Методы навигации
Главная промежуточная задача – определение координат МС. Исходя из этого существует три метода:
1. Обзорно-сравнительный;
2. Позиционный;
3. Счисления пути.
Первый – визуально по карте, с использованием различных визиров (РЛ, ИК, оптических). Перечисляю недостатки.
Второй (позиционный) – основан на определении координат МС по линиям положения.
На позиционном методе базируются следующие методы нахождения координат:
- радиотехнический;
- астрономический (определение положения самолета относительно ГМС – геометричесое место светил – точки на земной поверхности, на которые проецируются известные светила).
- Геомагнитный (измерение датчиками магнитного поля Земли и сравнение результатов с заранее известным распределением параметров магнитного поля на местности).
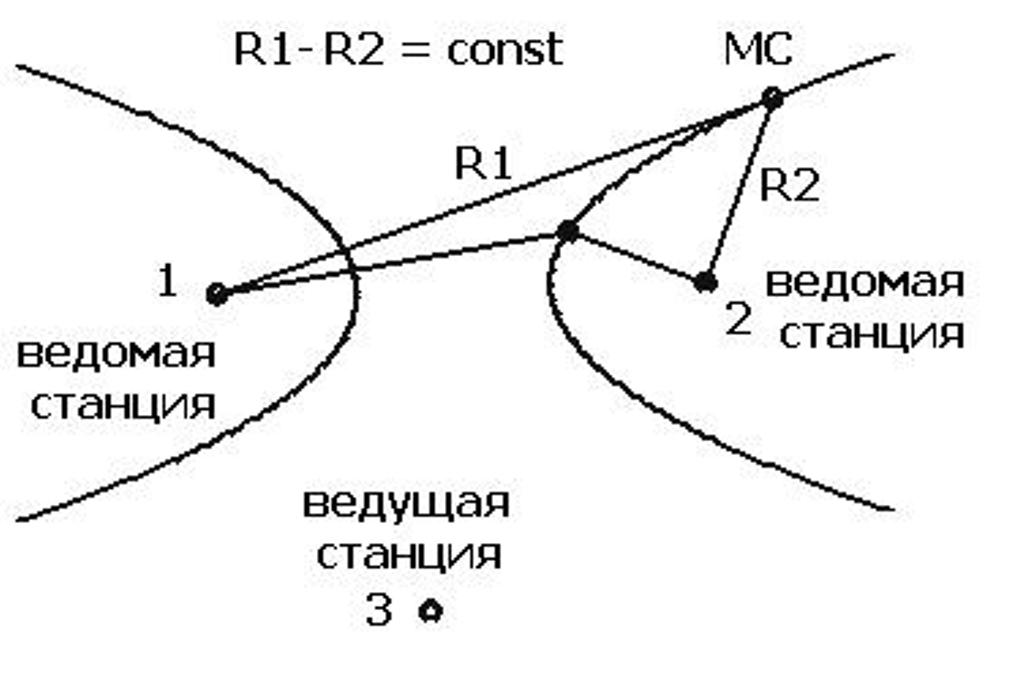
Рис.3.1. Радиотехнический метод определения
координат МС (РСДН).
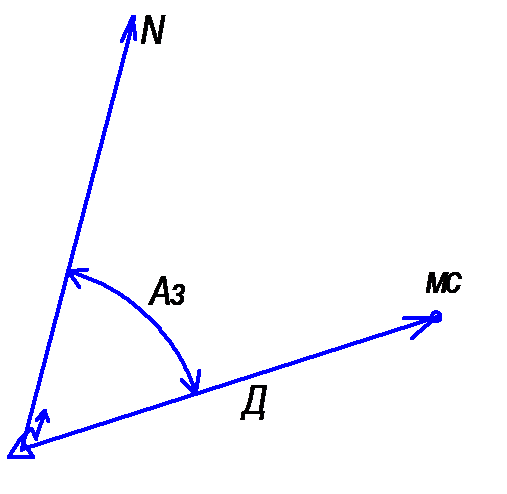
Рис.3.2. Радиотехнический метод определения
координат МС (РСБН).
Метод счисления пути
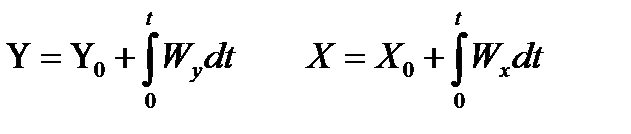
Основан на определении составляющих вектора путевой скорости полета на оси выбранной системы координат и интегрировании по времени этих составляющих для получения координат точки местонахождения ЛА и пройденного пути.
Метод счисления пути является основным методом навигации (особенно боевой).
Ψ-путевой угол, Wx, Wy – известны.
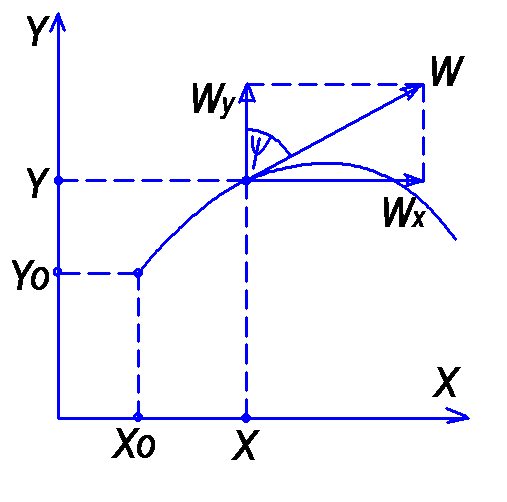
Рис.3.3. Метод счисления пути.

По физической основе методы навигации подразделяют на:
- компасный (геомагнитный);
- гироскопический;
- гиромагнитный;
- астрономический;
- радиотехнический;
- инерциальный;
- доплеровский.
3. Способы счисления пути
(20 мин)
Существуют три способа счисления пути:
- аэрометрический (курсо-воздушный);
- доплеровский;
- инерциальный.
Аэрометрический
Заключается в определении координат местоположения ЛА путем интегрирования его воздушной скорости и скорости ветра в горизонтальной системе координат.

Рис.4.1. Аэрометрический способ счисления пути.
δ – угол ветра, ψп – путевой угол.


Датчики: курсовая система, система СВС, информация о ветре от метеонаблюдений.
Направление ветра: навигационный и метеорологический ветер.
Географическая СК
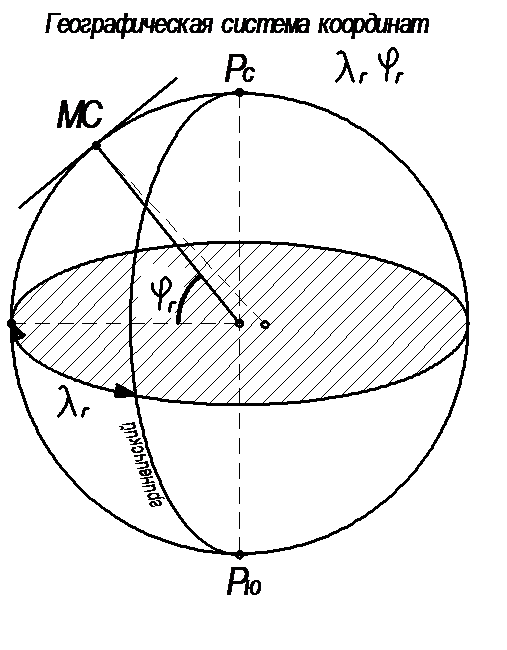
λг – географическая долгота (0 ± 180о): двугранный угол, заключенный между плоскостями начального (Гринвичского) меридиана и меридиана данной точки (М).
φг – географическая широта (0 ± 90о): угол, зключенный между плоскостью экватора и нормалью к поверхности элипсоида (геоида) в данной точке.
Фактически – ортогональная сетка меридианов и параллелей на поверхности элипсоида (геоида).
Нормальная сферическая СК
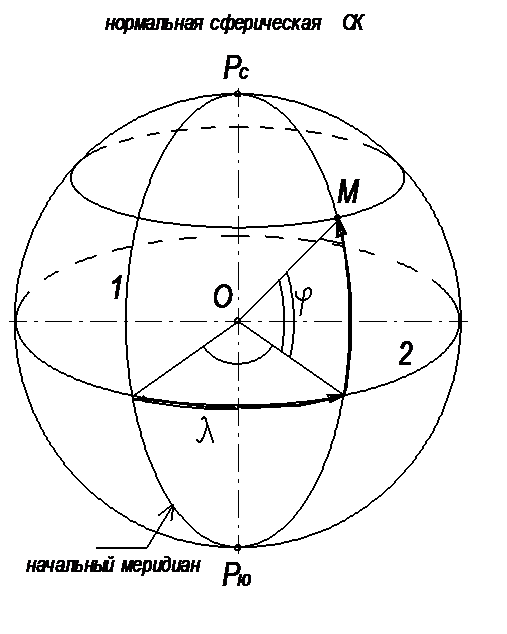
В этой системе производится замена Земного элипсоида (геоида) шаром – для облегчения расчетов.
Экватор совпадает с плоскостью географического экватора, плоскость начального меридиана совпадает с плоскостью гринвичского меридиана.
Наименование и обозначение координат: нормальная сферическая широта (φ) и нормальная сферическая долгота (λ).
Определения такие же, как для географической СК.
Ортодромическая СК
Представляет собой косую сферическую систему координат, экватор которой располагается в требуемом направлении и называется главной ортодромией (условным экватором).
Равноудаленная точка от главной ортодромии принимается за полюс Р0 ортодромической системы координат.
Параметры:
Z(z) – ортодромическая широта, линейная (угловая) мера. Для угловой меры – угол между плоскостью главной ортодромии и направлением из центра Земного шара в данную точку на его поверхности.
X(x) – ортодромическая долгота, линейная (угловая мера соответственно. Для угловой меры: двугранный угол и между плоскостью начального ортодромического меридиана и меридиана данной точки.
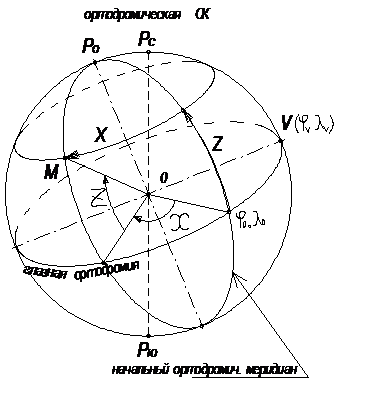
Переход от сферических систем к ортодромическим осуществляется по формулам. Параметры, определяющие связь этих СК: координаты начала точки отсчета (φо λо) и координаты вертекса V (φо λо) главной ортодромии (точки главной ортодромии с наибольшей широтой).
Нормальная земная СК (прямоугольная правая)
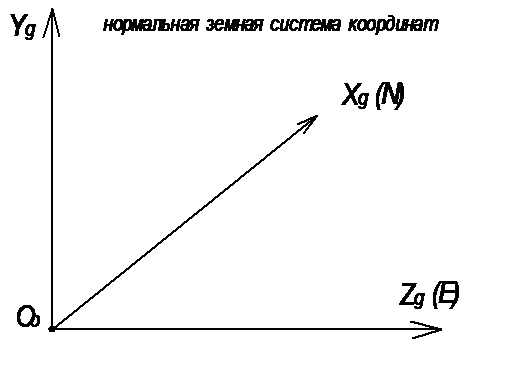
Обозначение O0 Xg Yg Zg. Точка O0 зафиксирована на поверхности Земли. Ось O0Yg – по местной вертикали вверх; OZg и OYg – в соответствии с задачей полета (например, по касательной к меридиану и параллели на север и восток соответственно).
5. Принципы построения ИНС
(45 минут)
А). Система координат
Рассматриваем ИНС платформенного типа, с платформой, стабилизированной в системе координат, связанной с Землей, при этом платформа непрерывно следит за плоскостью горизонта.
Б). Принцип действия акселерометра.
Акселерометром называется устройство для измерения ускорения движения подвижного объекта.
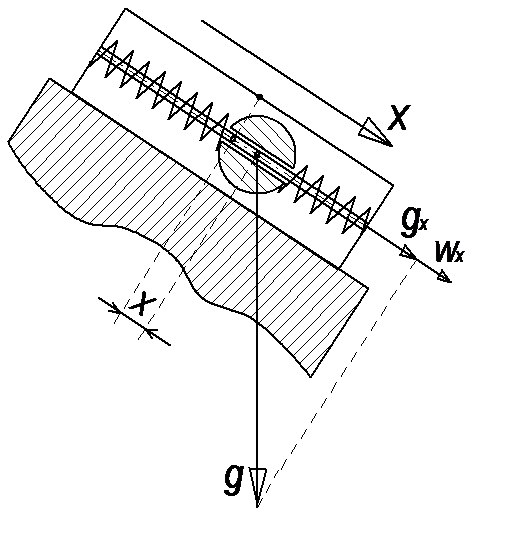
Wx – абсолютное ускорение объекта.
Из рисунка видно, что акселерометр измеряет не абсолютное (т.е. интересующее нас ускорение), а кажущееся:

Рассмотрен упрощенный случай. Кроме gx вредное влияние оказывает сила инерции Кориолиса, центробежная сила.
В). Платформа и акселерометры
Почему акселерометры должны быть установлены строго горизонтально и сколько их должно быть?
- Вектор абсолютного ускорения имеет три координаты, стало быть должно быть три акселерометра.
- Возможность моделирования маятника Шулера;
- Возможность измерения составляющих путевой скорости наиболее простым способом;
- Необходимостью уменьшения gx.
Г). Маятник Шулера. Условия невозмущаемости
точки подвеса.
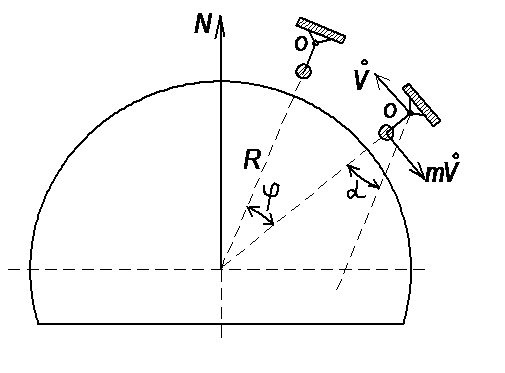
Поворот против часовой стрелки. В этом же направлении поворачивается вертикаль, проходящая через ось маятника.
Условие невозмущаемости:

или


Условие невозмущаемости окончательно:
l=R
Для малых колебаний:

Теорема Шулера (1923):
Если создать маятник с плечом, равным радиусу Земли R, а массу маятника поместить в её центр, то при движении точки подвеса с ускорением его плечо не будет отклоняться от местной вертикали.
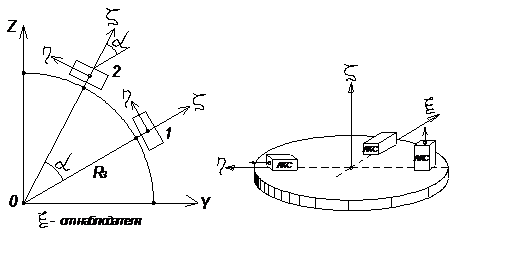
Д). Платформы с интегральной коррекцией. Физическая модель маятника Шулера

На платформе установлены акселерометры (три), гироскопы(три).
Пусть платформа движется по дуге радиуса R со скоростью Vη из точки 1 в точку 2 → поворот вокруг оси ξ необходим по часовой стрелке (знак «-»):

Поворот вокруг осей ξ и η с требуемыми угловыми скоростями осуществляют, прикладывая к гиростабилизатору с помощью датчиков моментов управляющие моменты М1 (относительно оси кси) и М2(относительно оси эта)
Тогда в соответсвии с правилом прецессии платформа будет поворачиваться угловыми скоростями:

или:

К=Н/R – условие баллистической невозмущаемости.

Е). Принципиальное отличие маятниковой коррекции от интегральной.
Объяснить различие
Ж). Гиростабилизированная платформа. (силовая гироскопическая стабилизация).
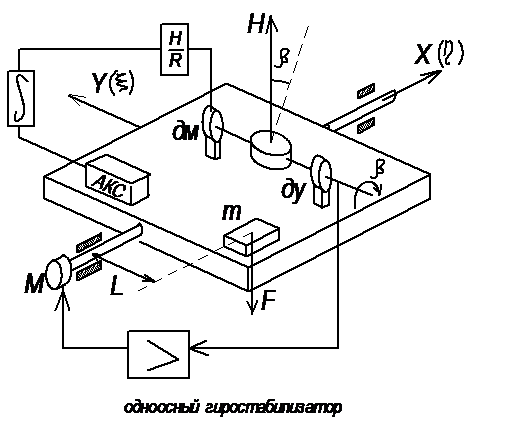
Гиростабилизаторы служат для обеспечения заданной ориентации в пространстве ряда устройств (антенн, прицелов, орудий). В том числе и акселерометров.
Стабилизируемое устройство размещают на платформе, имеющей подвес с одной, двумя или тремя осями (как в ИКВ, карданов подвес).
На рисунке: ось Х - ось стабилизации; β – угол прецессии.
F*L →Mв → β → сигнал с ДУ → Мс = Мв – прекращение прецессии.
Таким образом электродвигатель разгружает платформу.
З). Коррекция гироплатформы в азимуте.
Осуществляется за счет приложения к гироскопу гироплатформы с помощью датчика момента ДМ3 управляющего момента М3, обеспечивающего поворот платформы со скоростью:
И). Принцип действия платформенных ИНС.
1. Удержание платформы в горизонтальной плоскости за счет приложения управляющих моментов, пропорциональных скорости движения самолета, коэффициент пропорциональности определяется условием невозмущаемости платформы;
2. обеспечение требуемого закона управления платформой в азимуте;
3. вычисление скорости движения самолета путем интегрирования сигналов акселерометров.
Основа конструкции – трехосная гиростабилизированная платформа с тремя гироскопами и тремя акселерометрами.
6. Гиростабилизированная платформа
Гироплатформа представляет собой основание, помещенное в рамки карданова подвеса и имеет три степени свободы для вращения.
Карданов подвес имеет не две, а три рамы (как в АГД):
- внутренняя рама крена,
- рама тангажа,
- внешняя рама крена.
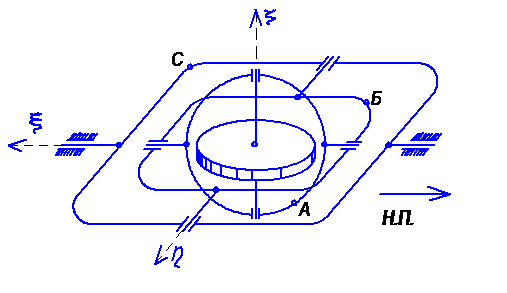
Рис.1.2. Схема расположения рамок курсовертикали КВ-1:
А – внутренняя рама крена; Б – рама тангажа; С – внешняя рама крена.
Основание с помощью оси закреплено во внутренней раме крена на шарикоподшипниках.
Оси подвеса расположены так, что ось ГП, подвешенной во внутренней раме крена, вертикальна, оси внутренней рамы крена и рамы тангажа в начальном положении горизонтальны. Ось внешней (следящей) рамы крена параллельна оси ВКР, дублирует ее и с помощью следящей системы повторяет ее движение. Следящая рама обеспечивает невыбиваемость КВ при углах тангажа 90.
Узел внутренней рамы подвешивается в раме тангажа. На оси внутренней рамы крепится ДМ-10 и СКТ крена. Внутренняя рама крена может поворачиваться в раме тангажа на угол 20 град.
Узел рамы тангажа подвешивается во внешней раме крена. На оси рамы тангажа –ДМ-10 и СКТ тангажа. Рама тангажа может поворачиваться во внешней раме крена на угол 110 град.
Внешняя рама подвешивается в корпусе. На оси внешней рамы крепятся ДМ-3 и СКТ крена.
Курсовертикаль герметична. Для улучшения теплового режима курсовериткаль заполняется гелием.
На платформе размещены три двухстепенных гироскопа типа ГБ-6. Оси чувствительности гироскопов взаимноперпендикулярны. 3Г вместе с системой разгрузки осуществляет стабилизацию платформы относительно вертикальной оси. 1Г и 2Г осуществляют стабилизацию относительно осей крена и тангажа. Оси прецессии гироскопов 1и 2 параллельны плоскости платформы, а оси собственного вращения перпендикулярны этой оси.
На платформе помимо трех ГБ-6, трех ДА-3 установлены два блока усилителей БУ-17, блок усилителей У-148, 4 диода в цепи питания ДКР-1.
Гироблок ГБ-6 состоит из:
гироузла, датчика угла ДУ-17, датчика момента ДМ-9, электродвигателя с катящимся ротором ДКР-1, системы термостабилизации.
Внутри гироблока на двух подшипниках подвешен гироузел, состоящий из рамы, на которой крепится гиромотор ГМС-5. Внутренняя полость гироузла заполнена водородом.
Гиромотор ГМС-5 представляет собой симметричный, одностаторный двигатель обращенной конструкции открытого типа. Основные узлы - статор и ротор. Ротор представляет собой стальной маховик. Обмотка статора- трехфазная.
ГМС-5 – синхронный двигатель гистерезисного типа. Вращающий момент гистерезисного двигателя можно рассматривать как сумму моментов
М=Мг+Мв
Момент от вихревых токов равен нулю при синхронном вращении ротора с магнитным полем статора и максимален при пуске. Ротор намагничивается непосредственно в поле статора. При повороте внешнего поля между ним и полюсами наведенного на роторе магнитного поля появляется пространственный сдвиг, обусловленный гистерезисом материала, и возникает электромагнитный момент. В процессе пуска и разгоне, когда ротор вращается с меньшей скоростью, чем скорость поля, ротор перемагничивается и в нем выделяются потери, пропорциональные скольжению. При синхронном вращении ротора с магнитным полем статора потери на перемагничивание ротора отсутствует, и двигатель работает как синхронный.
ДКР-1 состоит из статора и ротора. Статор представляет собой пакет, набранный из листов электротехнической стали, в пазы которого уложена обмотка. На зубцы пакета статора посажено цилиндрическое каленое ферромагнитное кольцо с пазами. Каленый ротор обкатывается по кольцу. Принцип действия ДКР-1 основан на одностороннем притяжении ротора к статору электромагнитными силами, результирующий вектор которых нормален к поверхности статора и вращается вокруг его центра, в результате чего ротор обкатывается без скольжения по поверхности статора.
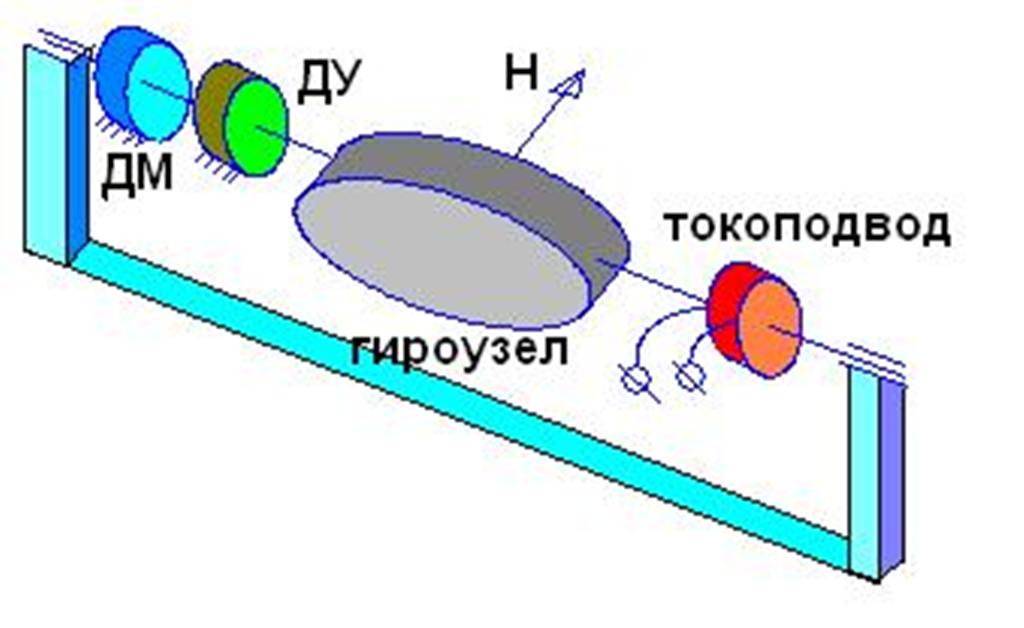
Рис.1.4. Устройство гироблока:
Акселерометры
Акселерометр (рис.2.1.) состоит из датчика ДА-3, предварительного усилителя БУ-17, усилителя У-133, преобразователя У-134 и масштабного сопротивления Rн.
Принцип действия акселерометра основан на уравновешивании инерционных сил, возникающих при действии на чувствительный элемент датчика акселерометра ускорений, силами взаимодействия электрического тока с полем постоянного магнита.
Чувствительный элемент датчика – маятник, подвешенный на цапфах, на каркасе маятника расположены две обмотки: вторичная обмотка (обмотка ротора) индукционного датчика угла и обмотка обратной связи.
При действии ускорений на маятник действует инерционный момент Ми, пропорциональный действующему ускорению, под влиянием которого маятник перемещается
Ми=КиV
Вследствие перемещения расположенной на маятнике катушки ротора датчика угла относительно статора, в катушке ротора наводится переменная ЭДС, фаза которой определяется направлением смещения чувствительного элемента от нулевого положения, следовательно, направлением действия ускорения.
Сигнал с роторной обмотки индукционного датчика угла поступает на вход усилителя БУ-17, затем усилителя У-133, где он усиливается в сигнал постоянного тока. Усилитель У-134 является преобразователем синусоидального напряжения 5В. 10кГц в прямоугольное 0,7В, является опорным для усилителя У-133.
С усилителя У-133 напряжение поступает на обмотку обратной связи. расположенную в поле постоянного магнита. и выходное сопротивление Rн.
Взаимодействие магнитного поля обмотки обратной связи с полем постоянного магнита создает момент Мос, пропорциональный величине тока в обмотке обратной связи и уравновешивающий инерционный момент
Мос=КiI
При уравновешивании моментов
КиV= КiI
направление тока в обмотке обратной связи соответствует знаку ускорения, а его значение пропорционально действующему на датчик ускорению
Напряжение, снимаемое с выходного сопротивления
Напряжение, снимаемое с масштабного сопротивления Rн, пропорционально действующему ускорению.
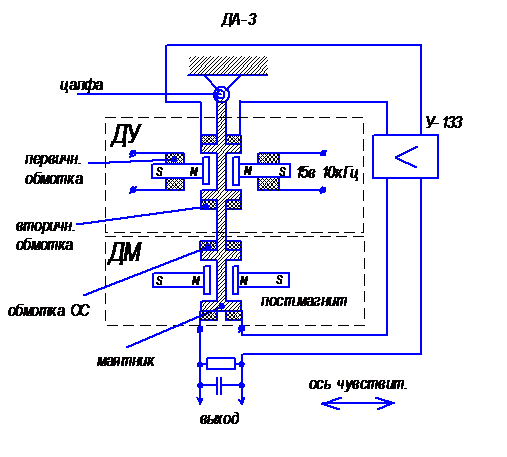
Рис.2.1. Акселерометр ДА-3.
Магнитная система акселерометра показана на рис.2.2:
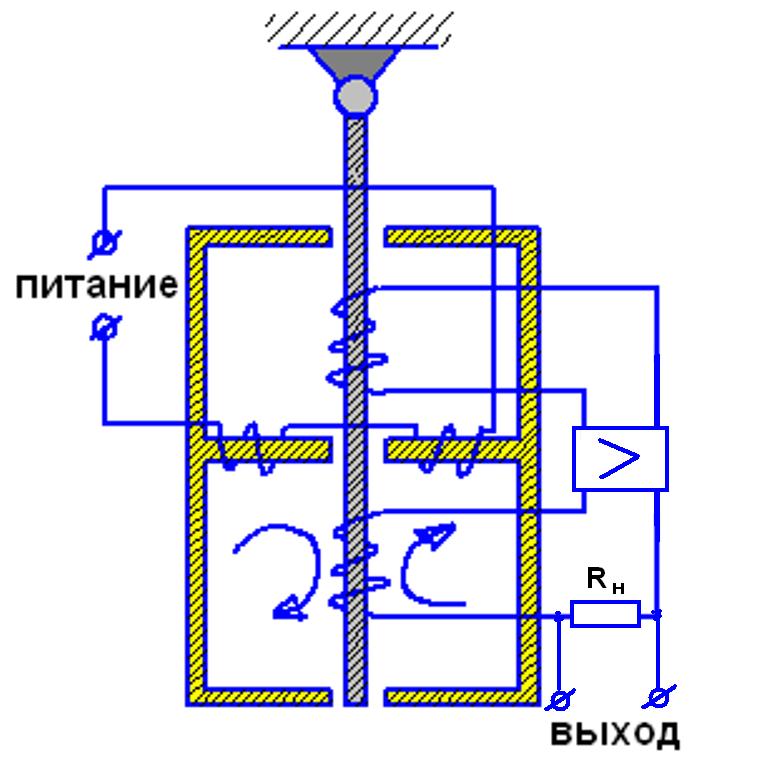
Рис.2.2. Магнитная система акселерометра
Комплект системы
1. Курсовертикаль КВ-1;
2. Блок усилителей гиродатчика БУГ-14;
3. Блок коррекции БК-20;
4. Индукционный датчик ИД-6;
5. Коррекционный механизм КМ-2;
6. Пульт начальных данных ПНД-1;
Режимы начальной выставки.
Другие названия: настройка, автоматическая подготовка ИКВ к работе.
Происходит в два этапа (два подрежима соответственно):
- ускоренный выход ГП в горизонт и в азимуте (УВ);
- точный выход ГП в горизонт и в азимуте и запоминание дрейфа гироплатформы (ТВ).
Ускоренный выход (подрежим УВ), рис.2.1.-2.3.
УВ предназначен для быстрого согласования положения ГП относительно корпуса КВ-1 и в азимуте по одному из выбранных направлений.

Рис.2.1. Ускоренный выход (управление рамой внешнего крена):
УВР – усилитель внешней рамы; ДМ-3 – датчик момента;
СКТ – синусно-косинусный трансформатор.
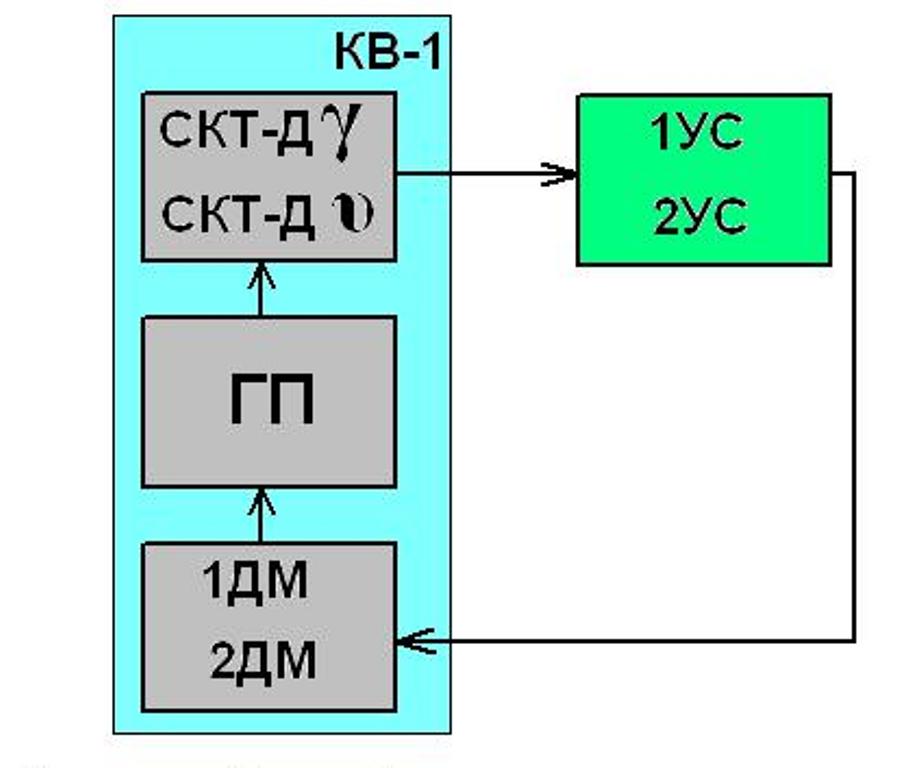
Рис.2.2.Ускоренный выход по тангажу и внутреннему крену:
ДМ – датчики моментов гироблоков; ГП – гироплатформа; УС – усилители.
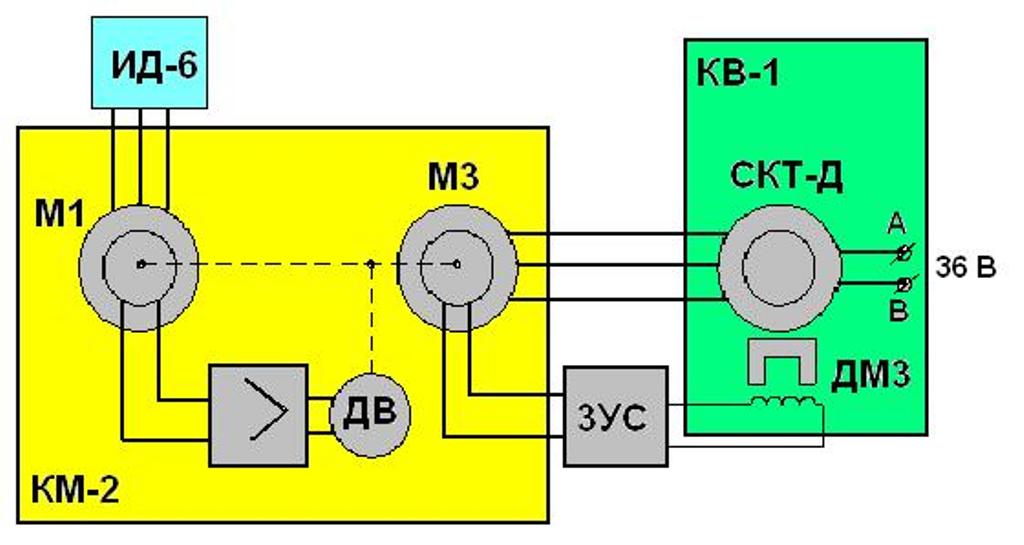
Рис.2.3. Ускоренный выход, канал курса:
ИД – индукционный датчик; КМ-2 - коррекционный механизм; ДМ – датчик момента курсового гироблока; ДВ – двигатель отработки; М1, М2, СКТ – синусно-косинусные трансформаторы; УС – усилитель.
Окончание режима УВ определяется окончанием раскрутки гиромоторов (моментом вхождения гиромоторов в синхронизм). Этому моменту соответствует минимальный ток, потребляемый гиромотором. Блок контроля выдает команду на переход к режиму ТВ.
Точный выход (подрежим ТВ)
Режим предназначен для точной выставки ГП в плоскость горизонта и в азимуте, а также для запоминания дрейфов ГП по каждой из ее осей.
В этом режиме сигнал ускорения аξ (аη) с акселерометра поступает через усилитель 1УДМ (2УДМ) на датчик момента соответствующего гироблока 1Г (2Г) по двум цепям (контурам). При этом с течением времени происходит «перекачка» сигнала в контур, содержащий интегратор.
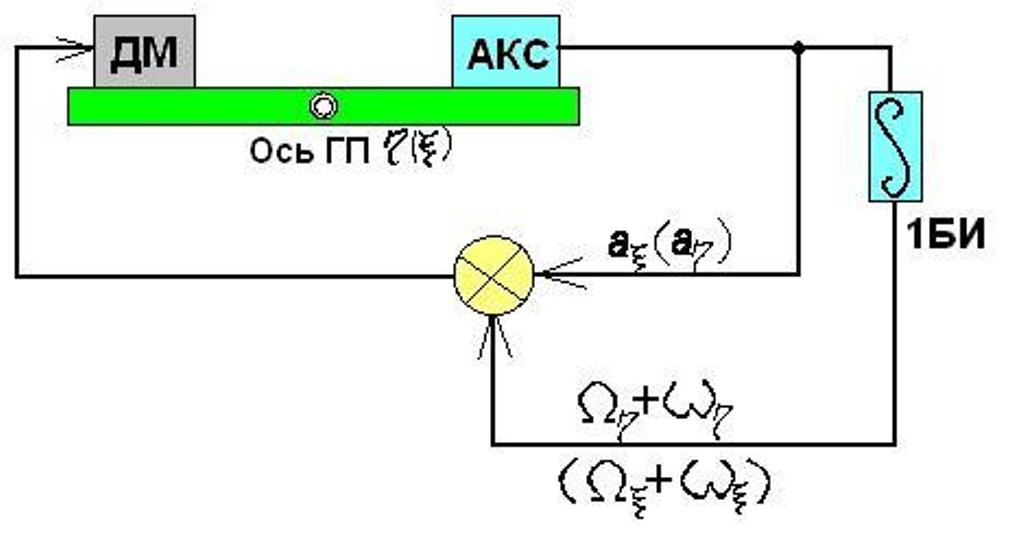
Функциональная схема для крена и тангажа (рис.2.4.):
10. –
Решаемые задачи в ПНК
ПНК предназначен для решения задач навигации и посадки и выдачи навигационной информации на индикаторные приборы и в САУ для выполнения автоматического, полуавтоматического или ручного управления самолетом.
ПНК обеспечивает решение следующих навигационных задач:
· Полет по заданному маршруту с выходом самолета в район заданных пунктов маршрута;
· Автоматическое счисление координат по данным инерциальных и радиотехнических измерителей;
· Определение и выдачу потребителям и на индикаторные приборы основных навигационных параметров;
· Возврат самолета на аэродром посадки;
· Выполнение предпосадочного маневра;
· Заход на посадку до высоты 40-50 м;
· Повторный заход на посадку.
Состав КН-23:
· Инерциальная курсовертикаль ИКВ-1;
· Доплеровский измеритель скорости и угла сноса ДИСС-7
· Вычислитель В-144;
· Радиотехническая система ближней навигации РСБН-6;
· Система воздушных сигналов СВС-72;
· Рама амортизационная РА-5.
Время подготовки комплекта КН-23 к вылету определяется временем готовности ИКВ-1.
В навигационном комплексе используется курсовой способ навигации, параметрами которого являются заданный курс, КУР и дальность до цели Дц или ППМ. Счисление координат Х, У производится по yорт, скорости полета, информация о которой поступает в БВН (блок вычисления навигации) от ИКВ, СВС, ДИСС. РСБН-6 связующее звено.
В зависимости от того, какой из датчиков скорости используется для счисления координат, комплекс может использоваться в инерциально- доплеровском режиме, режиме инерциального счисления координат, режим счисления по Vист от СВС, режим радиокоррекции.
Выбор оптимального режима работы комплекса в смысле наибольшей точности счисления координат производится автоматически в блоке связи БСАД РСБН без участия летчика по сигналам вычислителя «исправность СС», инерциальной курсовертикали «исправность V, V», исправность СВС и в зависимости от крена и тангажа.
Инерциально-доплеровский режим является основным режимом навигации. В этом режиме счисление ортодромических координат производится по Wx, Wz от ДИСС и yорт от ИКВ при наличии сигнала исправность СС и углах -10<g<10, -2<u<8. В блоке БСАД производится коррекция составляющих Vh, Vx.
Полет в режиме инерциального счисления ортодромического счисления координат осуществляется по составляющим Vh, Vx и yорт от ИКВ при наличии сигнала исправности Vh, Vx в следующих случаях:
При выполнении разворотов с углами крена более 10, наборе и снижении с углами тангажа более допустимых (независимо от сигналов исправности СС и исправности СВС)
При выпущенном шасси и отсутствии сигнала Исправность СС.
При включении этого режима в работу в начале счисление координат производится по составляющим Vh, Vx откорректированным по Wx, Wz (в ортодромической системе координат), полученным с вычислителя в инерциально-доплеровском режиме. Однако со временем погрешности составляющих Vh, Vx быстро возрастают и могут достигнуть недопустимых значений.
Счисление по Vист от СВС и yорт от ИКВ при наличии Исправность СВС, с убранным шасси и отсутствии Исправность СС при допустимых углах крена и тангажа.
ПНК являются неотъемлемой частью всех современных летательных аппаратов и входят в состав ПРНК - прицельно-навигационных комплексов - боевой авиации.
ПРНК обеспечивает решение прицельных и навигационных задач, а также проведение различных видов контроля комплекса при наземных подготовках.
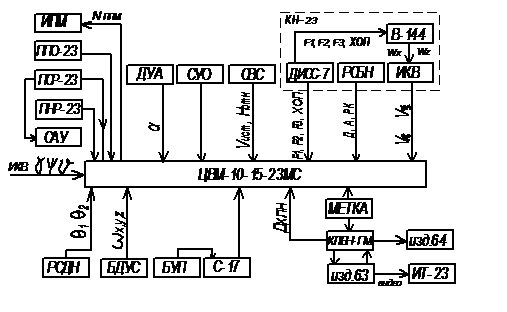
Рис.2. Принципиальная схема ПрНК-23
- ИПМ – индикатор пунктов маршрута;
- С-17 – головка визирная (С-17ВГ);
- ППО-23 – пульт подготовки оперативный;
- БУП – блок усилителей и питания;
- ПСР-23 – пульт специальных режимов;
- ПНР-23 – пульт навигационных режимов;
- «Клён-ПМ» - лазерная станция подсвета и дальнометрирования;
- «Метка» - аппаратура формирования сигналов управления;
- СУО – система управления оружием;
- «Дельта-НГ2» - аппаратура управления ракетами Х-23, Х-23М, Х-23МР при их наведении на цель;
- «Вьюга» - радиоаппаратура управления пассивными головками самонаведения ракет Х-27, Х-25МП.
Прицельные задачи:
1. Автоматическое формирование и программно-корректируемое слежение (ПКС) прицельной марки за наземной целью, а также выдача команд разрешенной и запрещенной дальности при пусках управляемых ракет Х-25, Х-25МЛ, Х-29Л, Х-29Т с различных видав маневра;
2. Автоматическое формирование положения прицельной марки, а также выдача команд на сброс бомб при различных видах маневра с прицеливанием по цели и по вынесенной точке, а также навигационное бомбометание по заранее запрограммированным объектам при отсутствии их визуальной видимости. В последнем случае обеспечивается (совместно с САУ) автоматическая боковая наводка самолета на цель;
3. Автоматическое формирование положения прицельной марки, а также выдача команд разрешенной и запрещенной дальности при стрельбе из пушек и пусках неуправляемых ракет;
4. При стрельбе из пушек, неуправляемыми ракетами и пусках управляемых ракет формирование и индикация на С-17ВГ в поле зрения летчика текущей дальности до цели и дальности эффективной стрельбы (пуска);
5. При пусках Х-29Т индикация телевизионного изображения местности на экране ИТ-23М;
6. Ручное наведение и слежение прицельной марки за целью с помощью кнюппеля аппаратуры «Метка» при пусках управляемых ракет Х-25, Х-25МЛ, Х-29Л, Х-29Т (автономный режим аппаратуры «Клён»);
Навигационные задачи решаются в основном и резервном режимах.
В основном режиме навигации обеспечивается:
1. Автоматическое счисление текущего места самолета по данным автономных средств (ИКВ, ДИСС, СВС);
2. Выполнение (совместно с САУ) маршрутного полета с заданием 10 точек (в том числе шести НИМ и четырех аэродромов) при автоматическом и директорном управлении;
3. Автоматическая коррекция счисленных координат по данным радиотехнической системы ближней навигации РСБН;
4. Автоматическая коррекция счисленных координат по данным радиотехнической системы ближней навигации РСДН;
5. Визуальная коррекция счисления координат места самолета по любому из шести заданных ППМ;
6. Оперативный полет из любой точки маршрута на любой изшести заданных ППМ по кратчайшему пути;
7. Возврат из любой точки маршрута в район аэродрома вылета при последовательном пролете ППМ в обратном порядке или возврат с любой точки маршрута в район любого из четырех заданных аэродромов (включая аэродром вылета) по кратчайшему пути;
8. «Запоминание» географических координат обнаруженной цели с возможностью повторного выхода на неё при директорном управлении самолетом;
9. Индикация в полете по маршруту дальности до любого заданного ППМ или аэродрома.
В резервном режиме навигации обеспечивается (комплексом КН-23 в составе ПРНК):
1. Автоматическое счисление текущего места самолета по данным автономных средств (ИКВ, ДИСС, СВС);
2. Выполнение (совместно с САУ) маршрутного полета с заданием семи точек (в том числе трех ППМ и четырех аэродромов);
3. Автоматическая коррекция счисленных координат места самолета по данным РСБН;
4. Возврат в район любого из четырех заданных аэродромов.
Кроме того, КН-23 обеспечивает.
1. Снижение на высоту предпосадочного маневра, выполнение предпосадочного маневра, а также захода на посадку;
2. Определение, выдачу потребителям и в САУ углов курса, крена, тангажа, КУР, АН на траектории снижения и высоте предпосадочного маневра, сигналов отклонения от равно-сигнальных зон посадочного маяка ег, ек, разовых команд.
Задачи контроля:
1. Проведение предполетного встроенного контроля систем, входящих в комплекс (а также радиовысотомера РВ и датчика углов атаки ДУА), с индикацией отказавшей системы;
2. Индикация входной информации, поступающей в ЦВМ, и выдача информации из ЦВМ в системы, входящие в комплекс или сопряженные с комплексом (стыковочный тест);
3. Предполетный контроль введенного маршрута;
4. Индикация на земле контрольной суммы введенных с помощью ППО исходных данных.
Полета САРПП-12.
Назначение
Система САРПП-12 предназначена для автоматической регистрации в полете 6-ти аналоговых и 9-ти разовых команд.
Система регистрации САРПП - 12 выпускается в основном в 4-х вариантах:
- вариант "Г" (САРПП - 12 Г)- для самолетов с одним авиадвигателем;
- вариант "В" (САРПП - 12 В) - для самолетов с двумя авиадвигателями;
- вариант "Е" (САРПП - 12 Е) - для вертолетов с одним авиадвигателем;
- вариант "Д" (САРПП - 12 Д) - для вертолетов с двумя авиадвигателями.
Все варианты отличаются между собой как составом, так и количеством регистрируемых параметров. САРПП - 12Г является основным вариантом и регистрирует следующие параметры:
В аналоговой форме - высоту барометрическую относительную, скорость приборную, перегрузку нормальную, частоту вращения ротора авиадвигателя, перегрузку продольную и угол отклонения стабилизатора. В виде разовых команд - 5 параметров виде отдельной прописи и четыре параметра методом наложения. Состав и количество разовых команд зависят от типа самолета, на котором установлена система регистрации.
В варианте "В" в пятом канале вместо параметра регистрируется частота вращения ротора авиадвигателя №2. В варианте "Е" в 3,5,6 каналах регистрируется соответственно параметры: угол отклонение ручки управления "Шаг - газ", угол тангажа вертолета и угол крена вертолета. В варианте "Д" в аналоговой форме регистрируются те же параметры, что и в варианте "Е", но разовые команды другие.
Цифра «1» в названии означает замедленную скорость протяжки фотопленки. Например: САРПП-12Д1М.
Буква «М» указывает на наличие электронного коммутатора разовых команд.
Исключение – вариант системы с названием САРПП-12-24 (имеются: электронный стабилизатор скорости протяжки пленки, что позволило достичь точности регистрации времени 0,3%; преобразователь «частота-код» в канале регистрации оборотов двигателя).
Комплект системы (Рис.2.1.)
1. Накопитель информации К12-51 с кассетой КС-0,5;
2. Устройство согласующее УсС-4-2М;
3. Датчики (состав датчиков определяется вариантом системы).
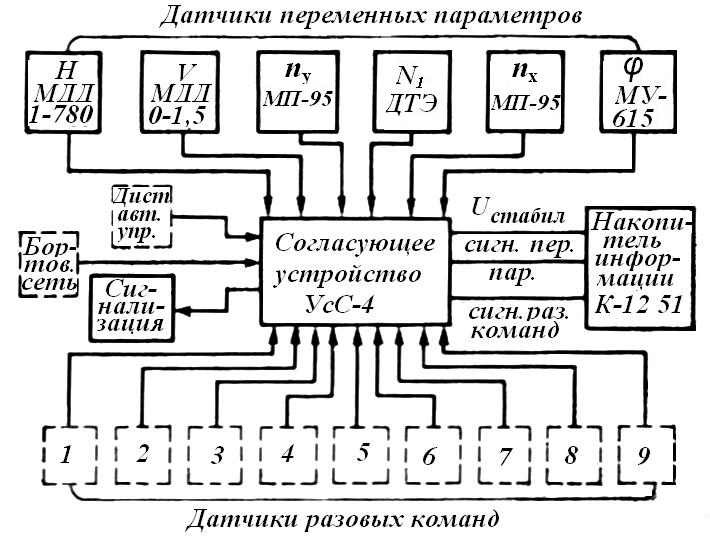
Рис.2.1. Структурная схема САРПП-12Г.
Для регистрации параметров полета системы САРПП-12Г используются специальные датчики:
1. Высоты барометрической относительной (Н) типа МДД-Те-0-780 (М – малогабаритный, Д – датчик, Д – давления, Т – тридцать вольт, е – единицы ампер, 0-780 – диапазон давлений, мм рт. ст.);
2. Скорости приборной (Vпр) типа МДД-Те-1-1,5 (1-1,5 – диапазон изменения скоростей в числах М полета);
3. Перегрузки нормальной (nу) типа МП-95 (-3,5 …+10 ед.);
4. Перегрузки продольной (nx) типа МП-95 (±1,5 ед.);
5. Отклонения стабилизатора (jст) типа МУ-615;
6. Частоты вращения ротора авиадвигателя (Nдв) типа ДТЭ-1 (Д – датчик, Т – тахометр, Э - электрический).
Накопитель К12 – 51 представляет собой светолучевой осциллограф. К12 – 51 помещен в контейнер. Внутри смонтированы:
- центральный осветитель;
- лампы для регистрации РК;
- лентопротяжный механизм с двигателем постоянного тока, возбуждаемый от постоянных магнитов и питающийся от источника стабилизированного напряжения;
- отметчик времени;
- кнопка включения питания электродвигателя;
- кнопка для прописи линий обесточенных вибраторов (механических нулей);
- лампа сигнализации протяжки пленки.
Бронекассета КС – 0,5 представляет собой толстостенный стальной корпус, внутри которого помещены наматывающая и сматывающая катушки для фотопленки, а также механизм указания запаса пленки. Катушки приводятся во вращение при помощи фрикционных муфт.
В согласующем устройстве находятся:
- стабилизатор напряжения для питания датчиков;
- схема преобразования переменного напряжения датчика оборотов двигателя в постоянный ток;
- коммутатор РК;
- узел формирования РК, регистрируемых наложением на линии записи АП.
Принцип работы и устройство
Основным элементом является электромеханический шлейфовый осциллограф. Чувствительным элементом осциллографа является магнитоэлектрический гальванометр, на подвижной части которого закреплен световой отражатель - маленькое зеркальце. На рис.2.2 изображена принципиальная схема такого магнитоэлектрического гальванометра. Луч света, направленный от источника света, отражается от зеркальца гальванометра и, пройдя систему зеркал и линз осциллографа, фиксируется на фотопленке в точке. При протекании через рамку гальванометра изменяющегося по амплитуде тока подвижная часть гальванометра вместе с зеркальцем, а следовательно, и световая точка на фотопленке будут совершать вынужденный колебания, следуя за изменениями тока, причем величина поперечного смещения световой точки по полю фотопленки будет пропорциональна значения тока. Для развертки фиксируемого на фотопленке значения тока во времени, т.е. для получения осциллограммы, необходимо обеспечить равномерное продольное смещение самой фотопленке относительно световой точки. Это достигается равномерной протяжкой фотопленки с помощью лентопротяжного механизма, состоящего из электродвигателя ЭД и редуктора Ред. Редуктор с принудительно изменяемым передаточным отношением выполняет роль «коробки скоростей», позволяющей выбрать необходимую скорость движения фотопленки.
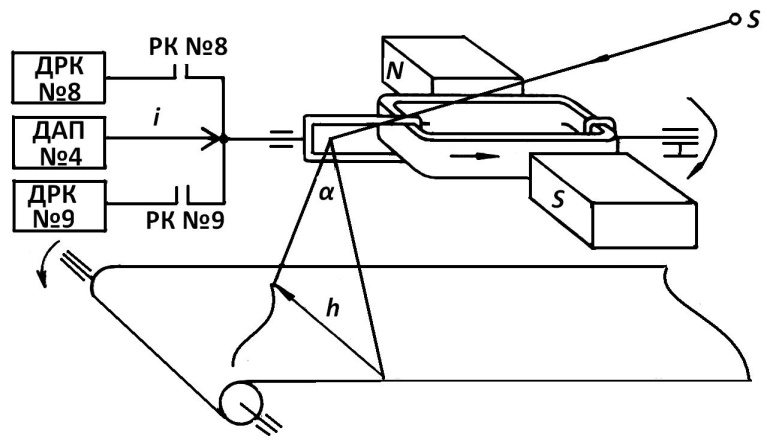
Рис.2.2 Принципиальная электрическая схема гальванометра.
ДРК - датчик разовой команды;
ДАП - датчик аналогового параметра; S - источник света.
Применение в осциллографе магнитоэлектрических гальванометров требует предварительного преобразования физических процессов регистрируемых параметров (давление жидкостей, газов, угловые положения и т.п.) в электрические сигналы постоянного тока. Такое преобразование осуществляется с помощью потенциометрических датчиков типа МДД, МП и МУ, которые одновременно выполняют и функции нормализаторов электрических сигналов за счет подачи на их потенциометры одинаковых напряжений постоянного тока 6,3В.
Для увеличения количества регистрируемых параметров осциллографы подобного типа имеют несколько гальванометров, объединенных в одном узле. Так, например, осциллограф накопителя К12-51-1 содержит шесть гальванометров G1-G6, обеспечивая тем самым одновременную регистрацию шести параметров в аналоговой форме.
При работающем лентопротяжном механизме и обесточенных рамках гальванометров, т.е. при отсутствии сигналов от датчиков системы, положение световых точек на фотопленке не меняется и на ней фиксируются следы этих точек в виде прямых линий из-за движения самой фотопленки. Одновременно у нижнего края фотопленки на определенном расстоянии с помощью неподвижной линзы «Отметчик базы» записывается прямая линия, называемая базовой линией. Эта линия принимается за начало отсчета h всех зафиксированных на фотопленке параметров.
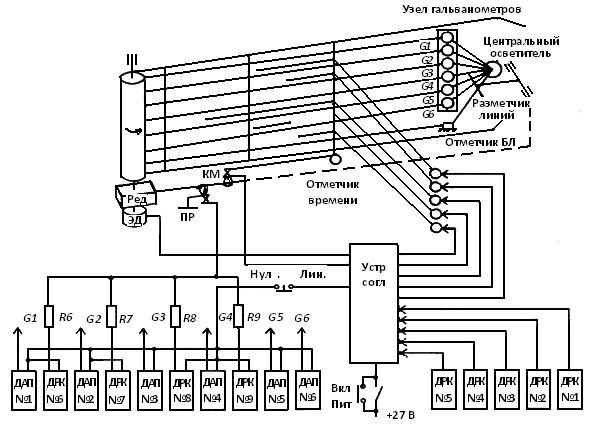
Рис. 2.3 Функциональная схема
Расположение линий записи обесточенных гальванометров относительно базовой линии на фотопленке, так называемое «положение механических нулей параметров», задается при регулировке системы. При этом учитывают величины диапазонов изменений каждого регистрируемого параметра по ширине фотопленки и знак его изменения. Расстояния линий записи механических нулей гальванометров G1-G6 до базовой линии записываются в паспорт системы подрегулируются в процессе технической эксплуатации при выполнении регламентных работ. В процессе регистрации линий записи параметров пересекаются одна с другой по всей ширине фотопленки. В этом случае без соответствующей разметки линий невозможно определить их принадлежность к тому или другому параметру. В целях облегчения расшифровки записей полетной информации в системе регистрации параметров САРПП-12 применяется метод разрывности линий записи аналоговых параметров, а также и базовой линии. Этот метод реализуется с помощью устройства «Разметчик линий», которое представляет собой флажо








