Датчик угла представляет собой преобразователь индукционного типа и преобразует угол поворота ротора в напряжение.
Статор датчика угла состоит из магнитопровода, набранного из листов стали, и катушки возбуждения. Напряжение возбуждения подводится к лепесткам. Ротор представляет собой спрессованный каркас с лепестками, служащими для снятия выходного сигнала. В каркас уложены две сигнальные обмотки.
Переменный магнитный поток, создаваемый обмоткой возбуждения, пересекая витки обмоток ротора, соединенных встречно, наводит в них ЭДС Е1 и Е2.

Рис.1.5. Устройство датчика углов
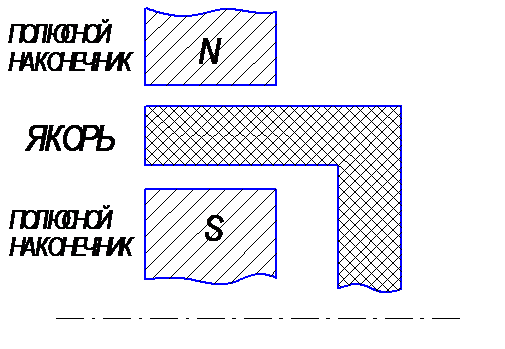
Рис.1.6. Устройство датчика углов (вид сбоку)
При нулевом положении ротора и симметричном расположении сигнальных обмоток Е1=Е2 и выходной сигнал равен нулю. При повороте ротора потокосцепление обмоток различно, а, следовательно, и различны наводимые в них ЭДС и сигнал на выходе Е2-Е1 не равен нулю.
Максимальный угол поворота датчика составляет 50. Обмотка возбуждения питается переменным током напряжением 7,5В частотой 10кГц.

Рис.1.7. Датчик моментов
В качестве моментного устройства в гироблоке используется датчик момента ДМ-9. Представляет собой магнитоэлектрический преобразователь постоянного тока, состоящий из статора и ротора. Статор представляет собой ярмо с впаянным в него магнитом с полюсным наконечником. Ротор – спрессованный каркас с лепестками (служащими для подвода тока), в который уложены две обмотки.
На обмотку с током, помещенную в магнитное поле постоянного магнита, действует сила F. Так как обмотки между собой соединены встречно, то силы F1=F2=F направлены в одну сторону, результирующая которых 2F и создает вращающий момент.
7. Электромеханические интеграторы
В качестве интегратора в системе ИКВ используется электромеханический интегратор постоянного тока (рис.4.1). Он представляет собой двигатель – генератор типа ИЭ-1МА, работающий в замкнутой схеме с двигателем.
Двигатель-генератор состоит из двухфазного асинхронного двигателя переменного тока и тахогенератора постоянного тока, расположенных на одном валу.
Входным сигналом для интегратора является напряжение Uвх, снимаемое с масштабного сопротивления акселерометра Rн
Условие работы интегратора:
ΔU=Uвх-Uтг (4.1)
ΔU – напряжение на входе усилителя интегратора
Uвх – напряжение на входе интегратора
Uтг – напряжение обратной связи с тахогенератора
Присутствие напряжения ΔU на входе усилителя интегратора объясняется наличием постоянной времени двигатель-генератора (3,5с). ΔU может достигать больших значений.
Характеристика напряжения тахогенератора в зависимости от оборотов двигателя линейна с высокой точностью (В=0,15%), т.е. напряжение на обмотке тахогенератора пропорционально развиваемой двигателем скорости.
Uтг=КтгN (4.2)
Ктг =6В на 1000об/мин – крутизна характеристики тахогенератора
из 4.1 и 4.2 следует
КтгN=Uкх±ΔU

Напряжение Uвх пропорционально ускорению ц.м.
Uвх=КаV (4.3)
тогда с учетом 4.3угол поворота вала двигателя равен

 (4.4)
(4.4)
Угол поворота вала двигатель - генератора пропорционален составляющей скорости полета.
Второй член уравнения 4.4 представляет собой погрешность интегрирования. Значение ΔU может быть уменьшено до приемлемого уровня выбором достаточно большого коэффициента усиления.
Для интегрирования с высокой точностью ускорений, действующих на акселерометр, необходимо чтобы соблюдалось равенство
 (4.5)
(4.5)
Выполнение данного равенства невозможно из – за наличия постоянной времени тахогенертора.

Рис.4.1. Электромеханический интегратор ИЭ-1МА
Акселерометры
Акселерометр (рис.2.1.) состоит из датчика ДА-3, предварительного усилителя БУ-17, усилителя У-133, преобразователя У-134 и масштабного сопротивления Rн.
Принцип действия акселерометра основан на уравновешивании инерционных сил, возникающих при действии на чувствительный элемент датчика акселерометра ускорений, силами взаимодействия электрического тока с полем постоянного магнита.
Чувствительный элемент датчика – маятник, подвешенный на цапфах, на каркасе маятника расположены две обмотки: вторичная обмотка (обмотка ротора) индукционного датчика угла и обмотка обратной связи.
При действии ускорений на маятник действует инерционный момент Ми, пропорциональный действующему ускорению, под влиянием которого маятник перемещается
Ми=КиV
Вследствие перемещения расположенной на маятнике катушки ротора датчика угла относительно статора, в катушке ротора наводится переменная ЭДС, фаза которой определяется направлением смещения чувствительного элемента от нулевого положения, следовательно, направлением действия ускорения.
Сигнал с роторной обмотки индукционного датчика угла поступает на вход усилителя БУ-17, затем усилителя У-133, где он усиливается в сигнал постоянного тока. Усилитель У-134 является преобразователем синусоидального напряжения 5В. 10кГц в прямоугольное 0,7В, является опорным для усилителя У-133.
С усилителя У-133 напряжение поступает на обмотку обратной связи. расположенную в поле постоянного магнита. и выходное сопротивление Rн.
Взаимодействие магнитного поля обмотки обратной связи с полем постоянного магнита создает момент Мос, пропорциональный величине тока в обмотке обратной связи и уравновешивающий инерционный момент
Мос=КiI
При уравновешивании моментов
КиV= КiI
направление тока в обмотке обратной связи соответствует знаку ускорения, а его значение пропорционально действующему на датчик ускорению
Напряжение, снимаемое с выходного сопротивления
Напряжение, снимаемое с масштабного сопротивления Rн, пропорционально действующему ускорению.
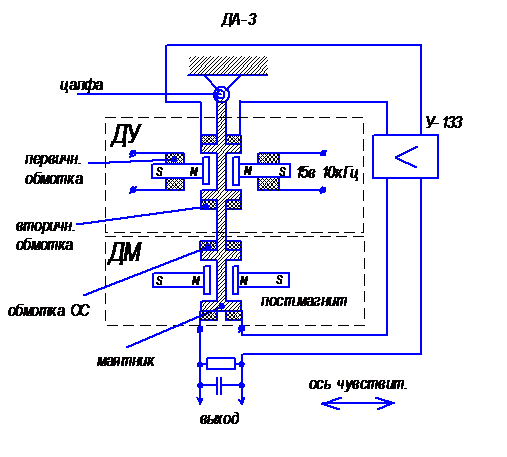
Рис.2.1. Акселерометр ДА-3.
Магнитная система акселерометра показана на рис.2.2:
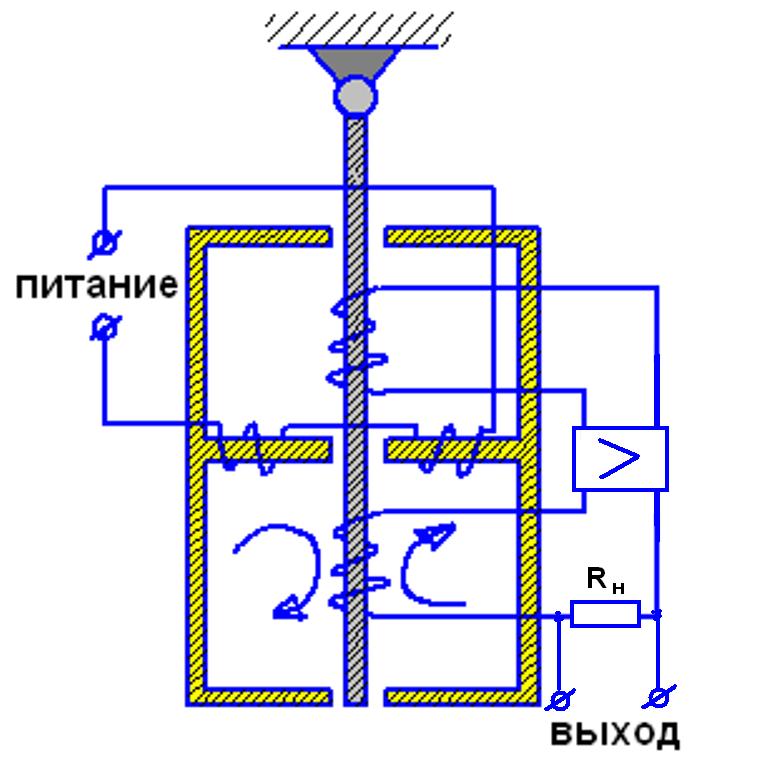
Рис.2.2. Магнитная система акселерометра








