При выполнении ряда задач, связанных с траекторным управлением, необходимо использовать информацию не только измерителей, входящих в состав СДУ, но и бортовых и наземных навигационных систем (радиотехнических, инерциальных и др.). Увеличение количества различных систем, применяемых для управления движением самолета, функциональное и конструктивное их усложнение и все более тесное взаимодействие, расширение числа режимов траекторного управления потребовали создания специализированных комплексов, объединяющих функции систем управления, навигации и боевого применения в целях решения поставленных перед ЛА задач. Такие комплексы получили наименование пилотажно-навигационных или прицельно-навигационных.
Под пилотажно-навигационным комплексом (ПНК) понимается совокупность датчиков информации и измерительных систем, систем обработки и отображения информации, систем управления, предназначенных для пилотирования и навигации летательного аппарата.
Назначение пилотажно-навигационных комплексов определяется назначением и способами применения летательных аппаратов. Поэтому различают ПНК самолетов фронтовой авиации, ПНК военно-транспортных самолетов, ПНК самолетов дальней авиации и т. д.
Основными отличительными особенностями ПНК являются:
- наличие нескольких не зависящих друг от друга каналов получения навигационных данных;
- комплексирование навигационных систем на основе применения бортовых цифровых вычислительных машин;
- использование в БЦВМ специальных алгоритмов обработки информации, позволяющих обеспечить более высокую точность и надежность навигации;
- тесная связь навигационных систем с САУ, что позволяет автоматизировать управление самолетом на относительно сложных и значительно протяженных этапах полета (маршрутный полет, наведение на воздушные и наземные цели и т. д.).
Типовой ПНК (рис.1) имеет три информационные системы, позволяющие определить координаты самолета на основе различных по физической природе измерений. Центральным связывающим звеном ПНК является вычислительная система, состоящая из одной или нескольких БЦВМ. Вычислительная система обрабатывает информацию навигационных систем и на основе ее сравнения и анализа определяет с высокой точностью координаты самолета. При этом отфильтровываются помехи, влияющие на выходные сигналы каждой из информационных систем в отдельности.

Рис.1. Схема типового ПНК
Система автоматического управления является связывающим звеном между системами навигации и управления полетом. Она обеспечивает траекторное управление самолетом в автоматическом и директорном режимах. В состав системы отображения информации ПНК входят индикаторы навигационной обстановки, картографические планшеты и пилотажно-навигационные приборы.
Одной из важных особенностей ПНК является наличие системы встроенного контроля (на рисунке не показана), предназначенной для контроля функционирования комплекса в целом, отдельных его частей и правильности решения наиболее важных задач.
Решаемые задачи в ПНК
ПНК предназначен для решения задач навигации и посадки и выдачи навигационной информации на индикаторные приборы и в САУ для выполнения автоматического, полуавтоматического или ручного управления самолетом.
ПНК обеспечивает решение следующих навигационных задач:
· Полет по заданному маршруту с выходом самолета в район заданных пунктов маршрута;
· Автоматическое счисление координат по данным инерциальных и радиотехнических измерителей;
· Определение и выдачу потребителям и на индикаторные приборы основных навигационных параметров;
· Возврат самолета на аэродром посадки;
· Выполнение предпосадочного маневра;
· Заход на посадку до высоты 40-50 м;
· Повторный заход на посадку.
Состав КН-23:
· Инерциальная курсовертикаль ИКВ-1;
· Доплеровский измеритель скорости и угла сноса ДИСС-7
· Вычислитель В-144;
· Радиотехническая система ближней навигации РСБН-6;
· Система воздушных сигналов СВС-72;
· Рама амортизационная РА-5.
Время подготовки комплекта КН-23 к вылету определяется временем готовности ИКВ-1.
В навигационном комплексе используется курсовой способ навигации, параметрами которого являются заданный курс, КУР и дальность до цели Дц или ППМ. Счисление координат Х, У производится по yорт, скорости полета, информация о которой поступает в БВН (блок вычисления навигации) от ИКВ, СВС, ДИСС. РСБН-6 связующее звено.
В зависимости от того, какой из датчиков скорости используется для счисления координат, комплекс может использоваться в инерциально- доплеровском режиме, режиме инерциального счисления координат, режим счисления по Vист от СВС, режим радиокоррекции.
Выбор оптимального режима работы комплекса в смысле наибольшей точности счисления координат производится автоматически в блоке связи БСАД РСБН без участия летчика по сигналам вычислителя «исправность СС», инерциальной курсовертикали «исправность V, V», исправность СВС и в зависимости от крена и тангажа.
Инерциально-доплеровский режим является основным режимом навигации. В этом режиме счисление ортодромических координат производится по Wx, Wz от ДИСС и yорт от ИКВ при наличии сигнала исправность СС и углах -10<g<10, -2<u<8. В блоке БСАД производится коррекция составляющих Vh, Vx.
Полет в режиме инерциального счисления ортодромического счисления координат осуществляется по составляющим Vh, Vx и yорт от ИКВ при наличии сигнала исправности Vh, Vx в следующих случаях:
При выполнении разворотов с углами крена более 10, наборе и снижении с углами тангажа более допустимых (независимо от сигналов исправности СС и исправности СВС)
При выпущенном шасси и отсутствии сигнала Исправность СС.
При включении этого режима в работу в начале счисление координат производится по составляющим Vh, Vx откорректированным по Wx, Wz (в ортодромической системе координат), полученным с вычислителя в инерциально-доплеровском режиме. Однако со временем погрешности составляющих Vh, Vx быстро возрастают и могут достигнуть недопустимых значений.
Счисление по Vист от СВС и yорт от ИКВ при наличии Исправность СВС, с убранным шасси и отсутствии Исправность СС при допустимых углах крена и тангажа.
ПНК являются неотъемлемой частью всех современных летательных аппаратов и входят в состав ПРНК - прицельно-навигационных комплексов - боевой авиации.
ПРНК обеспечивает решение прицельных и навигационных задач, а также проведение различных видов контроля комплекса при наземных подготовках.
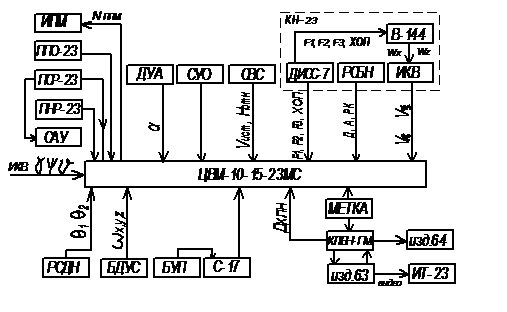
Рис.2. Принципиальная схема ПрНК-23
- ИПМ – индикатор пунктов маршрута;
- С-17 – головка визирная (С-17ВГ);
- ППО-23 – пульт подготовки оперативный;
- БУП – блок усилителей и питания;
- ПСР-23 – пульт специальных режимов;
- ПНР-23 – пульт навигационных режимов;
- «Клён-ПМ» - лазерная станция подсвета и дальнометрирования;
- «Метка» - аппаратура формирования сигналов управления;
- СУО – система управления оружием;
- «Дельта-НГ2» - аппаратура управления ракетами Х-23, Х-23М, Х-23МР при их наведении на цель;
- «Вьюга» - радиоаппаратура управления пассивными головками самонаведения ракет Х-27, Х-25МП.
Прицельные задачи:
1. Автоматическое формирование и программно-корректируемое слежение (ПКС) прицельной марки за наземной целью, а также выдача команд разрешенной и запрещенной дальности при пусках управляемых ракет Х-25, Х-25МЛ, Х-29Л, Х-29Т с различных видав маневра;
2. Автоматическое формирование положения прицельной марки, а также выдача команд на сброс бомб при различных видах маневра с прицеливанием по цели и по вынесенной точке, а также навигационное бомбометание по заранее запрограммированным объектам при отсутствии их визуальной видимости. В последнем случае обеспечивается (совместно с САУ) автоматическая боковая наводка самолета на цель;
3. Автоматическое формирование положения прицельной марки, а также выдача команд разрешенной и запрещенной дальности при стрельбе из пушек и пусках неуправляемых ракет;
4. При стрельбе из пушек, неуправляемыми ракетами и пусках управляемых ракет формирование и индикация на С-17ВГ в поле зрения летчика текущей дальности до цели и дальности эффективной стрельбы (пуска);
5. При пусках Х-29Т индикация телевизионного изображения местности на экране ИТ-23М;
6. Ручное наведение и слежение прицельной марки за целью с помощью кнюппеля аппаратуры «Метка» при пусках управляемых ракет Х-25, Х-25МЛ, Х-29Л, Х-29Т (автономный режим аппаратуры «Клён»);
Навигационные задачи решаются в основном и резервном режимах.
В основном режиме навигации обеспечивается:
1. Автоматическое счисление текущего места самолета по данным автономных средств (ИКВ, ДИСС, СВС);
2. Выполнение (совместно с САУ) маршрутного полета с заданием 10 точек (в том числе шести НИМ и четырех аэродромов) при автоматическом и директорном управлении;
3. Автоматическая коррекция счисленных координат по данным радиотехнической системы ближней навигации РСБН;
4. Автоматическая коррекция счисленных координат по данным радиотехнической системы ближней навигации РСДН;
5. Визуальная коррекция счисления координат места самолета по любому из шести заданных ППМ;
6. Оперативный полет из любой точки маршрута на любой изшести заданных ППМ по кратчайшему пути;
7. Возврат из любой точки маршрута в район аэродрома вылета при последовательном пролете ППМ в обратном порядке или возврат с любой точки маршрута в район любого из четырех заданных аэродромов (включая аэродром вылета) по кратчайшему пути;
8. «Запоминание» географических координат обнаруженной цели с возможностью повторного выхода на неё при директорном управлении самолетом;
9. Индикация в полете по маршруту дальности до любого заданного ППМ или аэродрома.
В резервном режиме навигации обеспечивается (комплексом КН-23 в составе ПРНК):
1. Автоматическое счисление текущего места самолета по данным автономных средств (ИКВ, ДИСС, СВС);
2. Выполнение (совместно с САУ) маршрутного полета с заданием семи точек (в том числе трех ППМ и четырех аэродромов);
3. Автоматическая коррекция счисленных координат места самолета по данным РСБН;
4. Возврат в район любого из четырех заданных аэродромов.
Кроме того, КН-23 обеспечивает.
1. Снижение на высоту предпосадочного маневра, выполнение предпосадочного маневра, а также захода на посадку;
2. Определение, выдачу потребителям и в САУ углов курса, крена, тангажа, КУР, АН на траектории снижения и высоте предпосадочного маневра, сигналов отклонения от равно-сигнальных зон посадочного маяка ег, ек, разовых команд.
Задачи контроля:
1. Проведение предполетного встроенного контроля систем, входящих в комплекс (а также радиовысотомера РВ и датчика углов атаки ДУА), с индикацией отказавшей системы;
2. Индикация входной информации, поступающей в ЦВМ, и выдача информации из ЦВМ в системы, входящие в комплекс или сопряженные с комплексом (стыковочный тест);
3. Предполетный контроль введенного маршрута;
4. Индикация на земле контрольной суммы введенных с помощью ППО исходных данных.








