Общий вид движения судна при торможении описывается диф. уравнением:

Оно основано на парадоксе Даламбера, когда сумма всех сил равна 0, где:
m - масса судна с учётом присоединённой массы воды по оси X;
dV/dt - ускорение ("+" - при разгоне, " - " - при торможении) m dV/dt - сила инерции;
К - коэффициент сопротивления воды;
V2- скорость в продольном направлении;
К V2- сила сопротивления воды;
Ре - сила упора винта. При пассивном торможении сила упора Ре=0, тогда диф. управление принимает вид:
 .
.
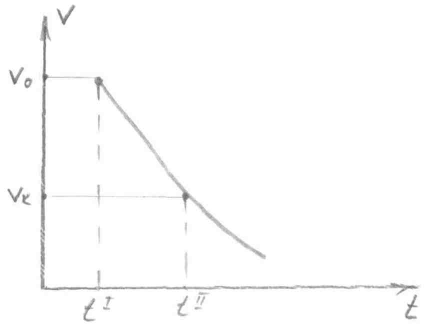
Решение диф. уравнения производится путем разделения переменных и интегрирования в пределах от Vo до Vk.
 ,
,
 ,
,
 ,
,
 ,
,
Для того, чтобы определить пройденное расстояние необходимо:
 ,
,
 ,
,
 ,
,
 ,
,
Пассивное торможение выполняется при остановленном двигателе только за счет сопротивления воды.
35. Активное торможение. Основные зависимости.
При активном торможении диф. уравнение принимает вид: 

В процессе активного торможения сила Ре изменяется по закону:,
где Vo - скорость в момент начала торможения.

1) Если Vo>Vpeв, то Vн=Vрев. Vрев - это скорость переднего хода при которой двигатель внутреннего сгорания уверенно запускается на задний ход. Поскольку Vо>Vрев процесс торможения состоит из 3-х периодов:
1 Прохождение команды t1; (=10с)
2 Пассивное торможение t2 при котором происходит падение скорости от Vо доVн.
3 Активное торможение, t3 при котором происходит падение скорости за счет упора винта, работающего на задний ход от Vн до 0
2) Если Vo < Vрев, то процесс активного торможения состоит из 3-х периодов:
1 Прохождение команды t1; (=10c)
2 Время запуска главного двигателя на ЗХ, по правилам тех. эксплуатации он составляет 15с.
3 Период активного торможения t3Введем обозначенияа - коэффициент активного торможения
 С учетом этого:
С учетом этого:

Решение этого диф. уравнения зависят только от величины а.
Активное торможение обеспечивается за счет реверсирования главного двигателя, после чего создается сила упора винта назад.
36. Классификация маневренных характеристик. Основные понятия и определения.
К основным маневренным характеристикам судна относятся:
• скорость судна при выполнении маневра;
• элементы циркуляции;
• путь и время торможения судна.
Эти характеристики определяются по результатам натурных маневренных испытаний судна после его постройки (сдаточных испытаний). Для уточнения маневренных характеристик в процессе эксплуатации судна при различных внешних условиях, состоянии корпуса и видах загрузки периодически проводятся маневренные испытания силами экипажа.
Натурные методы получения маневренных характеристик основаны на последовательных определениях места судна в процессе проведения заданных маневров по различным ориентирам либо с использованием высокоточных навигационных систем.
В процессе выполнения маневров (циркуляция, пассивное торможение с остановленным двигателем, активное торможение при реверсировании главного двигателя) через короткие промежутки времени (15—30 с), замечаемые по секундомеру, берутся пеленги и дистанции ориентира и отмечаются значения курса, скорости и оборотов винта.
За начало маневра циркуляции принимается момент начала перекладки руля, за начало торможения — момент передачи команды по машинному телеграфу. Окончанием маневра циркуляции является поворот на 360°, активного торможения — полная остановка судна, пассивного торможения — доклад рулевого о невозможности удержания судна на курсе.
Поворотливость судна. Циркуляцией называют траекторию, описываемую ЦТ судна, при движении с отклоненным на постоянный угол рулем. Циркуляция характеризуется линейной и угловой скоростями, радиусом кривизны и углом дрейфа. Угол между вектором линейной скорости судна и ДП называют углом дрейфа (?). Эти характеристики не остаются постоянными на протяжении всего маневра.
Циркуляцию принято разбивать на три периода: маневренный, эволюционный и установившийся.
Маневренный период – период, в течение которого происходит перекладка руля на определенный угол. С момента начала перекладки руля судно начинает дрейфовать в сторону, противоположную перекладке руля, и одновременно начинает разворачиваться в сторону перекладки руля. В этот период траектория движения ЦТ судна из прямолинейной превращается в криволинейную с центром кривизны со стороны борта, противоположного стороне кладки руля; происходит падение скорости движения судна.
Эволюционный период – период, начинающийся с момента окончания перекладки руля и продолжающийся до момента окончания изменения угла дрейфа, линейной и угловой скорости. Этот период характеризуется дальнейшим снижением скорости (до 30 – 50%), изменением крена на внешний борт и резким выносом кормы на внешнюю сторону.
Период установившийся циркуляции – период, начинающийся по окончании эволюционного, характеризуется равновесием действующих на судно сил: упора винта, гидродинамических сил на руле и корпусе, центробежной силы. Траектория движения ЦТ судна превращается в траекторию правильной окружности или близкой к ней.
Геометрически траектория циркуляции характеризуется следующими элементами:
Dо – диаметр установившейся циркуляции – расстояние между диаметральными плоскостями судна на двух последовательных курсах, отличающихся на 180° при установившемся движении;
Dц – тактический диаметр циркуляции – расстояние между положениями ДП судна до начала поворота и в момент изменения курса на 180°;
l1 – выдвиг – расстояние между положениями ЦТ судна перед выходом на циркуляцию до точки циркуляции, в которой курс судна изменяется на 90°;
l2 – прямое смещение – расстояние от первоначального положения ЦТ судна до положения его после поворота на 90°, измеренное по нормали к первоначальному направлению движения судна;
l3 – обратное смещение – наибольшее смещение ЦТ судна в результате дрейфа в направлении, обратном стороне перекладки руля (обратное смещение обычно не превышает ширины судна В, а на некоторых судах отсутствует совсем);
Tц – период циркуляции – время поворота судна на 360°.

Рис. 1.8. Траектория судна на циркуляции
Перечисленные выше характеристики циркуляции у морских транспортных судов среднего тоннажа при полной перекладке руля на борт можно выразить в долях длины судна и через диаметр установившейся циркуляции следующими соотношениями:
Dо = (3 ÷ 6)L; Dц = (0,9 ÷ 1,2)Dу; l1 = (0,6 ÷ 1,2)Dо;
l2 = (0,5 ÷ 0,6)Dо; l3 = (0,05 ÷ 0,1)Dо; Tц = πDо/Vц.
Обычно величины Dо; Dц; l1; l2; l3 выражаются в относительном виде (делят на длину судна L) – легче сравнивать поворотливость различных судов. Чем меньше безразмерное отношение, тем лучше поворотливость.
Скорость на циркуляции для крупнотоннажных судов снижается °с перекладкой руля на борт на 30%, а при повороте на 180° – вдвое.
Необходимо отметить и следующие положения:
а) начальная скорость оказывает влияние не столько на Dо, сколько на ее время и выдвиг, и только у высокоскоростных судов заметны Dо в большую сторону;
б) с выходом судна на траекторию циркуляции оно приобретает крен на внешний борт, значение которого по правилам Регистра не должно превышать 12 °;
в) если во время циркуляции увеличивать число оборотов ГД, то судно совершит поворот более крутой;
г) при выполнении циркуляции в стесненных условиях следует учитывать, что кормовая и носовая оконечности судна описывают полосу значительной ширины, которая становится соизмеримой с шириной фарватера.
Инерционные свойства судна. При управлении движением судна очень часто возникают ситуации, в которых необходимо изменение скорости судна: движение на акватории портов, рейдов, плавание в узкостях и по системам разделения движения, при расхождении судов в море, аварийные ситуации. Изменение скорости производится за счет изменения режима работы главного двигателя. После изменения режима работы движителей скорость судна изменяется по определенному закону, а само судно совершает неравномерное движение.
Путь и время маневра, связанного с неравномерным движением, называют инерционными характеристиками судна.
Инерционные характеристики определяются временем, дистанцией, проходимой судном за это время и скоростью хода через фиксированные промежутки времени и включают в себя следующие маневры:
• движение судна по инерции – свободное торможение;
• разгон судна до заданной скорости;
• активное торможение;
• подтормаживание.
37. Влияние ветра и течения на управляемость судна.
На надводную часть судна действует кажущийся ветер, который является суммой истинного Wи и курсового ветра 
 . Надводная и подводная часть корпуса рассматривается 2-мя свойствами:
. Надводная и подводная часть корпуса рассматривается 2-мя свойствами:
1.Равнодействующая всех сил, всегда смещается к передней кромке крыла по направлению движения.
2.Направление равнодействующей сил стремится к нормали поверхности.
С  удоводитель всегда измеряет кажущийся ветер на движущемся судне. Он характеризуется величиной курсового угла qw и скоростью W. Величина аэродинамической силы действующей на судно рассчитывается:
удоводитель всегда измеряет кажущийся ветер на движущемся судне. Он характеризуется величиной курсового угла qw и скоростью W. Величина аэродинамической силы действующей на судно рассчитывается:
 ,
,
где Са — коэффициент аэродинамичности
рв - плотность ветра
Sн - площадь проекции подводной части на ДП
W  - скорость кажущегося ветра.
- скорость кажущегося ветра.
Плечо аэродинамической силы в безразмерном виде можно рассчитывать

lо - смещение центра боковой парусности относительно ДП
Разложим Ra на Rax и Ray.
Продольная составляющая Rax вызывает изменение cопротивления, а сила Ray - боковое смещение. Под действием Ray на корпусе судна возникает ветровой дрейф с утлом a.
При движении корпуса судна с углом дрейфа на подводной его части возникает
гидродинамическая сила:  ,
,
где Cr - безразмерная сила гидродинамической силы
Р - плотность воды
Sn - площадь проекции подводной части корпуса по ДП
V - скорость судна.
Эта сила направлена в сторону противоположную Ra, а её плечо:
 ,
,
a - угол дрейфа
Поскольку моменты аэро и гидро сил направлены в противоположные стороны, то для удержания судна на курсе момент от силы на руле должен быть больше разности Мр>Ма - Mr. По этой причине при носовых курсовых углах судно управляется хорошо.
Управляемость судна при кормовых углах ветра.
При кормовых курсовых углах ветра, точка приложения аэродинамической силы смещается в сторону кормы.
П  ри появлении угла ветрового дрейфа по надводной части корпуса судна возникает поперечная гидродинамическая сила Rry - которая направлена в сторону противоположную Ray, но смещается в сторону носа от миделя. В этом случае знаки Ма и Мг совпадают. Для удержания судна на курсе необходимо переложить руль, момент которого должен скомпенсировать сумму Мр>Ма + Mr, по этой причине судно на кормовых курсовых углах ветра управляется плохо.
ри появлении угла ветрового дрейфа по надводной части корпуса судна возникает поперечная гидродинамическая сила Rry - которая направлена в сторону противоположную Ray, но смещается в сторону носа от миделя. В этом случае знаки Ма и Мг совпадают. Для удержания судна на курсе необходимо переложить руль, момент которого должен скомпенсировать сумму Мр>Ма + Mr, по этой причине судно на кормовых курсовых углах ветра управляется плохо.
Потеря управляемости.
При движении постоянным курсом, при отсутствии ветра, судно удерживается на курсе перекладками руля Sтв, вокруг ДП судна Sтв=2 - 3
При движении в условиях ветра, руль приходится перекладывать на некоторый постоянный угол Sкомпенс, который компенсирует действия внешней силы манипулировать рулём этого положения на угол Sв=10-15.

Руль как средство управления, эффективен до углов перекладки руля 35

Условие потери управляемости можно записать двумя способами либо другим способом записи является равенство:  .
.
Момент на руле больше либо равняется сумме аэро и гидродинамической сил. Если перед потерей управляемости судно приводится к ветру, то говорят, что наступает потеря управляемости первого рода. Если же при потере управляемости судно уваливается под ветер, то говорят, что наступает потеря управляемости второго рода.

Для оценки потери управляемости для каждого судна можно построить диаграмму потери управляемости:









