Возьмем три взаимно перпендикулярные координатные оси х,у,z, которым соответствуют орты  Момент
Момент  силы
силы  относительно начала координат, выражается формулой
относительно начала координат, выражается формулой
 ,
,
где  - радиус-вектор точки А приложения силы относительно начала координат (рис. 3.7).
- радиус-вектор точки А приложения силы относительно начала координат (рис. 3.7).

Рис. 3.7
Разложим вектор на составляющие по осям координат:
 ,
,
где  - проекции
- проекции  на оси координат.
на оси координат.
Из векторной алгебры известно, что векторное произведение  можно представить определителем
можно представить определителем
 ,
,
где х, у, z - проекции вектора , а X,Y,Z - проекции вектора на оси координат.
Приравнивая значения  и определителя, разложенного по элементам первой строки, получаем
и определителя, разложенного по элементам первой строки, получаем
 .
.
Сопоставляя левые и правые части этого равенства, находим проекции момента на оси координат, равные моментам силы относительно этих осей:
 . (3.3)
. (3.3)
Формулы (3.3) называются аналитическими выражениями моментов силы относительно координатных осей.
Момент , равный геометрической сумме моментов всех сил системы относительно точки О, называется главным моментом системы сил относительно этой точки (рис. 3.8):
 . (3.4)
. (3.4)


Рис. 3.8 Рис. 3.9
Момент, равный алгебраической сумме моментов всех сил системы относительно оси z, называется главным моментом системы сил относительно оси z (рис. 3.9):
 . (3.5)
. (3.5)
Главный момент системы сил относительно оси изображается отрезком, отложенным по оси z от любой ее точки О в положительном направлении, если  , и в отрицательном, если
, и в отрицательном, если  .
.
Пара сил И ЕЕ СВОЙСТВА
Система двух равных по модулю, параллельных и противоположно направленных сил и  называется парой сил. Плоскость, в которой находятся линии действия сил и , называется плоскостью действия пары сил (рис. 3.10).
называется парой сил. Плоскость, в которой находятся линии действия сил и , называется плоскостью действия пары сил (рис. 3.10).
Пара сил не имеет равнодействующей, силы пары не уравновешиваются, так как они не направлены по одной прямой. Пара сил стремится произвести вращение твердого тела, к которому она приложена.
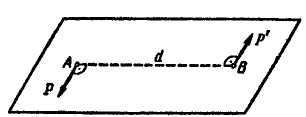

Рис. 3.10 Рис. 3.11

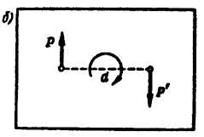
Рис. 3.12
Кратчайшее расстояние d между линиями действия сил, составляющих пару, называется плечом пары сил.
Действие пары сил на твердое тело характеризуется ее моментом. Момент пары сил определяется произведением модуля одной из сил пары на ее плечо:
 . (3.6)
. (3.6)
Если силы выражать в ньютонах, а плечо - в метрах, то момент пары сил будет выражаться в ньютон∙метрах (Н×м).
Момент пары сил изображают вектором.
Вектор момента  пары , направляют перпендикулярно плоскости действия пары сил в такую сторону, чтобы, смотря навстречу этому вектору, видеть пару сил стремящейся вращать плоскость ее действия в сторону, обратную вращению часовой стрелки (рис. 3.11).
пары , направляют перпендикулярно плоскости действия пары сил в такую сторону, чтобы, смотря навстречу этому вектору, видеть пару сил стремящейся вращать плоскость ее действия в сторону, обратную вращению часовой стрелки (рис. 3.11).
Если рассматриваются только пары сил, лежащие в одной плоскости, то эту плоскость совмещают с плоскостью чертежа (рис. 3.12).
Вместо вектора момента каждой пары сил, перпендикулярного плоскости чертежа, указывают только направление, в котором пара сил стремится вращать эту плоскость.
В этом случае момент пары сил определяют произведением модуля сил на плечо пары сил, взятым со знаком плюс или минус, т. е. момент пары сил рассматривают как алгебраическую величину
 . (3.7)
. (3.7)
Момент пары сил считают положительным, если пара сил стремится вращать плоскость чертежа в сторону, противоположную вращению часовой стрелки ( рис.3.12, а), и отрицательным - в сторону вращения часовой стрелки (рис. 3.11, 3.12).
Свойства пар сил:
1. Две пары сил называют эквивалентными, если они обладают геометрически равными моментами, т. е. эти пары имеют одинаковые по модулю моменты, и эти моменты одинаково направлены.
2. Пару сил, не изменяя ее действия на твердое тело, можно переносить в любое место в плоскости ее действия, поворачивать ее плечо на любой угол, а также изменять ее плечо и модули сил, не изменяя числового значения величины ее момента и направления вращения.
3. Не изменяя действия пары сил на твердое тело, пару сил можно переносить в любую плоскость, параллельную плоскости действия пары, а также изменять ее силы и плечо, сохраняя неизменным модуль и направление ее момента.
Таким образом, вектор момента пары сил можно переносить в любую точку, т. е. момент пары сил является свободным вектором.
Вектор момента пары сил определяет все три ее элемента: положение плоскости действия пары, направление вращения и числовое значение момента.








