Автоматы регулирования управления. Так принято называть автоматические устройства, которые, будучи включенными в механическую систему управления рулевыми органами, изменяют ее параметры для того, чтобы обеспечить единообразную технику пилотирования самолетом на различных режимах полета.
Когда мы говорили об управляемости самолета, то не затрагивали участия летчика в процессе управления, т. е. полагали исходным моментом управления отклонение рулевой поверхности. В действительности же управляемость следует начинать рассматривать с ощущений летчика, возникающих при перемещении им рычагов управления. Летная практика показывает, что при воздействии на рычаги управления летчик лучше чувствует усилия на рычаге, нежели его перемещение. Возникший же при управлении маневр самолета он воспринимает в виде угловой скорости вращения или перегрузки. Для летчика удобно, если самолет на всех режимах полета будет отвечать примерно одинаковой реакцией по угловой скорости или перегрузке на одно и то же управляющее усилие.
Для продольного управления сверхзвуковыми самолетами наиболее характерным параметром является нормальная перегрузка, а при боковом управлении (по крену) и продольном управлении тяжелыми дозвуковыми самолетами летчик лучше воспринимает угловую скорость вращения.
Так как автоматы регулирования управления нашли наибольшее применение в каналах продольного управления истребителей, в дальнейшем ограничимся рассмотрением именно этого случая.
Если не принимать во внимание динамику управления перегрузкой, а рассматривать только ее установившееся значение при определенных воздействиях летчика, то мы будем иметь дело с так называемыми статическими характеристиками управляемости, которые задаются в виде градиентов, характеризующих усилие на ручке управления ΔР или ее перемещение ΔХ:, необходимые для увеличения перегрузки на единицу, т. е. коэффициентов

 ;
; 
Летная практика показывает, что наилучшими значениями указанных параметров для истребителя являются: Р"у = 30 -50Н, Хпку = 10--20 мм. Поддержание неизменными этих значений при изменении режима полета и является главной задачей автоматов регулирования управления (АРУ).
Типовая схема механической системы управления легкого сверхзвукового самолета включает следующие основные элементы (рис. 8): ручку управления (РУ), загрузочный механизм (ЗМ), механизм триммирования (МТ), функционирующий при нажатии кнопки «Триммер» (Кн), механические тяги и необратимый гидроусилитель — рулевой привод (РП).
При управлении через необратимый гидроусилитель весь шарнирный момент руля (или поворотного стабилизатора) воспринимается рулевым приводом и летчик в отличие от прямого управления (без гидроусилителя) не чувствует усилий на ручке создаваемых рулем. Необходимая загрузка ручки при ее отклонении обеспечивается пружинным загрузочным механизмом. Снятие усилий с ручки при ее установке в балансировочное положение осуществляется перемещением точки опоры пружины с помощью электромеханизма триммирования.

Рис.8. Схема рулевого управления
В этой системе управления, где все элементы кинематической схемы постоянны, при отклонении ручки на ΔХ возникают вполне определенные усилие и отклонение руля высоты:
ΔР = fЗМΔX:; Δδв=КРПΔХ, (2)
где fзм — жесткость пружины, КРП—механический коэффициент передачи гидроусилителя.
Для уяснения необходимости включения АРУ в эту систему управления рассмотрим более подробно зависимость перегрузки, возникающей при отклонении руля высоты, от изменения режима полета, а именно: высоты Н и скоростного напора q. Выше было показано, что при отклонении руля высоты начинается изменение угла атаки, которое прекращается при равенстве управляющего момента руля и момента статической устойчивости (для простоты здесь пренебрежем демпфирующим моментом). Из равенства М2(Δбв) =Мг(а) с учетом формул
 ΔαqS
ΔαqS 

вытекает
 ( 3)
( 3)
Отсюда, использовав выражение
 ,
,
легко получить интересующую нас зависимость
 (4)
(4)

Рис.9. Эффективность руля высоты по перегрузке
Из рис. 9 видно, что на дозвуковых скоростях полета коэффициенты mzδ, mzα сyα примерно постоянны, поэтому отношение Δnу/Δбв при М<1 линейно зависит от скоростного напора (рис.9)
Так как достижение скорости звука на разных высотах происходит при различных скоростных напорах (из-за изменения плотности воздуха ρ), то каждой высоте полета соответствует свой горизонтальный участок Δnу/Δбв.
Проведенный анализ показывает, что на различных режимах полета одному и тому же отклонению руля высоты Δбв соответствуют весьма различные приращения перегрузок Δnу, а это приведет к плохой статической управляемости, если использовать схему управления рис. 8 с постоянными параметрами. Следовательно, необходимо изменять или жесткость пружины, или коэффициент передачи от ручки к рулю с тем, чтобы при одном и том же усилии ΔР руль высоты отклонялся на различную величину в зависимости от режима полета и этим самым компенсировал непостоянство отношения Δnу/Δбв.
Наилучшим вариантом такого регулирования является одновременное изменение и жесткости пружины, и коэффициента передачи, так как при этом каждый из указанных параметров должен изменяться в меньшем диапазоне.
Одна из возможных схем АРУ показана на рис. 10, где в качестве регулирующих устройств применены электромеханизмы, изменяющие длины плеч рычагов lзм и lРП. Необходимая программа изменения этих плеч в функции q и Н может быть определена из условия постоянства отношения Δnу /ΔР, что эквивалентно постоянству коэффициента Рвny = ΔP/ Δnу. Запишем очевидное равенство:

Рис.10. Схема включения электромеханизмов АРУ в проводку управления
 (1) из рис.10 следует
(1) из рис.10 следует

 , подставив эти выражения в (1) получим
, подставив эти выражения в (1) получим

где lрп/а — коэффициент передачи рычага на рулевой привод; fзм/b—коэффициент передачи рычага на загрузочный механизм; Kрп/fзм — постоянная для данной схемы величина Теперь, если аппроксимировать зависимость Δnу/Δбв прямыми линиями, как это показано на рис. 11a, легко можно выбрать две однотипные простые программы изменения коэффициентов lрп/а и fзм/b (рис.11 б, в), которые с хорошей степенью приближения скомпенсируют изменение Δnу/Δбв и обеспечат примерное постоянство коэффициента Δnу /ΔР, в чем можно убедиться простой проверкой хотя бы крайних точек рабочего диапазона скоростных напоров qmin, qmax.
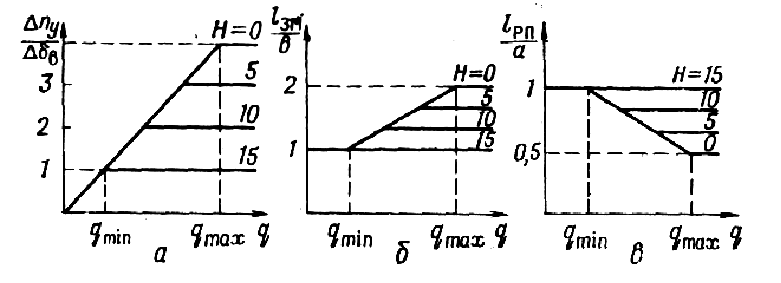
Рис.11. Упрощенная зависимость эффективности руля высоты по перегрузке (а), программы регулирования плеча на загрузочном механизме (б) и на рулевом приводе (в)
Электрическая схема АРУ содержит задатчик программы, усилитель мощности (УМ), электродвигатель и цепи обратной, связи (рис. 12).

Рис.12. Схема управления одним из электромеханизмов АРУ
Информация о высоте и скоростном напоре поступает в виде полного рп и статического рст давлений от ПВД самолета, причем измерение скоростного напора обычно осуществляется приближенно по динамическому давлению рд=рп—рст. с увеличением динамического давления мембранная коробка (МК) расширяется и перемещает ползунок задатчика программы в соответствии с наклонным участком (рис. 11).
Ограничение этого перемещения в зависимости от высоты полета происходит за счет изменения размера анероидной коробки (АК на рис. 12) и связанного с ней упора, препятствующего движению ползунка от мембранной коробки. Сигнал задатчика поступает на усилитель и обеспечивает вращение электродвигателя и выходного штока электромеханизма до тех пор, пока сигнал датчика обратной связи не скомпенсирует входной сигнал задатчика программы. Таким образом, эта схема является типичной следящей системой, в которой осуществляется синхронное изменение длины выходного штока вслед за перемещением ползунка задатчика программы. Работу АРУ летчик может контролировать по указателю (У). В некоторых АРУ при отказах блока управления предусмотрено ручное управление электромеханизмом от специального переключателя.








