

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Оснащения врачебно-сестринской бригады.
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Пневматична шина є найбільш важливим елементом автомобільного колеса. При коченні жорсткого колеса по твердій дорозі його вісь копіює профіль дороги. Удари колеса по нерівності дороги повністю передаються колесом підвісці. Інший характер має кочення колеса по твердій дорозі на пневматичній шині. У нижній частині і особливо в місці контакту еластична шина деформується. При цьому невеликі нерівності збільшують деформацію шини і не впливають на положення осі колеса. Значні нерівності і сильні поштовхи викликають не тільки збільшену деформацію шини, але і плавне переміщення осі колеса. Така здатність пневматичної шини плавно змінювати характер впливу дороги на вісь колеса називається її згладжує, або нівелюючою здатністю.
2.Розрізняють наступні радіуси пневматичних коліс: вільний радіус колеса r, радіус повністю розвантаженого колеса.Статичний радіус колеса rст – відстань від дороги до вісі нерухомого колеса, навантаженого вертикальним вантажем. Величина rст для шини кожного типу при пропонованих навантаженню та внутрішнім тиском приводиться у технічній характеристиці шини.Динамічний радіус колеса rд збільшується із зменшенням вертикального навантаження на колесо та із збільшенням внутрішнього тиску у шині. При збільшенні швидкості кочення шина під дією відцентрових сил розтягується у радіальному напрямку і rд збільшується. У колеса, яке навантажене крутним моментом, елементи протектора, що знаходяться у контакті з дорогою, стиснуті і колесо за ту ж кількість обертів проходить менший шлях, чим при вільному коченні. У колеса навантаженого гальмівним моментом, елементи протектора, що знаходяться у контакті з дорогою, розтягнуті і колесо за ту ж кількість обертів проходить більший шлях, чим при вільному коченню. Таким чином, при дії крутного моменту rд зменшується, а при дії гальмівного моменту – збільшується. Враховуючи, що розміри обох радіусів у нормальних умовах руху автомобіля мало відрізняються один від одного їх приймають рівними.
3. Радіальна жорсткість
При експлуатації шина постійно перебуває під дією радіального навантаження, причому для кожного розміру шин існує максимально допустима величина цього навантаження. Під дією радіального навантаження шина деформується. Величина деформації (прогин) залежить від внутрішнього тиску, конструкції шини і матеріалів, з яких вона виготовлена, тобто від радіальної жорсткості шини.
Окружна жорсткість
При рушанні мотоцикла з місця, а також при гальмуванні, шини ведучого і гальмівних коліс схильні до дії крутного або гальмівного моменту.
При цьому в контакті виникають дотичні сили. Розподіл дотичних сил несиметрично щодо поперечної осі контакту. У передній частині контакту дотичні сили більше за величиною, ніж в задній частині.
Бічна жорсткість
Одна з важливих характеристик шини - її здатність деформуватися під дією бічної сили.
Бічна сила Рб, діє вздовж осі нерухомого колеса, навантаженого вертикальної силою Q, викликає зсув середньої площини колеса щодо центру площі контакту на деяку відстань а. При цьому площа контакту, залишаючись симетричною щодо осі колеса, трохи змінює свою форму. Дотичні сили, які у контакті, також симетричні стосовно осі колеса.
Кутова жорсткість
При додатку до нерухомого колесу, навантаженому вертикальної силою Q, моменту Мр чинного в площині, перпендикулярній осі кермової колонки мотоцикла, шина деформується. При цьому площина колеса повертається на деякий кут Y по відношенню до початкового положення.
Під дією моменту в контакті виникають дотичні сили. Ці сили в
задній частині контакту мають дещо більшу величину і спрямовані протилежно силам в передній частині контакту.
4. Опір коченню залежить від маси автомобіля і коефіцієнта тертя кочення. Маса автомобіля при цьому надає першорядний вплив на величину опору коченню. Велика маса проявляється несприятливо в будь-якому випадку, якщо ми прагнемо до економії енергії, то зменшення маси автомобіля є однією з першорядних завдань. Маса проявляється у вигляді сили, що притискує автомобіль до землі. Пересуванню перешкоджає сила, яка залежить від коефіцієнта тертя кочення між автомобілем і поверхнею дороги. Тут є можливість економити певну енергію. Сила опору коченню автомобіля Pf розраховується за формулою Pf = Q · f,
де Q - нормальне навантаження; f - коефіцієнт тертя кочення.
5. Експлуатаційні фактори, що впливають на коефіцієнт опору коченню колеса
Тип і стан дорожнього покриття - на деформируемой поверхні коефіцієнт опору коченню (f) показує величину деформації грунту, а також величину залишкової колії. На недеформованою поверхні (f) залежить від динамічних навантажень викликаних нерівністю покриття.
Швидкість руху - зі збільшенням даного показника від позначки 60 км / год, коефіцієнт опору коченню (f) збільшується. Особливо інтенсивно відбувається збільшенні при швидкості рівний більше 100 км / ч.
Навантаження на колесо - із збільшенням даного чинника, коефіцієнт (f) збільшується, особливо при навантаженні колеса більше 20% від номінального значення.
Знос протектора шини - чим вище знос протектора шини, тим менше коефіцієнт опору коченню. Так у зношеної шини, даний коефіцієнт на 20-25% менше, ніж у ной.
Температурний чинник - із збільшенням температури шини, коефіцієнт опору кочення зменшується. Так при зміні температури шини від -7 ° до +93 ° C, коефіцієнт опору кочення зменшується в три рази. Це пояснюється тим, що зі збільшенням температури шини, коефіцієнт тертя гуми зменшується, тобто зменшується внутрішні втрати шини.
6. Величина буксування характеризує втрату швидкості поступального руху трактора (автомобіля) від можливого його теоретичного значення. Фізична сутність процесу буксування міститься в наступному: зчеплення ходового апарату машини можливо уявити як виявлення сил тертя, діючих між опорною поверхнею рушія з ґрунтом, та сил зчеплення, виникаючих при упиранні рушіїв у ґрунт. На твердих ґрунтах основне значення мають сили тертя. На рихлих ґрунтах роль сил зчеплення значно збільшується і в багатьох випадках є вирішальною. Зачепи, заглиблюючись у ґрунт, пресують його у горизонтальному напрямку, внаслідок чого вісь рушія умовно переноситься на відповідну відстань назад. У цьому міститься основна причина зниженняпоступальної швидкості машини (формула 2.51). У залежності від різниці Vт – Vд буксування рушіїв δ коливається від 0 до 100%. При відсутності буксування (δ = 0) теоретичне значення швидкості руху машини дорівнює дійсному значенню швидкості: Vт = Vд і навпаки, при 100% буксуванні рушіїв, дійсна швидкість руху машини Vд = 0.При збільшенні δ зростає і сила опору кочення машини, рушії більше занурюються у ґрунт. У цьому випадку δ = f(Gзг). Зчеплення можливо розглядати як сили тертя та сили зчеплення. Буксування δ залежить від форми відбитку рушія на ґрунт та розміру дотичної сили тяги Рк. Передача ведучого крутного моменту Мк супроводжується буксуванням δ ведучих коліс. Буксування (δ=0) буває при відсутності горизонтальних та тангенціальних деформацій шин. При цьому Рк = 0, але це неможливо. Дос- лідами встановлено, що буксування рушіїв δ присутнє і при холостому русі (nхол). На буксування рушіїв значно впливає нормальна реакція грунту Ук, що рівнозначно зчіпній вазі Gзч. Отже відношення Рк/Gзч = φк – коефіцієнт використання зчіпної ваги Коефіцієнт використання зчіпної ваги φк не постійний і залежить від дотичної сили тяги. При Рк = 0 і φк = 0. Максимальне значення φк max визна- чається при повному використанні зчіпної ваги Рк = Рφ.
7 . Внаслідок взаємодії сили ваги і реактивної сили виникає сила тертя, яка виявляється у зчепленні між колесом і дорожнім покриттям. Сила зчеплення залежить від величини навантаження на ведучі колеса, стану дорожнього покриття і шин, внутрішнього тиску в шинах, форми малюнка протектора. Сила зчеплення визначається добутком коефіцієнта зчеплення і зчіпної маси. Коефіцієнт зчеплення коліс з дорогою вимірюють, як силу тертя між нерухомими колесами автомобіля і поверхнею проїзної частини на рівній горизонтальній ділянці. Для цього автомобіль із загальмованими колесами буксирують та за допомогою динамометра визначають силу тертя. Частка від ділення сили тертя (зчеплення) на зчіпну масу становитиме коефіцієнт зчеплення. Значення коефіцієнта зчеплення відрізняється залежно від виду і стану дорожнього покриття.
| Покриття дороги | Коефіцієнт зчеплення для доріг | |
| сухих | мокрих | |
| Асфальто-цементо-бетонне | 0,7-0,8 | 0,6-0.7 |
| Щебеневе | 0,6-0.7 | 0,3-0,4 |
| Ґрунтова дорога | 0,5-0,6 | 0,2-0,4 |
| Сніг | 0.2-0.3 | 0,2-0,3 |
| Ожеледиця | 0.1-0,2 | 0,1-0,2 |
Коефіцієнт зчеплення шин з дорогою різко знижується при зносі протектора шин, розбалансуванні коліс, їх блокуванні та збільшенні швидкості руху. Зчеплення коліс з дорогою залежить від режиму роботи двигуна. Керуючи автомобілем в умовах, коли коефіцієнт зчеплення невеликий, водій повинен знизити швидкість.
Вплив поперечного нахилу дороги і бокового вітру на автомобіль
Значна кількість пригод, зв'язаних з втратою автомобілем стійкості скоюється при русі на ділянках доріг з поперечним нахилом дорожнього полотна. При цьому трапляються випадки, коли автомобіль втративши] стійкість, виїжджає на смугу зустрічного руху, або навіть за межі дорожнього полотна. Особливо небезпечні нахили дороги при русі на високих швидкостях, тому, що вони призводять до поперечного І проковзування, зсуву автомобіля з дороги або його перекидання. Попередиш почате проковзування не легко навіть водіям високої кваліфікації, а в деяких випадках просто технічно не можливо. Поперечне проковзування або перекидання автомобіля може бути спричинено також не тільки нахилом! опорної поверхні дороги, а й дією зовнішніх сил прикладених до бокової! поверхні автомобіля, наприклад, сильний порив вітру або поштовх.
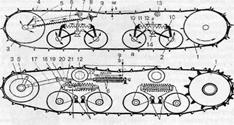
8) Гусеничні рушії бувають різних конструкцій Складаються з гусениці 4, ведучого колеса (зірочки) 1, напрямного колеса 3 з натяжним амортизаційним пристроєм, опорних котків 2 і підтримуючих роликів 13, встановлених на рамі трактора.
Схема роботи гусеничного рушія. При рухові трактора ведуча зірочка 1 (рис. 12.7) перемотує замкнутий гусеничний ланцюг. Його ланки безперервно укладаються перед опорними котками. Грунт, що знаходиться під опорною поверхнею гусениці, «опирається» зсуву ланками ланцюга. Цей опір у вигляді штовхаючого зусилля передається остову трактора, примушуючи його переміщуватись. Ланки, по яких уже пройшли опорні котки, безперервно піднімаються з поверхні грунту і спрямовуються до підтримуючих роликів.
Каретка складається із котків 2 і двох балансирів 10, з'єднаних шарніром 11. Зверху між балансирами затиснута розпірна пружина 12. Сила тяжіння С від остова трактора передається на котки каретки і через її балансири сприймається пружиною. При наїзді одного з котків на нерівність грунту тиск від котка через балансир також сприймається пружиною. Під дією таких поштовхів пружина постійно стискується і розтискується (як показано на рисунку).
Напрямне колесо встановлене на колінчастій осі 5, з'єднаній з механізмом натягування і амортизації. Гусеничний ланцюг натягують обертанням гайки 8, повертаючи колінчасту вісь вперед. Колесо 3, наштовхуючись на перешкоду, стискує пружину 6 і відходить назад. Удари по колесу амортизуються пружиною, пружність якої регулюють гайкою 7.
Підтримуючі ролики охороняють гусеничний ланцюг від значного провисання і поперечних коливань.
Гусениця— основна частина рушія. Вона являє собою замкнуту металеву стрічку, яка складається з окремих ланок, з'єднаних між собою за допомогою пальців 9
Питання 9)
Гусенична стрічка (гусениця) - замкнута суцільна стрічка або ланцюг з шарнірно-з'єднаних ланок (траків), застосовувана в гусеничного рушія. На внутрішній поверхні гусениці є западини або виступи, з якими взаємодіють ведучі колеса машини. Зовнішня поверхня гусениці забезпечена виступами (грунтозацепами), які забезпечують зчеплення з грунтом. Для збільшення зчеплення гусениці на грунтах з низькою несучою здатністю використовуються знімні шпори. Гусениці можуть бути металевими, резино-металевими і гумовими. Найбільшого поширення набули металеві гусениці з розбірними або нерозбірними ланками. Для підвищення зносостійкості і терміну служби гусениці їх ланки, а також з'єднувальні елементи (пальці, втулки) виготовляють зі спеціальної високомарганцовістой стали і піддають термічній обробці, а також використовують резино-металеві шарніри, шарніри з голчастим підшипником і ін
Питання 10)
Гусеничний рушій (рис.7.1) складається з двох замкнутих гусениць 1, направляючих 2 і ведучих коліс 4, опорних котків 3 і підтримуючих роликів 2, амортизуючих та натяжних пристроїв. Гусенична стрічка 1, замкнута по контуру, утворює гусеничний обвід.
Вітка обводу довжиною lp, що розташована між ведучим колесом та ґрунтом і навантажена дотичною силою тяги Т2, називається робочою або ведучою. Частина обводу між ведучим колесом та ґрунтом, не навантажена дотичною силою тяги, називається вільною віткою; ділянка довжиноюLr між крайніми опорними котками–опорною віткою.
Основним типом зачеплення гусениць з ведучими колесами є нормальне цівкове зачеплення, за якого крок tл ланок гусениці дорівнює кроку tк зубів ведучого колеса. Рухаючись без буксування і ковзання, гусеничний рушій за один оберт ведучих коліс, теоретичний радіус яких rк, проходить шлях
 ,
,
де Zka – число активно діючих зубів ведучого колеса (якщо кожен зуб послідовно входить в зачеплення з черговою ланкою гусеничного обводу, то число активно діючих зубів дорівнює загальному числу зубів ведучого колеса Zka=Zk, а якщо зачеплення діється через зуб то Zka=0,2·Zk).
На основі виразу (7.1)
 .
.
Якщо відома частота nк обертання ведучих коліс гусеничного рушія, середня теоретична швидкість руху трактора дорівнює
 .
.
У гусеничного трактора навіть у процесі рівномірного обертання ведучих коліс дійсна швидкість поступального руху періодично змінюється під час кожного переходу заднього опорного котка на наступну ланку гусениці. Інтенсивність періодичних коливань швидкості зростає з переходом на вищу передачу і за умови збільшення кроку ланок гусеничного обводу. Надалі під поступальною швидкістю руху гусеничного трактора будемо розуміти середню швидкість без врахування нерівномірності ходу.
Піддієювласноїсилитяжінняверхнявіткагусениціпровисає ,як ланцюг, і сила статичного натягу визначається з виразу:
 ,
,
де q – сила тяжіння одиниці довжини гусениці ;
a – довжина прольоту провисаючої вітки ;
h – стріла провисання.
Під час руху сила натягу То провисаючих віток гусениці дорівнює

де Vo – швидкість перемотування гусениці по обводу.
Перша складова виразу (7.5) враховує статичний натяг гусениці, а друга – інерційні сили.
Натяг Т1 – лобової вітки гусениці, що розташована між направляючим колесом і першим опорним котком, повинен бути таким, щоб колесо могло обертатися навколо осі О1. За умови рівномірного руху сила натягу визначається з рівняння суми моментів сил відносно осі О1.
T1rn – T0 rn–Mn= 0,
1 = Mn /rn– T0,
де rn – радіус направляючого колеса, момент опору обертанню якого Мп.
З рівняння суми моментів сил відносно осі О2 ведучого колеса визначається натяг Т2 робочої вітки гусениці
 ;
;
 ,
,
де Мвед – ведучий момент;
h дв – механічний ККД, що враховує втрати на дуговій вітці гусениці, яка контактує з ведучим колесом.
Під час усталеного руху Мвед/rk дорівнює коловій силі Р0на ведучому колесі і визначається за формулою
 ,
,
а дотична сила тяги Рк становить:
 ,
,
де Мr – приведений до осі ведучих коліс момент внутрішніх опорів гусеничного рушія .
Крім вказаних сил, на гусеничний рушій (рис.7.1) діють: Rп – результуюча нормальної Уп і повздовжньої Rfn реакцій ґрунту, що передаються лобовій вітці гусениці; У – рівнодійна нормальних реакцій ґрунту на опору вітки Lr.
Сила опору коченню Рf гусеничного трактора становить :
Коефіцієнт опору коченню f під час руху по горизонтальній ділянці
 ,
,
де fr і fп – коефіцієнти, що враховують внутрішні втрати в гусеничному рушії та зовнішні втрати на деформацію ґрунту;
G–сила тяжіння трактора.
Як зазначалось, до внутрішніх відносяться втрати на тертя в підшипниках опорних котків і підтримуючих роликів та направляючих коліс, перекочування опорних котків по бігових доріжках гусениць, тертя в шарнірах ланок гусениць і їх биття. Зовнішні втрати зумовлюються деформацією ґрунту під час кутових поворотів ланок опорної вітки і пресування ґрунту .
Коефіцієнт опору коченню f значно зростає на розпушених ґрунтах за рахунок збільшення коефіцієнтів fr і fп. Зростання викликане попаданням надмірної кількості абразивних частинок в шарніри гусениць, на їх бігові доріжки, та додатковою деформацією ґрунту.
ККД гусеничного рушія становить:
 ,
,
де  – ККД, що враховують відповідно втрати на перекочування трактора і буксування гусениць;
– ККД, що враховують відповідно втрати на перекочування трактора і буксування гусениць;
 – ККД, які характеризують відповідно втрати на подолання внутрішніх опорів у гусеничному рушії і на пресування ґрунту.
– ККД, які характеризують відповідно втрати на подолання внутрішніх опорів у гусеничному рушії і на пресування ґрунту.
На мінеральних ґрунтах нормальної вологості до 60...70 % всіх втрат в гусеничному рушії становлять внутрішні втрати, тому в умовах експлуатації особливо важливо підтримувати необхідний натяг гусениць і дотримуватись правил технічного обслуговування; втрати на деформацію (пресування) ґрунту досягають 20..30 %, а на буксування гусениць – 2...4 %.
Питання 11)
З конструктивних параметрів ходової системи, що найбільше впливають на тягові якості рушія, є довжина опорної поверхні гусениць, число опорних котків і крок гусеничного ланцюга. Збільшення значень цих параметрів сприяє підвищенню ККД ходової системи завдяки зниженню опору коченню і буксування. Цим пояснюються конструктивні особливості болотохідних тракторів і збільшений крок гусениць на промислових тракторах. Збільшення ширини гусениці сприяє підвищенню тягових якостей тільки на слабких, легкодеформованих ґрунтах (болота, сніжна цілина, піски). На ґрунтах і ґрунтах середньої і високої щільності збільшення ширини гусениці ефекту не дає, оскільки призводить до зростання маси ходової системи, а отже, і до підвищення втрат на тертя, погіршує заглиблення ґрунтозачепів і збільшує буксування. У результаті ККД знижується.
За незмінної довжини опорної поверхні збільшення числа опорних котків сприяє зростанню ККД ходової системи на легкодеформованих ґрунтах. На щільних ґрунтах кращі показники має ходова система з меншим числом опорних котків більшого діаметра, що пояснюється зменшенням опору коченню і кращим заглибленням ґрунтозачепів під опорними котками.
Питання 12)
Величина опору перекочування гусениць залежить від: 1) опору коченню опорних катків по гусениці (з втратами на тертя в підшипниках ковзанок), 2) опору деформації грунту гусеницями, 3) тертя в шарнірах частини цінуй, дотичної з грунтом, і 4) опору руйнування грунту шпорами ланок гусениці.
Опір коченню опорних ковзанок по гусениці представляє опір деформації внутрішньої поверхні гусениці і зовнішньої поверхні ка псів. Чим твердіше ці поверхні, тим менше їх реформація і опір коченню ковзанок. Ковзанки з гумовими образами зменшують шум, але дають великі втрати на кочення, ніж катки з металевими ободами.
Тертя в підшипниках ковзанок залежить від загальних властивостей їх (конструкції, якості виготовлення і монтажу, мастила, навантаження та ін.)
Деформація (пресування) грунту гусеницями залежить від твердості грунту і розмірів ланок ланцюга і ковзанки. Із збільшенням м'якості грунту, а також зменшенням розмірів ланок ланцюга і діаметра ковзанок, зростає занурення ділянок ланцюга під катками в грунт і відповідно збільшується опір руху.
Головне вплив на величину пресування грунту чинить група передніх ковзанок, які першими насуваються на грунт; середні і задні катки працюють на спресованої поверхні. Отже, передні катки та їх підшипники мають велику величину зносу. У процесі пресування грунту з'являється відносне поворачивание ланок при зануренні їх у грунт; це поворачивание супроводжується тертям в шарнірах, залежних, головним чином, від стану дотичних поверхонь (чим більше бруду, тим більше втрати і знос).
Для поліпшення зчеплення гусениці з грунтом ланки ланцюга забезпечуються зовнішніми виступами (шпорами), заглиблюється в грунт і забезпечують зачеплення ланцюга з грунтом.
Рух ланки ланцюга викликає не тільки занурення шпори в грунт, але також часткове руйнування грунту (зрушення і зріз). Це порушення залежить від твердості грунту, розміру шпори і ланки. Чим довше шпора і ланка, тим значніше руйнування.
Головним елементом з числа складових опір перекочування є опір деформації грунту; інші складові - другорядні і незначні.
Опір перекочування гусеничного трактора оцінюється в цілому для всієї машини коефіцієнтом опору перекочування, які представляють ставлення сили опору перекочування до повного вазі трактора. Загальні розрахункові формули сили і потужності опору однакові як для колісного, так і для гусеничного трактора.
Питання 13)
Складові опору кочення- ведений та ведучий режим
Дотична реакція дороги (грунту) на ведене колесо при рівномірному русі його кочення і відсутності припускається) інших опорів, рівна штовхаючій силі, направлена протилежно руху колеса і є силою опору. Відношення а/r є коефіцієнтом опору кочення fоефіцієнт опору кочення рівний відношенню штовхаючої сили до нормальної реакції грунту. При коченні колеса без ковзання величина коефіцієнта fзумовлена зміщенням на величину а нормальної реакції У від вертикального діаметра колеса. Добуток У·f є силою опору кочення у горизонтальній площині. Коефіцієнт зчеплення φ визначається відношенням сили, яка визиває рівномірне ковзання колеса, до нормальноїреакції дороги. У залежності від напрямку ковзання колеса коефіцієнт зчеплення можебутповздовжніφх та поперечним φу. Коефіцієнт зчеплення та сила зчеплення залежать від поверхні грунту та будови рушіїв.
Питання 15)
Гусеничні транспортні засоби під час руху по слабонесучих грунтах (наприклад пухкому снігу) провалюються в ґрунт на глибину, що перевищує дорожній просвіт. Як наслідок, з’являється “бульдозерний ефект” не тільки для
гусениць, а й для частини днища кузова, створюючи при цьому додатковий опір пересуванню. Значне перевищення опору призводить до буксування рушія і повної зупинки транспортного засобу. Отже, прохідність гусеничних транспортних засобів по глибокому снігу визначається перш за все дорожнім просвітом і глибиною колії. Чим менша глибина колії, трангспортних засобів і більший дорожній просвіт гусеничної машини, тим вища її прохідність.
Глибина колії зменшується у разі: ♦ зниження найбільших і середніх значень тиску, що діє в плямі контакту, ♦ збільшення несучої здатності опорної площі плями контакту; ♦ скорочення періоду часу взаємодії ходових частин з ґрунтом і зменшення товщини шару, що стискається [7].
Зменшення товщини стиснутого шару ґрунту і збільшення несучої здатності опорної площі плями контакту пов’язані зі зміною властивостей самого ґрунту. Скорочення часу взаємодії гусениці з ґрунтом відбувається з підвищенням швидкості трактора, а це вимагає збільшення питомої потужності силових агрегатів, до збільшення маси і ускладнення конструкції гусеничної машини. Тому найлегше здійсненним і поширеним способом зменшення глибини колії є зниження максимальних і середніх значень тиску, що діє в плямі контакту. Це досягається збільшенням площі опорної поверхні, тобто за рахунок збільшення геометричних параметрів рушія, шляхом застосування розширених ланок і подовжених гусениць, безшарнірних гумово-металевих гусениць, пневмогусениць різної конструкції. Проте у цього способу є істотний недолік: зі збільшенням площі опори зменшується зчеплення елементів рушія (траками гусениці) з ґрунтом і, як наслідок, з’являється тенденція до пробуксовування. Сила тяги гусеничної машини є “рівнодіючою реакцій ґрунту на зрушення траками гусениці” [7]. Збільшення розмірів площі опори спричиняє розподіл маси гусеничної машини по більшій поверхні ґрунту, що мають менший опір зрушенню. Допустиме горизонтальне навантаження зростає із збільшенням щільності [8], а в разі збільшення щільності снігу в середньому в 4,3 раза допустиме горизонтальне навантаження на сніг зростає у 24 рази. Тому ущільнення снігу під опорною поверхнею рушія позитивно впливає на збільшення зчеплення
Визначення опору кочення
Гусеничного рушія
Сила опору коченню Рf гусеничного трактора становить :
 .
.
де Мr – приведений до осі ведучих коліс момент внутрішніх опорів гусеничного рушія .
rK -теоретичний радіус.
Rfn -повздовжньої реакцій ґрунту
Коефіцієнт опору коченню f під час руху по горизонтальній ділянці
 ,
,
де fr і fп – коефіцієнти, що враховують внутрішні втрати в гусеничному рушії та зовнішні втрати на деформацію ґрунту;
G–сила тяжіння трактора.
Складові опору кочення
Експериментальне визначення
Опору кочення
19 Буксування гусеничного рушія, 20 Фактори, що впливають на
Коефіцієнт буксування
Буксування гусеничного рушія визначають як відношення швидкості буксування Vd до теоретичної швидкості руху:
 ,
,
де: Vд– дійсна швидкість руху.
Під час експериментальних досліджень d розраховується за формулою:
 ,
,
де nкх – число обертів ведучих коліс гусеничного рушія під час проходження без тягового навантаження гону, довжина якого SГ;
nkp – число обертів ведучих коліс за час проходження з тяговим навантаженням на заданому агрофоні гону довжиною SГ.Величина буксування характеризує втрату швидкості поступального руху трактора (автомобіля) від можливого його теоретичного значення.Фізична сутність процесу буксування міститься в наступному: зчеплення ходового апарату машини можливо уявити як виявлення сил тертя, діючих між опорною поверхнею рушія з ґрунтом, та сил зчеплення, виникаючих при упиранні рушіїв у ґрунт. На твердих ґрунтах основне значення мають сили тертя. На рихлих ґрунтах роль сил зчеплення значно збільшується і в багатьох випадках є вирішальною. Зачепи, заглиблюючись у ґрунт, пресують його у горизонтальному напрямку, внаслідок чого вісь рушія умовно переноситься на відповідну відстань назад. У цьому міститься основна причина зниження поступальної швидкості машини (формула 2.51).
У залежності від різниці Vт – Vд буксування рушіїв δ коливається від 0 до 100%. При відсутності буксування (δ = 0) теоретичне значення швидкості руху машини дорівнює дійсному значенню швидкості: Vт = Vд і навпаки, при 100% буксуванні рушіїв, дійсна швидкість руху машини Vд = 0.При збільшенні δ зростає і сила опору кочення машини, рушії більше занурюються у ґрунт. У цьому випадку δ = f(Gзг). Зчеплення можливо розглядати як сили тертя та сили зчеплення. Буксування δ залежить від форми відбитку рушія на ґрунт та розміру дотичної сили тяги Рк. Передача ведучого крутного моменту Мк супроводжується буксуванням δ ведучих коліс. Буксування (δ=0) буває при відсутності горизонтальних та тангенціальних деформацій шин. При цьому Рк = 0, але це неможливо. Дос- лідами встановлено, що буксування рушіїв δ присутнє і при холостому русі (nхол).На буксування рушіїв значно впливає нормальна реакція грунту Ук, що рівнозначно зчіпній вазі Gзч. Отже відношення Рк/Gзч = φк – коефіцієнт використання зчіпної ваги. Коефіцієнт буксування може служити сигналом для оптимізації параметрів режиму роботи машини. Для отримання обраної величини буксування на деякій конечнрм відрізку шляху проводиться порівняння числа імпульсів, відповідних кутах повороту ведучого і веденого коліс. [1]
Коефіцієнт буксування зазвичай обмежують максимальними значеннями 4 - 6% для гусеничних і 15 - 18% для колісних тракторів. Коефіцієнт опору перекзтиванію / береться постійним нз всім дізпззоне робочих швидкостей. [2] Швидкості руху бульдозера, і особливо при робочому ході, повинні визначатися з урахуванням коефіцієнта буксування
|
|
|

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
© cyberpedia.su 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

