На каждом судне размещается значительное кол-во жидких грузов в цистернах. Для наливных транспортных судов жидкий груз является основным перевозимым грузом. Если жидкий груз цистерну полностью, т. е. цистерна запрессована, то для задач статики он ничем не отличается от любого твердого груза такой же массы. Однако если жидкий груз заполняет, лишь часть цистерны и. следовательно, имеет свободную поверхность, то он получает возможность переливаться при наклонении судна. В результате этого изменяется форма объема жидкости в цистерне и перемещается ЦТ судна, что отражается на его остойчивости.
Предположим, что в одном из отсеков судна, первоначально запрессованном, остался жидкий груз с удельным весом gжид, который в прямом положении судна заполняет отсек до уровня ВЛ, имея объем V (рис. 2.15). Если мы наклоним мысленно судно на малый угол Q, то свободная поверхность жидкости в отсеке также наклонится и займет положение В1Л1, параллельное наклонной ватерлинии В1Л1, а ЦТ жидкости g переместится в новое положение g1. Вследствие малости угла в можно считать, что перемещение ЦТ жидкости происходит по дуге круга радиусом l с центром в точке m0, в которой пересекаются линии действия силы веса жидкого груза до и после наклонения судна. Как и в случае подвешенного твердого груза, переливание жидкого груза можно представить как приложение к судну двух противоположно направленных вертикальных сил  . Эти силы создают пару сил с плечом l*sinQ, момент которой dМ = gж*V*l*sin Q уменьшает первоначальный восстанавливающий момент MB = P*h*sin Q. Таким образом, с учетом переливания жидкости в отсеке восстанавливающий момент судна равен:
. Эти силы создают пару сил с плечом l*sinQ, момент которой dМ = gж*V*l*sin Q уменьшает первоначальный восстанавливающий момент MB = P*h*sin Q. Таким образом, с учетом переливания жидкости в отсеке восстанавливающий момент судна равен:

Видно, что точку mо можно рассматривать как. метацентр жидкости в цистерне. Соответственно отрезокРис.2.15. Влияние свободной поверхности жидкого груза на начальную остойчивость судна l= mо*g является ее метацентрическим радиусом и поэтому может быть определен формулой:

60. Радионавигационные системы определения места судна. Изменяемые навигационные параметры, источники погрешностей, точность.
Общие сведения
В настоящее время в морской навигации широко используются шесть основных типов РНС:
фазовая РНС на длинных волнах ("Декка-Навигатор");
фазовая РНС на сверхдлинных волнах ("Омега");
импульсно-фазовые РНС (РСДН, «Лоран-С» и др.);
низкоорбитальные спутниковые РНС («Цикада», СССР; «Транзит». США»);
системы радиопеленговании (радиомаяки с радиопеленгаторами);
секторные радиомаяки (ВРМ-5, «Консол», «Консолан»).
Последние два типа 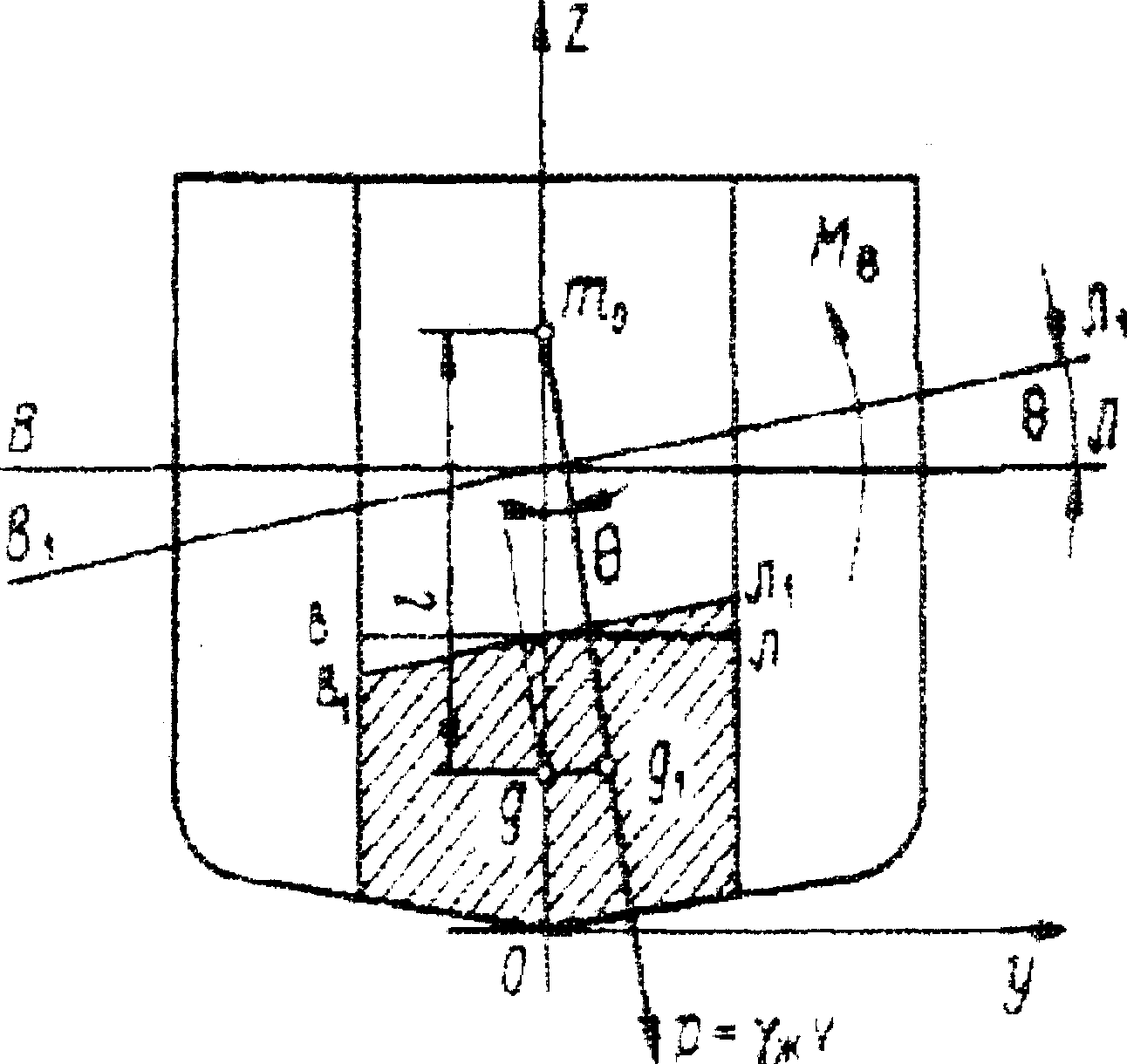 РНС относятся к амплитудным и позволяют измерять радионавигационный параметр (РНП) в виде азимутов (углов), остальные РНС — в виде разностей расстоянии до двух станций цепочки или нескольких последовательных положений спутника на орбите.
РНС относятся к амплитудным и позволяют измерять радионавигационный параметр (РНП) в виде азимутов (углов), остальные РНС — в виде разностей расстоянии до двух станций цепочки или нескольких последовательных положений спутника на орбите.
Точность определения места по РНС зависит главным образом от взаимного расположения судна и береговых станций цепочки (геометрический фактор) и ошибок в показаниях индикаторов (влияние условий распространения радиоволн, стабильности шкал времени).
Средняя квадратическая погрешность (СКП) sп линии положения (ЛП) судна, получаемая при измерении РНП с помощью указанных РНС,
 ,
,
где sр - СКП измеряемого радиотехнического параметра (разности фаз, времени, пределов угла молчания и др.) в единицах определяемой ЛП;
g - градиент ЛП, зависящий oт типа РНС.
Средняя квадратическая погрешность места судна по двум ЛП
 ,
,
где

 - СКП в определении ЛП:
- СКП в определении ЛП:
Q—угол между ЛП;
k— коэффициент корреляции.
Значения sр и k для каждого типа РНС указаны ниже. Значения g зависят от типа РНС. Для угломерной РНСg= 1/r: дальномерной g= 1; гиперболической g==2sin(g/2). В последнем выражении g — базовый угол системы, т. е. угол, под которым с судна видна база; r - расстояние до радиомаяка.
Если sр1 = sр2 = sр, тогда
 ,
,
где  - геометрический фактор РНС. Его значения для разностно-дальномерных систем в зависимости от значений базовых углов можно найти по рис. 4.4.
- геометрический фактор РНС. Его значения для разностно-дальномерных систем в зависимости от значений базовых углов можно найти по рис. 4.4.
Фазовая РНС «Декка»
Принцип работы. Стандартная цепочка системы состоит из четырех передающих станций: ведущей и трех ведомых. Некоторые цепочки имеют только две ведомых (например, цепочка 6Е, обслуживающая Финский залив).
Каждая станция цепочки излучает незатухающие колебания на заданной частоте, являющейся гармоникой основной, базисной частоты 1 f. Ведущие станции цепочек излучают колебания на частоте 6-й гармоники— 6 f (диапазон 84—86 кГц), а ведомые—на частотах 5f (диапазон 70—72 кГц), 8f (диапазон 112— 115 кГц) и 9f (диапазон 126—129 кГц). Цепочки станций отличаются друг от друга значениями базисного колебания 1 f (14— 14,4 кГц), которые имеют 63 номинала. Эти частоты нумеруются от 0 до К) с добавлением буквенных обозначений А, В, С, I), Е, F (например, 7В, SC, 2A и т. д.).
Излучение станциями цепочки колебаний различных частот позволяет принимать эти колебания раздельно с помощью 4-канального приемника. РНС «Декка» относится к фазовым системам с частотной селекцией сигналов,
Измерение разности фаз между колебаниями ведущей и ведомой станций может производиться только на одной частоте (частоте сравнения). Для этого принятые и усиленные в приемниках колебания трансформируются по частотам в наименьшие общие кратные гармоник 6 f и 5 f; 6 f и 8 f; 6 f и 9 f; т.е. в частоты 30f, 24 f и 18f соответственно.
Измерение разностей фаз между колебаниями на этих частотах сравнения определяет гиперболические изолиния положения L, которые описываются в долях фазового цикла следующим выражением:
 ,
,
где lср = v/Mf – длина волны сравнения;
здесь v — скорость распространения радиоволн на трассе от станции до судна;
b — длина базы;
rвщ — расстояние от ведущей станции до судна;
rвм—расстояние от ведомой станции до судна.
Оцифровка гипербол L от каждой пары станций (ведущая — ведомая) рассчитывается по формуле (4.8) и целые значения их наносятся на навигационные морские карты. Для различения семейств изолиний L от различных пар станций их наносят на карты разным цветом: фиолетовым—гиперболы, создаваемые на частоте сравнения 30 f; красным—гиперболы, создаваемые на частоте сравнения 24 f, и зеленым—гиперболы, создаваемые на частоте сравнения 18 f.
Расстояние между соседними гиперболами одного семейства называется фазовой дорожкой. Ширина дорожки
 .
.
Наиболее узкими дорожки будут при g=180°, т. е. на базе, когда
 .
.
Ширина фиолетовых дорожек на базе составляет около 350 м, красных 440 м и зеленых 590 м.
М дорожек каждого семейства (где М равно 30, 24 и 18) объединяются в зоны. Каждая зона обозначается латинской буквой от А до J, повторяясь после J, если зон больше десяти. К номерам гипербол зеленого цвета внутри зон искусственно добавляется число 30, поэтому их оцифровка лежит в пределах от 30 до 47. К номерам гипербол фиолетового цвета добавляется число 50 (оцифровка от 50 до 79). Номер каждой гиперболы L в пределах одной зоны сопровождается буквой этой зоны.
Например, оцифровка В-54 обозначает 4-ю гиперболу L в зоне В фиолетового семейства, F=40—10-ю гиперболу L в зоне F зеленого семейства, a D=23—23-ю гиперболу L в зоне D красного семейства. Число зон по каждому семейству гипербол равноna-j=l/m, где М равно 30, 24, 18.
Дальность действия зависит от условий распространения радиоволн и длин баз. Как правило, дальность действия ночью составляет 240 миль от ведущей станции. Днем это расстояние может достигать 400—500 миль.
Точность определения места. Случайные погрешности определяют следующим образом. При наличии на судне «Атласа зон точности определения места корабля с помощью РНС "Декка" погрешности места судна оцениваются по картам-схемам рабочих зон каждой цепочки РНС. Границы ожидаемых СКП места на картах-схемах нанесены в зависимости от освещенности ионосферы. Диаграммы градаций освещенности приводятся под картами-схемами и различаются между собой в зависимости от широты места установки цепочек РНС.
СКП места судна может определяться расчетным путем по формуле (4.6), в которую подставляются следующие значения;
— для расстояний до 100 миль от станций; k=0,4 (100-200 миль от станций); k=0,64 (200— 240 миль); k =0,72 (240 миль и далее).
Значения sy — СКП фазы колебаний сигналов в зависимости от времени суток и расстояния до береговых станций выбирают из графика (рис. 4.5). Значения базовых углов g1,2 снимают с карты для счислимого места судна.
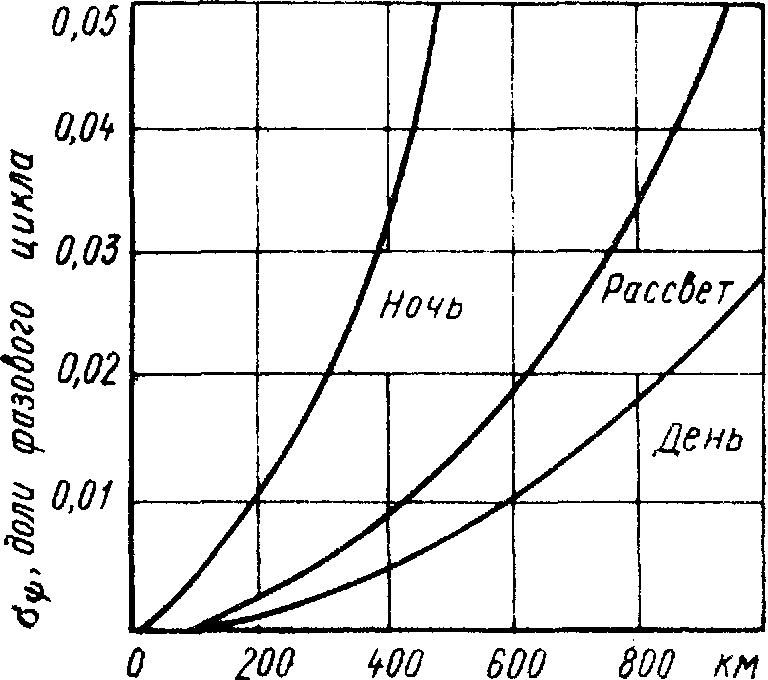
Рис. 4.5. Среднее квадратическое отклонение фазы колебаний диапазона РНС "Декка"
При наличии навигационных карт, на которых береговые станции находятся за пределами рамки, значения s1 и s2определяются из выражения:
 ,
,
где А — безразмерный коэффициент (для красного А = 5, для зеленого А=3,6 и для фиолетового А=7,8), d 1,2 - снимаемая с карты ширина фазовых дорожек в счислимом месте, в метрах.
Гиперболические изолинии положения, создаваемые РНС, рассчитываются на среднюю фазовую скорость распространения радиоволн по различным трассам. Поэтому вблизи районов с резким изменением проводимости трассы могут возникать «местные», систематические погрешности в измерениях радионавигационного параметра.
Систематические погрешности определяются в основном при калибровке цепочек РНС. Возможны районы, где такие погрешности еще не определены.
Местные, постоянные поправки на условия распространения радиоволн к отсчетам РНП опубликованы в упомянутом выше отечественном Атласе и в изданиях фирмы «Декка».
Импульсно-фазовые РНС.
Принцип работы. Импульсно-фазовые РНС работают на частоте 100 кГц и излучают пакеты радиоимпульсов. Ведущие станции излучают по 9 импульсов в пакете, ведомые по 8. Импульсы в пакетах кодируются по фазе высокочастотного заполнения, что необходимо для автоматического поиска сигналов и устранения влияния многократных отражений предыдущих импульсов в пакете на последующие. Фазовый код для радиоимпульсов ведущих станций отличается от фазового кода ведомых станций, что обеспечивает при автопоиске опознавание сигналов ведущих станций и ведомых.
Ведомые станции, входящие в одну цепочку, различаются между собой по кодовому времени задержки излучения ими пакетов радиоимпульсов относительно момента излучения ведущей станцией.
Ведомые станции в цепочках РНС «Лоран-С» обозначаются буквами W, X, Y, Z; в РНС РСДН - буквами Б, В, Г, Д. Цепочки отличаются друг от друга периодами повторения пакетов радиоимпульсов.
Обозначение (номер) цепочек состоит из числа десятков микросекунд, определяющих точное значение периода повторения сигналов данной цепочки Тп/10. Например, число 7970 обозначает цепочку РНС "Лоран-С". Норвежского моря, которая излучает сигналы с периодом повторения, равным Тп = 79700 мкс.
Излучение сигналов ведущими станциями всех цепочек «Лоран-С» синхронизировано со всемирным координированным временем (UTC).
В настоящее время работает 19 цепочек РНС «Лоран-С» и две отечественные цепочки РНС РСДН (рис. 4.6).
Современные судовые приемоиндикаторы подразделяются на автоматические и полуавтоматические.
Автоматические обеспечивают автопоиск сигналов ведущей и ведомых станций и измерение разности времени между моментами прихода сигналов от станций с точностью до 0,3 мкс. Автоматические приемоиндикаторы содержат вычислители-преобразователи гиперболических координат в географические и индицируют на табло или дисплее непосредственно эти координаты.
Полуавтоматические приемоиндикаторы (отечественный КПИ-5Ф) обеспечивают работу по сигналам станций, уровень которых превышает уровень шумов, т. е. когда возможен визуальный поиск сигналов цепочки на экране ЭЛТ.
После нахождения сигналов и установки их вручную в соответствующие точки развертки ЭЛТ включается схема автослежения, которая автоматически измеряет радионавигационный параметр с точностью до 0,3 мкс.
Дальность действия по поверхностным сигналам при распространении их над морем составляет ночью до 500—700, днем до 1000-1200 миль. Использование только поверхностных сигналов для точных измерений—главная особенность импульсно-фазовой РНС.
Использование пространственных снгналов допустимо при плавании в открытом море. При этом дальность приема таких сигналов составляет до 2300 миль от береговых станций.
Точность определения места. По поверхностным сигналам СКП определения места находится по формуле (4.6). Значения геометрического фактора определяются из рис. 4.4 причем s = (0,1: 0,3) мкс в зависимости от соотношения уровней сигнала и шума в точке приема, а
 ,
,
где v=300 м/мкс.
При расстоянии 300-500 миль от ведущей станции СКП места составляет от 60 до 200 м.
Вблизи районов с резким изменением проводимости трассы распространения радиосигналов (суша—море) возникают, как и в РНС «Декка», «местные» систематические погрешности в измерениях, Поэтому для морских районов западного и восточного побережья США изданы таблицы поправок AЫА (Additional Secondary Factor) за отклонение фазовой скорости распространения радиоволн от принятой. Максимальные поправки ASF для отсчётов радионавигационного параметра по поверхностным сигналам могут достигать до 4мкс.

Рис. 4.6. Карта-схема рабочих зон импульсно-фазового РНС на поверхностных сигналах для определения места с погрешностью не более 0,25 мили (95%)
При использовании пространственных сигналов в отсчеты необходимо вводить поправки типа SS или SG. Эти поправки публикуются в виде таблиц, предваряющих таблицы преобразования координат РНС, а также печатаются непосредственно на навигационных картах системы.
Точность определения места с использованием пространственных сигналов значительно ниже, чем при определениях по поверхностным. Поэтому данные, полученные при работе по отраженным сигналам, не рекомендуется использовать в прибрежном плавании.
Фазовая РНС «Омега»
Принцип работы. РНС «Омега» является фазовой, разностно-дальномерной системой с временной селекцией сигналов, обеспечивающей суда навигационной информацией в любой точке Мирового океана. Система работает в диапазоне очень низких частот 10—14 кГц. Береговые станции излучают сравнительно длительные посылки (~1 с) электромагнитных колебаний на частотах 10,2; 11,33; 13,6 и 11,05 кГц в заданном цикле.
Цикл временной диаграммы излучения сигналов РНС «Омега» составляет 10 с и начинается с излучения колебаний основной, навигационной частоты f1=10,2 кГц первой станцией, условно обозначенной буквой А. Начало цикла синхронизировано с сигналами UTC и приходится на ООс+10N, где N - натуральный ряд чисел.
Радионавигационное поле, перекрывающее земной шар, образуется 8 станциями. Начало посылок всех колебаний также жестко связано с всемирным временем UTC.
Семейство гиперболических изолиний рассчитывается на частоте f1=10,2 кГц, которая определяет ширину точных дорожек на базе, равной 15 км. Грубые дорожки для устранения многозначности образуются на разностных частотах F1=3,4 кГц (13,6—10,2 кГц) и F2= кГц (11,3—10,2 кГц), которые на базе равны 45 и 135 км соответственно.
Для определения места судовой приемоиндикатор должен быть засинхронизирован с циклом временной диаграммы передачи сигналов на частоте 10,2 кГц. По способу синхронизации приемоиндикаторы разделяются на автоматические и неавтоматические, в которых синхронизация осуществляется вручную с привязкой к сигналам точного времени.
После синхронизации выбирают любые пары станций, линии положения от которых пересекаются под наиболее выгодными углами. Одна из двух пар станций может быть общая. Отсчеты линий положения производятся в алфавитном порядке следования станций. Например, может быть образована пара А—Н, но не Н -А; В- Д, но не Д-В и т. д.
Прием сигналов от каждой из станций возможен на расстоянии до 6000 миль. Наилучший прием сигналов достигается от тех станций, которые находятся к западу от судна.
Точность определения места зависит от точности предвычисления поправок за суточные и сезонные изменения скорости распространения сверхдлинных радиоволн. Поправки необходимо вводить в каждый отсчет. Поэтому СКП определения места обычно составляет днем около 2 миль, ночью до 4 миль. В периоды повышения солнечной активности или аномальных явлений в ионосфере погрешность определении места увеличивается.
Средства радиопеленгования
Работа радиопеленгатора основана на свойстве рамки принимать радиосигналы, интенсивность которых зависит от направления прихода этих сигналов к плоскости рамки. Радиосигналы, приходящие с направлений, перпендикулярных плоскости рамки, рамкой не воспринисаются.
Точность пеленгования определяется в основном радиодевиацией—влиянием электромагнитных полей вторичного излучения от корпуса, такелажа и надстроек судна.
В диапазоне излучения сигналов морскими радиомаяками (255—525 кГц) основные составляющие радиодевиации f определяются и компенсируются при проведении радиодевиационных работ. Остаточные погрешности Df пеленгования, определяемые радиодевиацией, оформляются таблицей или кривой в функции от радиокурсового угла.
Ввиду наличия остаточных погрешностей радиодевиации СКП радиопеленгования в дневное время с помощью радиопеленгатора любого типа лежит в пределах 1—2°.
В диапазоне гектометровых радиоволн (2167—2197 кГц) неличина радиодевиации может иметь значительные размахи, приводящие к невозможности их компенсирования и определения стороны пеленгования. При использовании отечественных радиопеленгаторов компенсация радиодевиации в этом поддиапазоне волн не предусматривается.
Как правило, в диапазоне гектометровых радиоволн считается возможным пеленгование с точностью ±5° на носовом курсовом угле, а также радиовождение по приводу на цель пеленгования.
Плавание судна на цель пеленгования производится, выдерживая РКУ=0, и осуществляется с высокой точностью даже при значительной радиодевиации. Однако при этом плавание судна будет происходить по логарифмической спирали и путь до объекта, излучающего радиосигналы, удлиняется. Если f<30°, то путь по спирали практически мало отличается от кратчайшего.
Точность привода судна к излучателю достигает нескольких десятков метров, что требует соблюдения соответствующих мер при сближении в условиях плохой видимости.
В ночное время с расстояний более 50 миль точность радиопеленгования снижается. За час до захода и в течение часа после восхода Солнца радиопеленгование на расстояниях свыше 20 миль от радиомаяков не рекомендуется. Если угол между направлением радиосигнала и береговой чертой составляет менее 20°, возможны погрешности за счет береговой рефракции радиоволн.
61. Спутниковые системы дла определения места судна. Источники погрешностей, характеристика точности определения места.
Спутниковые навигационные системы доплеровского типа
Общие сведения. В настоящее время эксплуатируются две спутниковые навигационные системы (СНС) доплеровского типа — «Цикада» (СССР) и «Транзит» (США). Обе системы обеспечивают определение координат места судна в любое время суток и при любых метеоусловиях. Зона действия системы «Цикада»—без ограничений; системы «Транзит»— в диапазоне широт ±88°. Каждая из систем включает три основные части: командно-измерительный комплекс, искусственные спутники Земли (ИСЗ), аппаратуру потребителей.

Рис. 4.8. Элементы спутниковой навигационной системы доплеровского типа
Командно-измерительный комплекс состоит из ряда наземных станций слежения, станций передачи команд на борт ИСЗ и вычислительного центра (рис. 4.8).
В системе «Цикада» используются ИСЗ серии «Космос-1000» на орбитах, близких к круговым, с высотой около 1090—1100 км над уровнем Земли и периодом обращения порядка 108 мин; угол наклонения орбит относительно плоскости экватора составляет 83°. При таком выборе параметров орбит ИСЗ обеспечивается глобальность работы системы.
Параметры орбит спутников системы «Транзит» следующие: высота — 1075 км, период обращения — 107 мин, наклонение орбиты — практически 90°, эксцентриситет — в пределах 0,003—0,02. Количество одновременно работающих спутников в системе — до шести.
Спутники обеих систем некорректируемы, поэтому в силу различных возмущений наблюдаются смещения орбит по отношению к начальным значениям.
В силу различного характера структуры сигналов и вида модуляции, а также разноса по частоте взаимное влияние сигналов спутников системы «Цикада» и «Транзит» исключено. Однако в рамках каждой системы проявляется взаимное влияние сигналов спутников, что сказывается на качестве обсерваций, выполненных с помощью судовой аппаратуры.
Когда ИСЗ системы приближаются один к другому на расстояния, при которых разделение сигналов по частоте в судовых приемоиндикаторах затруднено, по командам с наземных станций производится выключение аппаратуры одного из спутников. Даты включения, причины и дата планируемого последующего включения спутников объявляются в навигационных предупреждениях,
Для каждой из систем средний интервал между обсервациями при пяти ИСЗ составляет от 40 до 110 мин в зависимости от широты места. На рис. 4.9 приведен график, отражающий зависимость среднего интервала между обсервациями от широты места для случаев четырех, пяти или шести спутников в системе.
Передача навигационной информации с ИСЗ проводится на двух частотных каналах 400 МГц и 150 МГц, режим передачи - непрерывный. Частоты передаваемых сигналов характеризуются высокой степенью стабильности В состав передаваемых данных, используемых для целей навигации, входят параметры, характеризующие пространственное положение ИСЗ на фиксированные моменты времени. идентификационный номер спутника, временные метки и сигналы синхронизации. Система «Цикада» работает по шкале зимнего московского времени, система «Транзит» — по шкале времени UTC.
Метод определения места. В обеих системах используется так называемый интегральный доплеровский метод, который в геометрическом смысле эквивалентен разностно-дальномерному методу. Для определения обсервованных координат используются: opбитальные параметры спутника; измеренные навигационные параметры; счислимые координаты, текущие значения курса и скорости судна.
Орбитальные параметры, получаемые по сигналам спутников, позволяют определить точное положение ИЗС в пространстве на фиксированные моменты времени.
В качестве навигационных параметров используются отсчеты измеренных доплеровских сдвигов частоты, вызванных взаимным перемещением судна и спутника во время навигационного сигнала. В судовом приемоиндикаторе значение доплеровского сдвига частоты определяется относительно частоты опорного генератора.
Зависимость доплеровской частоты от изменения расстояния «судно — ИСЗ» позволяет определить разность расстояний между судном и рядом последовательных положений ИСЗ на фиксированные моменты времени. Каждой разности расстояний в пространстве соответствует поверхность положения — гиперболоид вращения, который при пересечении с поверхностью Земли образует навигационную изолинию типа гиперболы. Таким образом, систему доплеровского типа с интегральным методом определения координат места можно рассматривать как гиперболическую систему. В качестве базы такой системы может рассматриваться расстояние пролета спутника на интервале измерения навигационных параметров. Для современных типов судовых приемоиндикаторов интервал измерения составляет 4,6; 24; 30;
60 или 120 с, длительность сеанса составляет от 8 до 16 мин.
Счислимые координаты места судна вырабатываются по данным курса и скорости судна, которые автоматически поступают от гирокомпаса и лага. Начальные значения счислимых координат и время вводятся в судовую аппаратуру вручную.
Результаты обсерваций во всех типах судовых приемоиндикаторов выдаются в форме географических координат. В приемоиндикаторах системы «Цикада» результаты выдаются в системе координат 1942 г. В приемоиндикаторах системы «Транзит» в качестве опорного принят эллипсоид WSG-72. При анализе обсерваций эти обстоятельства необходимо принимать во внимание и при работе с картами учитывать их геодезическую основу, критически оценивая полученные результаты, в особенности в прибрежных районах плавания.
Точность определения мести по сигналам СНС доплеровского типа характеризуется:
точностными характеристиками системы в целом (СКП составляет около 20 м);
точностными характеристиками приемоиндикаторов, степень совершенства которых в настоящее время определяется уровнем математического обеспечения аппаратуры;
влиянием эффектов распространения радиоволн в ионосфере и тропосфере (на стоянке СКП для двухканального приемоиндикатора составляет 40—60 м, для одноканального — 100 120 м);
погрешностью в учете курса и скорости судна во время навигационного сеанса. Погрешность в скорости в 1 уз вызывает дополнительную погрешность в координатах 0,2-0,25 мили; неточность учета курса - 0,05 мили;
погрешностью в учёте высоты антенны приёмоиндикатора над уровнем геоида, которая трансформируется в погрешность места с коэффициентом 1—3, что свидетельствует о важности учета этого параметра;
погрешностью, связанной с геометрическим фактором.
Вклад каждой из перечисленных погрешностей в значительной степени зависит от взаимного положения ИСЗ и судна. Минимальный вклад наблюдается в случае, если угол возвышения ИСЗ составляет 20—40, максимальный — при углах возвышения более 75°.
В большинстве моделей приемоиндикаторов объявленные в документации точности выдерживаются при углах возвышения 7—70°, и именно в этих случаях результаты обсерваций принимаются к автоматической коррекции счислимых координат. Обсервации при углах возвышения за пределами 7—70° могут приниматься к принудительной коррекции только после оценки результатов штурманом.
При анализе обсерваций следует иметь в виду, что при углах возвышения ИСЗ более 75° значение широты места определяется достаточно точно—в пределах нескольких кабельтовых, а погрешность долготы может достигать нескольких миль.
Точность определения времени по сигналам СНС «Цикада» и «Транзит»: во всех известных судовых приемоиндикаторах СНГ. «Транзит» погрешность индикации составляет ± 1 с, в приемоиндикаторах СНС «Цикада» ±0,5 с.








