода усилителя на управляющую обмотку электродвигателя Д будет поступать напряжение. Двигатель через редуктор Ред будет перемещать щетку потенциометра П1 в направлении выравнивания напряжения U2 с напряжением U1. Одновременно двигатель через редуктор перемещает щетку выходного потенциометра П2, относительное сопротивление которого будет пропорционально напряжению, подаваемому на вход блока.
На схеме изображен только один выходной потенциометр П2. В действительности, в блоке БПНП имеется несколько таких потенциометров. По аналогичной схеме работают и другие блоки преобразования напряжений.
Рассмотрим погрешности системы воздушных сигналов. Все погрешности
СВС делятся на статические и динамические.
Статические погрешности обусловлены непостоянством температуры элементов системы, неточностью вычислительных устройств и трением в подвижных элементах.
Температурные погрешности датчиков устраняются термостатированием, а температурные погрешности решающих устройств уменьшаются до допустимых пределов путем выбора материала потенциометров.
В СВС преобладают погрешности, вызванные неточным моделированием вычислительных операций с помощью функциональных потенциометров. Существенное уменьшение этих погрешностей достигается регулировкой отдельных узлов и применением корректирующих устройств.
Погрешности, вызванные трением в подвижных элементах системы, не имеют существенного веса в связи с тем, что в СВС применяются следящие системы. По этой же причине не оказывают существенного влияния на точность СВС колебания напряжения и частоты тока источников питания.
Динамические погрешности СВС возникают вследствие запаздывания датчиков, вычислительных устройств и воздействия на элементы конструкции вибраций и перегрузок. Для уменьшения динамической погрешности, вызванной запаздыванием в передаче давления от приемников давления к датчикам, увеличивают диаметр и уменьшают длину трубопроводов и уменьшают объем датчиков. Влияние вибраций и перегрузок на динамическую погрешность уменьшают динамической балансировкой подвижных элементов, сокращением их массы и применением амортизации блоков.
Для повышения надежности работы СВС упругие чувствительные элементы анероидных и манометрических датчиков изготавливают из высококачественных материалов, усилители выполняют на полупроводниковых элементах, а следящие системы — на бесконтактных элементах. Стабильность характеристик достигается термостатированием блоков, применением амортизаторов и специальных влагогопоглотителей.
Система СВС-ПН-15-4 включается двумя выключателями «обогрев» и «питание», расположенными на верхнее электрощиткепри включенных АЗС питания постоянным и переменным на левой панели автоматов защиты(рис2.27).
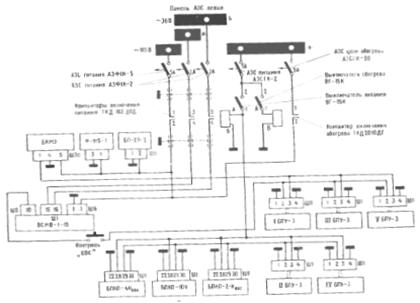
Рис.2.27 Схема электропитания СВС-ПН-15-4








