

Рис. 12.12
Центр колеса движется равномерно по прямой; следовательно, его ускорение  т.е. центр колеса является мгновенным центром ускорений.
т.е. центр колеса является мгновенным центром ускорений.
Так как колесо вращается равномерно, то ускорения всех точек колеса равны центростремительным ускорениям этих точек в их вращательном движении вокруг мгновенного центра ускорения. Например, ускорения точек обода определяются так:

Ускорение каждой точки колеса направлено к мгновенному центру ускорений. В рассмотренном примере наглядно видно, что мгновенный центр скоростей Р и мгновенный центр ускорений Q являются различными точками плоской фигуры. Мгновенный центр скоростей, не имея в данный момент скорости, имеет ускорение  , а мгновенный центр ускорений, не имея в данный момент ускорения, имеет скорость
, а мгновенный центр ускорений, не имея в данный момент ускорения, имеет скорость  .
.
С л у ч а й II. Известны модуль и направление ускорения какой-либо точки А плоской фигуры  , а также угловая скорость
, а также угловая скорость  и угловое ускорение
и угловое ускорение  фигуры.
фигуры.
Определим положение мгновенного центра ускорений в частных случаях, зависящих от значений и .
1. Неравномерное вращение:  . В этом случае мгновенный центр ускорений находится на отрезке, составляющем с направлением ускорения
. В этом случае мгновенный центр ускорений находится на отрезке, составляющем с направлением ускорения  угол
угол  , который отложен от ускорения точки в сторону
, который отложен от ускорения точки в сторону  на расстоянии от точки А, равном
на расстоянии от точки А, равном
 .
.
На рис. 12.13 показан случай ускоренного вращения плоской фигуры, а на рис. 12.14 — случай замедленного вращения.



Рис. 12.13 Рис. 12.14 Рис. 12.15
Ускорение любой другой точки плоской фигуры можно определить по формуле (12.4). Как видно, направление вращения на построение угла  не влияет и угол всегда откладывается от направления ускорения в сторону
не влияет и угол всегда откладывается от направления ускорения в сторону  .
.
2. Равномерное вращение:  (также момент, когда
(также момент, когда  при неравномерном вращении) (рис. 12.15). В этом случае
при неравномерном вращении) (рис. 12.15). В этом случае
 и
и 
т. е. ускорения всех точек направлены к мгновенному центру ускорений. Расстояние от точки до мгновенного центра ускорений определяется по формуле:
 (12.6)
(12.6)
3. Момент, когда угловая скорость становится равна нулю:  . В этом случае
. В этом случае

т.е. ускорения всех точек направлены перпендикулярно отрезкам, соединяющим эти точки с мгновенным центром ускорений (рис. 12.16). Расстояние от точки до мгновенного центра ускорений определяется по формуле
 (12.7)
(12.7)


Рис. 12.16 Рис. 12.17
Угловая скорость фигуры обычно обращается в нуль при изменении направления вращения фигуры.
4. Момент, когда угловая скорость и угловое ускорение становятся равными нулю при непоступательном движении:  . В этом случае ускорения всех точек плоской фигуры в данный момент геометрически равны, так как ускорение любой точки равно ускорению полюса (рис. 12.17) по формулам:
. В этом случае ускорения всех точек плоской фигуры в данный момент геометрически равны, так как ускорение любой точки равно ускорению полюса (рис. 12.17) по формулам:
 .
.
С л у ч а й III. Известны модули и направления ускорений двух точек плоской фигуры. Допустим, что известны ускорения точек А и В плоской фигуры и  (рис. 12.18).
(рис. 12.18).
Примем точку А за полюс, тогда

Построим при точке В параллелограмм ускорений по заданной диагонали  и одной из сторон
и одной из сторон  . Другая сторона параллелограмма определит ускорение
. Другая сторона параллелограмма определит ускорение  во вращении точки В фигуры вокруг полюса А. Ускорение составляет угол
во вращении точки В фигуры вокруг полюса А. Ускорение составляет угол  с отрезком АВ, соединяющим точку В с полюсом А.
с отрезком АВ, соединяющим точку В с полюсом А.

Рис. 12.18
Отсчитывая полученный угол α от ускорения к отрезку АВ, получаем направление , в данном случае противоположное направлению вращения часовой стрелки. Определив угол α и направление , отложим этот угол от ускорений точек А и В по направлению . Две полученные полупрямые продолжим до пересечения в точке Q, которая и будет мгновенным центром ускорений.
Этот способ определения положения мгновенного центра ускорений не требует определения угла α путем вычислений. Если положение мгновенного центра ускорений по этому способу определяется графически, то ускорения точек должны быть отложены в масштабе по их истинным направлениям.
Рассмотрим случаи, когда ускорения точек плоской фигуры параллельны. Положение мгновенного центра ускорений в этом случае определяется на основании того, что:
1) модули ускорений точек пропорциональны длинам отрезков, соединяющих точки с мгновенным центром ускорений:
 .
.
2) ускорения точек составляют с отрезками, соединяющими точки с мгновенным центром ускорений, один и тот же угол .
На рис. 12.19 и 12.20 выполнено построение для случая  , т. е.
, т. е.  .
.


Рис. 12.19 Рис. 12.20
Рис. 12.21 и 12.22 соответствуют случаю α=90о:
 .
.


Рис. 12.21 Рис. 12.22
На рис. 12.23 и рис. 12.24 построен мгновенный центр ускорений для случая


Рис. 12.23 Рис. 12.24
 .
.
В случае  (рис. 12.23) мгновенный центр ускорений находится в бесконечности, а ускорения всех точек плоской фигуры геометрически равны.
(рис. 12.23) мгновенный центр ускорений находится в бесконечности, а ускорения всех точек плоской фигуры геометрически равны.
Действительно, имеем

а потому найдем

При АВ ≠0

Пример 1. Колесо радиуса r = 1 м катится без скольжения ускоренно по прямолинейному рельсу, имея в данный момент времени скорость центра v o = 1 м/с и ускорение центра a о — 1 м / с 2 (рис. 4.1.1). Определить угловую скорость и угловое ускорение колеса, скорости и ускорения точек его обода М 1, М 2, М 3 и М 4, а также установить положение МЦС и МЦУ колеса.


Рис. 4.1.1 Рис. 4.1.2
Решение.
I. Определение скоростей. У колеса, катящегося без скольжения по неподвижной поверхности, МЦС (точка Р) находится в точке касания с этой поверхностью (рис. 4.1.2). В данном случае это точка M 1 (М 1 = Р):  .
.
Скорости точек плоской фигуры пропорциональны расстояниям от этих точек до МЦС:  , где ω — угловая скорость тела. Применяем эту формулу к точке О: v o = ω | ОР | = ωr, откуда ω = v o/ r = 1 с–1.
, где ω — угловая скорость тела. Применяем эту формулу к точке О: v o = ω | ОР | = ωr, откуда ω = v o/ r = 1 с–1.
Для точек М 2 и М 3 расстояния до точки Р одинаковы, поэтому одинаковы и модули скоростей этих точек:
 м/с.
м/с.
Скорость точки М 3  м/с. Направления скоростей перпендикулярны отрезкам, соединяющим точки с МЦС.
м/с. Направления скоростей перпендикулярны отрезкам, соединяющим точки с МЦС.
Для вычисления скоростей можно было использовать также и теорему о сложении скоростей, выбрав в качестве полюса центр колеса:  , где vMO = ω | МО |. Скорость
, где vMO = ω | МО |. Скорость  перпендикулярна отрезку МО и направлена по ходу вращения.
перпендикулярна отрезку МО и направлена по ходу вращения.
Можно было также пользоваться и следствием из этой теоремы о равенстве проекций скоростей точек на ось, проходящую через эти точки.
2. Определение ускорений. Вычислим сначала угловое ускорение колеса, формально дифференцируя выражение угловой скорости
 .
.
В данном случае использован тот факт, что движение центра колеса прямолинейное и, следовательно, касательное ускорение точки  совпадает с полным ускорением.
совпадает с полным ускорением.
Для вычисления ускорений точек колеса применим теорему о сложении ускорений:  , выбрав в качестве полюса центр колеса. Вращательное ускорение точки относительно полюса
, выбрав в качестве полюса центр колеса. Вращательное ускорение точки относительно полюса  и направлено перпендикулярно отрезку МО по ходу углового ускорения а центростремительное
и направлено перпендикулярно отрезку МО по ходу углового ускорения а центростремительное  всегда направлено от точки к полюсу.
всегда направлено от точки к полюсу.
Тогда для точек М 1, М 2, М 3 и М 4 получим  ,
,  . Направления их показаны на рис. 4.1.3.
. Направления их показаны на рис. 4.1.3.


Рис. 4.1.3 Рис. 4.1.4
Складывая в каждой точке три вектора, модули которых равны по 1 м / с 2, получаем  м / с 2,
м / с 2,  м / с 2.
м / с 2.
3. Определение положения МЦУ. Найти положение МЦУ (точки Q, ускорение которой равно нулю) можно на основании известных положений:
а) все ускорения составляют один и тот же угол β с направлениями из этих точек на МЦУ:
 .
.
В данном случае tg β = 1 и β = 45°. Повернув каждое ускорение на угол β по ходу углового ускорения, мы на пересечении лучей и получим точку Q (рис. 4.1.4). Итак, МЦУ колеса при принятых исходных данных оказывается на середине отрезка М 1 M 4;
б) ускорения точек пропорциональны расстояниям от этих точек до МЦУ:
 .
.
В силу одинаковости расстояний до МЦУ в данном случае оказываются равны между собой модули ускорений  , а также
, а также  . Из всех точек колеса самое большое ускорение будет иметь точка D (рис. 4.1.4):
. Из всех точек колеса самое большое ускорение будет иметь точка D (рис. 4.1.4):
 .
.
Ответ:
ω = 1 с –1; ε = 1 с –2;  = 0;
= 0;  м/с;
м/с;  = 2 м/с;
= 2 м/с;  ;
;  .
.
Пример 2. Кривошип OA длиной 0,2 м вращается равномерно с угловой скоростью ωOA = 10 с–1 и приводит в движение шатун АВ длиной 1 м. Ползун В движется по вертикали. Найти угловую скорость и угловое ускорение шатуна, а также скорость и ускорение ползуна в момент, когда кривошип и шатун взаимно перпендикулярны и образуют с вертикалью угол 45° (рис. 4.1.5).
Решение.
1. Определение скоростей. Вычислим скорость точки А как точки вращающегося кривошипа:
 .
.
Она направлена перпендикулярно ОА (рис. 4.1.6).

Рис. 4.1.5
Скорость vB ползуна направлена по направляющей вертикально.
Для шатуна АВ, совершающего плоское движение, теперь известны направления скоростей двух его точек: А и В. Восставляя перпендикуляры к векторам этих скоростей, находим точку Р их пересечения — МЦС шатуна.
Используя известную формулу для скоростей точек при плоском движении, получаем  ;
;  .
.


Рис. 4.1.6 Рис. 4.1.7
Из треугольника АВР имеем | АР | = 1 м; | ВР | =  м, и тогда
м, и тогда
 .
.
2. Определение ускорений. Вычислим сначала ускорение точки А как точки кривошипа:  .
.
Здесь вращательное ускорение  , так как
, так как  , поскольку
, поскольку  .
.
Тогда полное ускорение точки А равно центростремительному

и направлено к оси вращения — точке О (рис. 4.1.5).
Для вычисления ускорения точки В воспользуемся теоремой о сложении ускорений, взяв точку А в качестве полюса:
 . (*)
. (*)
Центростремительное ускорение точки В в относительном вращении вокруг точки А по модулю равно  , и направлено от точки В к полюсу — точке А.
, и направлено от точки В к полюсу — точке А.
Модуль вращательного ускорения  определяется по формуле
определяется по формуле  и пока не может быть вычислен, поскольку неизвестна величина углового ускорения
и пока не может быть вычислен, поскольку неизвестна величина углового ускорения  . Направление вектора
. Направление вектора  также не может быть определено однозначно, так как неизвестно направление углового ускорения, т. е. неизвестно, ускоренным или замедленным является поворот шатуна. Примем пока этот поворот ускоренным, тогда направление
также не может быть определено однозначно, так как неизвестно направление углового ускорения, т. е. неизвестно, ускоренным или замедленным является поворот шатуна. Примем пока этот поворот ускоренным, тогда направление  совпадет с направлением
совпадет с направлением  , а вектор направим перпендикулярно отрезку ВА по ходу углового ускорения.
, а вектор направим перпендикулярно отрезку ВА по ходу углового ускорения.
Вектор ускорения точки В направлен по вертикальной прямолинейной направляющей. Будем пока считать движение ползуна ускоренным и направим ускорение  в ту же сторону, что и скорость
в ту же сторону, что и скорость  (рис. 4.1.6, 4.1.7).
(рис. 4.1.6, 4.1.7).
Теперь в равенстве (*) все ускорения имеют определенное направление, и мы можем записать это уравнение в проекциях на выбранные оси:
 .
.
Из последнего уравнения получаем  , тогда из первого уравнения
, тогда из первого уравнения
 .
.
Отсюда следует, что
 .
.
Отрицательные знаки у величин и показывают, что их истинные направления противоположны принятым.
Ответ:  = 2 с –1; = –16 с –2; vB = 2 м/с; аВ = = 4 м / с 2.
= 2 с –1; = –16 с –2; vB = 2 м/с; аВ = = 4 м / с 2.
Пример 3. Круглый цилиндр А обмотан тонким тросом, конец которого В закреплен неподвижно. Цилиндр падает без начальной скорости, разматывая трос. Значение скорости оси цилиндра определяется формулой  , где g – ускорение силы тяжести; у – расстояние, пройденное центром цилиндра, отсчитываемое от начального положения, т.е. координата точки А. Точка А движется прямолинейно по вертикали. Радиус цилиндра равен r. Определить скорости четырех точек на ободе цилиндра, расположенных на концах взаимно перпендикулярных диаметров, изображенных на рис. 4.1.8.
, где g – ускорение силы тяжести; у – расстояние, пройденное центром цилиндра, отсчитываемое от начального положения, т.е. координата точки А. Точка А движется прямолинейно по вертикали. Радиус цилиндра равен r. Определить скорости четырех точек на ободе цилиндра, расположенных на концах взаимно перпендикулярных диаметров, изображенных на рис. 4.1.8.
Решение. Мгновенный центр скоростей цилиндра находится в точке D, где неподвижная часть троса BD соприкасается с цилиндром. В этом месте скорости точек троса и цилиндра, находящихся в соприкосновении, равны между собой и, следовательно, равны нулю. Скорости остальных точек пропорциональны расстояниям до мгновенного центра скоростей и перпендикулярны к мгновенным радиусам. Величина скорости точки Е определяется из пропорции
 ,
,
откуда, учитывая формулу (1), находим, что
 . (2)
. (2)

Рис. 4.1.8
Направление скорости точки Е перпендикулярно к мгновенному радиусу DE, т. е. параллельно скорости точки А. Скорости точек С и Н равны по величине, так как они отстоят от мгновенного центра скоростей, точки D, на одинаковых расстояниях DC=DH=r  . Величины этих скоростей определяются из пропорции
. Величины этих скоростей определяются из пропорции
 ,
,
откуда
 , (3)
, (3)
направлены эти скорости перпендикулярно к мгновенным радиусам CD и HD(рис. 4.1.8, б).
Формулы (2) и (3) определяют величину скоростей точек С,Е,Н как функцию пройденного центром цилиндра расстояния у. Найдем величину этих скоростей как функцию времени.
Так как точка А движется прямолинейно по вертикали, то
 .
.
Отделяя переменные, имеем

Интегрируя это дифференциальное уравнение и полагая у =0 при t= 0, находим уравнение движения центра цилиндра
 .
.
Подставляя это значение расстояния у в формулы (2) и (3), получаем

Величину скорости точек С и Н можно также найти на основании теоремы о равенстве проекций скоростей двух точек плоской фигуры на прямую, соединяющую эти точки. Скорости точек С и Н составляют углы 45о с линией САН, а скорости точки А направлена по этой прямой. Следовательно,

откуда

Пример 4. Прямоугольник ABCD совершает плоское движение. Ускорение точки А в данный момент равно  =2 см/с 2 и составляет угол 30о с прямой АВ. Ускорение точки В равно
=2 см/с 2 и составляет угол 30о с прямой АВ. Ускорение точки В равно  =6 см/с 2 и образует угол 60о с прямой ВА. Длина сторон: АВ =10 см, ВС= 5 см. Определить мгновенную угловую скорость и мгновенное угловое ускорение прямоугольника, а также ускорение точки С.
=6 см/с 2 и образует угол 60о с прямой ВА. Длина сторон: АВ =10 см, ВС= 5 см. Определить мгновенную угловую скорость и мгновенное угловое ускорение прямоугольника, а также ускорение точки С.
Решение. Выбираем точку А за полюс. Тогда ускорение точки В
 . (1)
. (1)
Проектируем векторное равенство (1) на оси х и у. В проекции на ось х имеем

откуда


Рис. 4.1.9
Теперь найдем величину мгновенной угловой скорости фигуры

Проецируя векторное равенство (1) на ось у, получаем
 .
.
Отсюда определяется вращательное ускорение точки В:

Далее находим величину мгновенного углового ускорения фигуры
 .
.
Угловое ускорение фигуры направлено по оси z в отрицательную сторону.
Переходим к определению ускорения точки С. Согласно формуле распределения ускорений, выбирая точку В за полюс, имеем (рис. 4.1.9, б):
 .
.
Проецируя это равенство на оси х и у, находим

Теперь легко найдется величина ускорения точки С:
 .
.
Направление аС определится формулами

Пример 1. Кривошип ОА нецентрального кривошипно-шатунного механизма (рис. 8.2) вращается с угловой скоростью ω 1. Определить скорости точек В и М, а также угловую скорость шатуна АВ для заданного положения звеньев механизма, если известно: φ =30°; ω 1 = 2 рад / с; ОА = 0,4 м; АВ = 0,8 м; АМ= 0,4 м; h = 0,2 м.
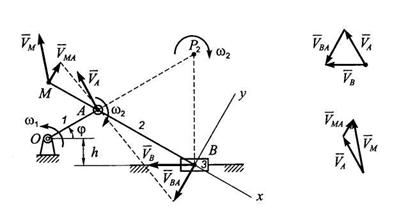
Рис. 8.2
Решение. Далее будут рассмотрены три способа решения задачи.
Первый способ - разложение движения звена на переносное поступательное и относительное вращательное.
Разложим движение второго звена на переносное поступательное и относительное вращательное. За полюс принимаем точку А и запишем теорему сложения скоростей для точки В.
 .
.
.
Строим кинематическую схему механизма в выбранном масштабе (1:20), указываем на схеме направление скоростей точек A и В.
Скорость точки В направлена горизонтально, так как точка В принадлежит и шатуну и ползуну, а движение ползуна поступательное прямолинейное по горизонтали. Таким образом, траектория точки В - горизонтальная прямая, вдоль которой и направлена скорость точки В. Точка А шатуна совпадает с точкой А кривошипа ОА и движется по окружности радиуса ОА, так как движение кривошипа вращательное вокруг центра О.
Зная угловую скорость  кривошипа, найдем величину скорости точки А
кривошипа, найдем величину скорости точки А
 м/с.
м/с.
Скорость  направлена перпендикулярно прямой АВ, а прямая АВ образует с направлением скорости точки В угол 30° (так подобраны размеры звеньев), следовательно, скорость образует с горизонталью угол 60°, а скорость точки А перпендикулярна ОА (касательная перпендикулярна к радиусу) и образует с горизонталью также угол 60°.
направлена перпендикулярно прямой АВ, а прямая АВ образует с направлением скорости точки В угол 30° (так подобраны размеры звеньев), следовательно, скорость образует с горизонталью угол 60°, а скорость точки А перпендикулярна ОА (касательная перпендикулярна к радиусу) и образует с горизонталью также угол 60°.
Для определения скорости и скорости точки В построим в масштабе (1:40) треугольник скоростей (рис. 8.2 вверху справа).
На основании вышеизложенного этот треугольник равносторонний, следовательно,
 .
.
Угловую скорость шатуна относительно полюса А находим по формуле
 рад/с.
рад/с.
Заметим, что угловая скорость шатуна вокруг полюса равна абсолютной угловой скорости.
Далее, зная угловую скорость шатуна, найдем скорость точки М в соответствии с теоремой сложения скоростей для этой точки
 . (8.2)
. (8.2)
Относительную скорость  можно найти по формуле
можно найти по формуле
 ,
,
или графически, основываясь на том, что относительные скорости точек пропорциональны их расстояниям до полюса. Метод построения ясен из рис. 8.2.
Из треугольника скоростей (см. рис. 8.2 внизу справа) с помощью измерений по масштабу находим
 м/с.
м/с.
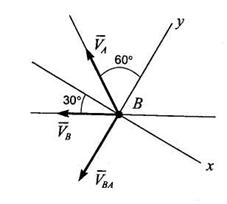
Рис. 8.3
Задачу можно решить и без построения треугольника скоростей, например, методом проекций. Найдем скорость точки В шатуна следующим образом: в точке В построим систему координат Вху (рис. 8.3), которая имеется и на рис. 8.2. Изобразим векторы скоростей  и и отметим величины углов (рис. 8.3). Далее, спроектируем векторное уравнение
и и отметим величины углов (рис. 8.3). Далее, спроектируем векторное уравнение

на ось Вх.
 .
.
Отсюда следует, что скорость точки В по величине равна скорости точки А. Если спроектировать указанное уравнение на вертикальную ось, то сразу определяется относительная скорость  и, следовательно, угловая скорость шатуна. Эта операция предоставляется студенту для самостоятельного решения.
и, следовательно, угловая скорость шатуна. Эта операция предоставляется студенту для самостоятельного решения.
Тот же результат получится, если использовать теорему о проекциях скоростей. Так как векторы скоростей точек А и В образуют один и тот же угол с прямой А В, то эти скорости равны по величине.
Ответ: ω 2 = 1 рад/с; vB = 0,8 м/с; vM = 1,06 м/с.
Второй способ - определение скоростей точек и угловой скорости звена с помощью мгновенного центра скоростей.
На рис. 8.4 изобразим в масштабе длин кинематическую схему механизма и укажем мгновенный центр скоростей шатуна.
По построению треугольник АР 2 В равносторонний, следовательно, скорость точки В равна скорости точки А. Угловая скорость шатуна
 рад/с.
рад/с.
Скорость точки М равна
 .
.

Рис. 8.4
Расстояние Р 2 М можно определить измерением или найти по известной теореме косинусов
 .
.
И тот, и другой метод дают одинаковый результат: Р 2 М= 0,4 м. В соответствии с этим vM = 0,4 м/с.
Ответ: ω 2 = 1 рад/с; vB = 0,8 м/с; vM = 1,06 м/с.
Третий способ - разложение движения звена на два вращения.
Движение шатуна разлагаем на два вращательных движения -переносное вращение вместе с кривошипом вокруг центра О и относительное вращение вокруг центра А. Итак, точка О - центр переносного вращения, точка А - центр относительного вращения и точка Р - центр абсолютного вращения.

Рис. 8.5
Заметим, что центры переносного, относительного и абсолютного вращений лежат на одной прямой и это есть общее правило. При этом угловые скорости переносного, относительного и переносного вращений связаны соотношением
 .
.
При решении данной задачи перепишем эту формулу в таких обозначениях:
 .
.
Заметим, что из всех угловых скоростей известна только угловая скорость кривошипа Ш\, которая для шатуна является переносной угловой скоростью.
Запишем теорему сложения скоростей для точки В
 .
.
Переносная скорость точки В перпендикулярна прямой ОВ и ее величина определяется по формуле
 .
.
Расстояние ОВ измеряем, или находим геометрически, используя метрические соотношения в треугольнике ОАВ. В результате получаем ОВ = 1,06 м. Тогда переносная скорость равна 2,12 м/с. Относительная скорость направлена перпендикулярно АВ, а абсолютная скорость точки В направлена горизонтально. Этих данных достаточно для построения треугольника скоростей, который построен на рис. 8.5 вверху справа. Измеряя построенные векторы в выбранном масштабе, получаем
 м/с;
м/с;  м/с.
м/с.
Зная относительную скорость точки В, определяем угловую скорость шатуна в относительном вращении относительно кривошипа
 рад/с.
рад/с.
По этой формуле определяется только абсолютная величина относительной угловой скорости. Изобразив вектор относительной скорости  на кинематической схеме механизма (рис. 8.5), видим, что шатун вращается вокруг центра А по часовой стрелке. Это означает, что относительная угловая скорость отрицательна.
на кинематической схеме механизма (рис. 8.5), видим, что шатун вращается вокруг центра А по часовой стрелке. Это означает, что относительная угловая скорость отрицательна.
Переходим к определению скорости точки М. Теорема сложения скоростей
 .
.
Переносная скорость точки М направлена перпендикулярно прямой ОМ, относительная скорость направлена перпендикулярно прямой MB, а величины этих скоростей определяются по формулам
 .
.
После вычислений находим  м/с;
м/с;  м/с.
м/с.
Строим треугольник скоростей (рис. 8.5 внизу справа), из которого находим vM = 1,06 м/с.
Ответ: ω 2 = 1 рад/с; vB = 0,8 м / с; vM = 1,06 м/с.
Пример 2. Механизм, изображенный на рис. 8.6, называется шарнирным четырехзвенником с присоединенной диадой. Звенья механизма имеют следующие размеры: О 1 А = 0,3 м; АВ = 0,25 м; O 2 D = 0,3 м; DB = 0,2 м; О2Е= 0,3 м; O 1O2=0,6 м; DM= 0,9 м; звено О 1 А перпендикулярно О 1 О 2. Кривошип О 1 А вращается с угловой скоростью ω 1=4 рад/с по часовой стрелке. Необходимо определить угловые скорости всех звеньев механизма и скорости точек B,D, Е и М.

Рис. 8.6
Решение. Механизм работает следующим образом. При вращении кривошипа ОХА звено АВ совершает сложное плоскопараллельное движение, а второй кривошип О 2 В вращательное движение, но при этом он не делает полного оборота, а совершает колебания относительно некоторого среднего положения. Звено DM при этом скользит поступательно вдоль цилиндра Е и одновременно с этим вращается вместе с цилиндром относительно оси его вращения.
Задачу будем решать в следующем порядке. Сначала найдем угловые скорости всех звеньев и скорости заданных точек с помощью мгновенных центров скоростей. Затем найдем угловые скорости второго и третьего звена с помощью разложения движения второго звена на переносное поступательное и относительное вращательное. Далее, найдем угловые скорости четвертого и пятого звена и скорость точки М с помощью разложения движения четвертого звена на переносное вращательное и относительное поступательное. Затем найдем скорость точки М с использованием теоремы о скоростях и теоремы о проекциях скоростей.
Для выполнения намеченного плана изобразим в масштабе (1:10) кинематическую схему механизма, на которой построим МЦС звеньев и направления скоростей точек.
Мгновенные центры скоростей находим так. Совершенно очевидно, что точка А движется по окружности радиуса О 1 А, а точка В по окружности радиуса О 2 В. Скорости точек А и В направлены по касательным к соответствующим окружностям. Следовательно, МЦС второго звена лежит на пересечении прямых О 1 А и О 2 В, т.е. в точке Р 2. Сложнее определить МЦС четвертого звена. Здесь сразу определяется только направление скорости точки D, так как ее траектория есть окружность с центром в точке О 2. На четвертом звене нет никакой другой точки, кроме точки D, для которой была бы известна траектория. Поэтому поступаем следующим образом. Разлагаем движение четвертого звена на переносное вращательное вместе с цилиндром Е и относительное поступательное относительно цилиндра.
Далее, запишем теорему сложения скоростей для точки Е четвертого звена.
 .
.
Заметим, что, согласно определению, переносная скорость точки Е четвертого звена равна абсолютной скорости точки Е пятого звена. Но эта скорость равна нулю, так как является для цилиндра Е центром вращения. Таким образом, абсолютная скорость точки Е четвертого звена равна относительной скорости, направление которой известно, так как в относительном движении четвертое звено движется вдоль цилиндра прямолинейно. Дальнейшие построения понятны из рис. 8.7.
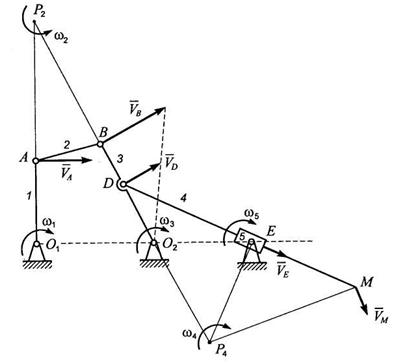
Рис. 8.7
Далее, необходимо составить алгоритм для определения угловых скоростей звеньев и скоростей точек. Для этого предварительно найдем расстояния АР 2, ВР 2, P 4 D, P 4 E и Р 4 М.
Измерения дают результаты:
АР 2 = 0,27 м; ВР 2 = 0,34 м; P 4 D = 0,6м; P 4 E =0,24 м, Р 4 М =0,4 м.
Дальнейшие вычисления производим по формулам



После вычислений получаем ответ.
Ответ: vB = 1,5 м/с; ω 2 = 4,4 м/с






