Положение ЛА в пространстве может быть определено шестью координатами, три из которых характеризуют положение его центра масс, а три остальные определяют положение ЛА при движении вокруг центра масс. При этом делается допущение, что ЛА представляет собой твердое тело.
Положение центра масс задается в земной системе координат O0X0Y0Z0(рис.1) высотой полета H, дальностью L и боковым отклонением Z. Оси этой системы координат располагаются так, что О0У0 направлена вертикально вверх, О0Х0 —в заданном направлении полета, a O0Z0 образует с ними правую систему.

Рис.1. Системы координат
Однако движение центра масс ЛА зависит в конечном счете от его углового положения относительно центра масс. Угловые движения ЛА рассматриваются в системе координат, начало которой помещено в его центре масс.
Связанные с ЛА системы координат могут иметь различное направление осей. Для анализа угловых движений ЛА пользуются следующими системами (рис1):
1. Связанная «неподвижная» система координат ОХ0У0 Z0. Имеет начало в центре масс ЛА, а ее оси параллельны осям земной системы O0X0Y0Z0.
2. Связанная подвижная система координат 0X1У1Z1 начало которой также находится в центре масс ЛА, ось ОХ1 направлена вперед по продольной оси ЛА, ось ОY1,— вверх (лежит в плоскости симметрии), ось OZ 1 — в сторону правого крыла.
3. Скоростная система координат OXYZ. Ось ОХ этой системы совпадает с направлением вектора воздушной скорости V, ось OY лежит в плоскости симметрии ЛА, а ось OZ образует с ними правую систему.
Угловыми координатами ЛА являются:
— угол тангажа υ, образованный продольной осью ЛА и горизонтальной плоскостью при повороте вокруг оси OZ1;
— Угол рыскания ψ между проекцией продольной оси ЛА на горизонтальную плоскость и осью OХ0, получаемый при повороте вокруг оси OY1;
— угол крена γ, образуемый осью OZ1и горизонтальной плоскостью при повороте ЛА вокруг продольной оси.
Указанные угловые координаты ЛА определяются взаимным положением систем OX0Y0Z0 и OX1Y1Z1.Положение скоростной системы координат OXYZотносительно OX1Y1Z1задается углами атаки и скольжения. Угол атаки α образуется проекцией вектора воздушной скорости на вертикальную плоскость симметрии ЛА и его продольной осью, а угол скольжения β — вектором скорости и плоскостью симметрии ЛА. Угол между горизонтальной плоскостью и вектором скорости называется углом наклона траектории. Он обозначается буквой θ и равен разности между углами тангажа и атаки: θ = υ — α. Положительное направление отсчета угловых координат ЛА показано на рис.1 стрелками.
Изменение положения ЛА в пространстве характеризуется угловыми скоростями поворота вокруг осей ОХ1→wх, OY1→wу и OZ1→wz.
Движение ЛА в неподвижной вертикальной плоскости, связанное с изменением углов тангажа и атаки (поворот вокруг оси OZ1), называется продольным, а движение, сопровождаемое изменением углов крепа, рыскания и скольжения (поворот вокруг осей ОХ1 и OY1), — боковым. Аэродинамические свойства ЛА таковы, что продольное и боковое движения с достаточной степенью точности могут рассматриваться раздельно и независимо друг от друга.
Принципы управления, с амолет в воздухе можно считать твердым телом, движение которого происходит под действием прикладываемых к нему сил и моментов.
Обычно полное пространственное движение самолета разделяют на два движения: продольное и боковое, каждое из которых в свою очередь можно рассматривать состоящим из двух составляющих: движения центра масс и движения (вращения) вокруг центра масс.
Из второго закона механики известно, что если силы, действующие на тело, уравновешены (т. е. их сумма равна нулю), то центр масс осуществляет равномерное прямолинейное движение. Поэтому, если мы хотим управлять вектором скорости самолета, а следовательно, и траекторией его движения, то необходимо создавать управляющие силы.
Из этого же закона механики для вращательного движения следует: если уравновешены действующие на тело моменты, то его вращение вокруг центра масс либо отсутствует, либо происходит с постоянной угловой скоростью. Поэтому для изменения углового положения самолета необходимо создавать управляющие моменты. Вращение самолета обычно рассматривается происходящим вокруг осей связанной системы координат OXYZ (рис.1). Начало этой системы координат расположено в центре масс самолета. Моменты относительно связанных осей принято называть следующим образом: Мх — кренящий момент, My — момент рыскания, или путевой момент, Мг — продольный момент.
Управление продольным движением. Основными параметрами продольного движения (происходящего в вертикальной плоскости) являются: высота Н, воздушная скорость V, угол наклона траектории θ, угол тангажа υ и угол атаки α. На самолет действуют четыре силы: сила тяжести G, сила тяги двигателя Р, подъемная сила У и сила лобового сопротивления X. Силы G и Р будем считать приложенными к центру масс О самолета, а аэродинамические силы У и Х - к точке, называемой центром давления Д.
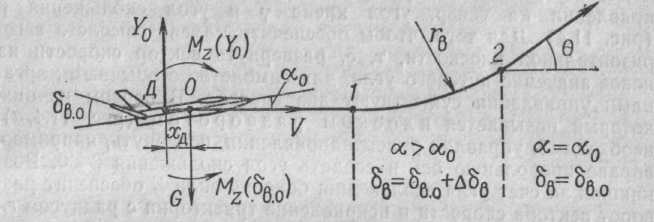
Рис.2. Продольное управление
Все эти силы изменяются в процессе полета, однако для целенаправленного управления движением используются главным образом две: тяга двигателя и подъемная сила. Далее мы не будем рассматривать управление тягой двигателя, полагая скорость полета постоянной. Пренебрежем также углом αр и будем считать, что вектор тяги Р направлен по вектору скорости V. Изменение подъемной силы можно осуществить изменением угла атаки самолета, а для этого необходимо за счет отклонения руля высоты повернуть самолет вокруг поперечной оси OZ.
Рассмотрим процесс управления самолетом, полагая исходным режимом горизонтальный полет на постоянной высоте (рис. 2). В этом режиме равновесие сил достигается за счет создания угла атаки горизонтального полета αо и соответствующей этому углу атаки подъемной силы Y0 = G, а также равенства силы тяги и силы лобового сопротивления. Для обеспечения равновесия продольных моментов большое значение имеет взаимное положение подъемной силы и силы тяжести. Обычно центр тяжести расположен впереди центра давления на расстоянии - Хд. В этом случае подъемная сила создает вращающий момент MZ(Y 0) = Y 0 Х д, который компенсируется отклонением руля высоты в балансировочное положение δВ.0 и тем самым созданием момента МZ(бв.0) =МZ(У0). Отклонение руля высоты относительно балансировочного положения будем обозначать Δбв.
Пусть теперь в точке 1 летчик отклонил руль высоты на некоторый дополнительный угол вверх; при этом возникает управляющий момент Мz(ΔδВ) и самолет, вращаясь вокруг оси OZ1, увеличивает угол атаки относительно угла атаки горизонтального полета αо. За счет избытка подъемной силы (У>0) самолет набирает высоту по криволинейной траектории (дуге с радиусом гв). Если в некоторый момент этого движения (точка 2) убрать руль высоты обратно в балансировочное положение, угол атаки установится в исходное положение αо, равновесие моментов восстановится и самолет будет набирать высоту с постоянным углом θ, т. е. прямолинейно.
Управление боковым движением. Строго говоря, боковое движение — это движение в плоскости крыла, однако мы для простоты будем считать исходным режимом полет с нулевым креном и будем рассматривать боковое движение происходящим в горизонтальной плоскости.
Основными параметрами бокового движения являются следующие углы: путевой угол Ψ и курс ψ, отсчитываемые от направления на север, угол крена γи угол скольжения β (рис. 3). Для того, чтобы обеспечить маневр самолета в горизонтальной плоскости, т. е. развернуть вектор скорости на новое значение путевого угла, для самолетов с обычными органами управления существуют два способа. В первом из них, который называется плоским разворотом (рис. 3,а), необходимо, управляя рулем направления повернуть, например, вправо продольную ось и создать угол скольжения β<0. Возникшая за счет угла скольжения боковая сила Z обеспечит разворот вектора скорости и искривление траектории с радиусом rr.
Для современных самолетов этот тип разворота применяется редко, так как скольжение нежелательно из-за ухудшения обтекания самолета, и к тому же создаваемые при скольжении боковые силы весьма невелики.

Рис.3. Боковое управление
Более эффективным и поэтому более распространенным является второй способ, который называется разворот с креном (рис. 3,б). Здесь управление происходит следующим образом: летчик, отклоняя элероны, создает момент вокруг продольной оси, и самолет начинает вращение по крену, например, вправо. При достижении нужного угла крена летчик убирает элероны в нейтральное положение и движение по крену прекращается. Возникшая при γ>0 горизонтальная составляющая подъемной силы У sin γ вызывает изменение путевого угла Ψ и ψ.







