Предназначена для установки на истребитель-бомбардировщик с целью улучшения характеристик устойчивости и управляемости самолета при ручном управлении, уменьшения влияния погодных условий, снижения утомляемости летчика, повышения безопасности скольжения и эффективности боевого применения самолета путем автоматизации практически всех режимов полета.
САУ обеспечивает:
- демпфирование короткопериодических колебаний самолета относительно ц.т. при ручном управлении во всем диапазоне углов курса, крена, тангажа.
- стабилизацию крена в диапазоне углов 7-80 град.
- стабилизацию курса при кренах меньше 7 град.
- стабилизацию Нбар.
- совмещенное управление самолетом от ручки летчика в зонах углов по крену 80 град. и танг. 35 град.
- приведение самолета к прямолинейному горизонтальному полету из любых углов крена и тангажа с последующей стабилизацией Нбар.
- автоматический полет на малых высотах от 100 до 1000 м над слабо пересеченной местностью с уклонами не более 6-10 град.
- автоматическое и директорное управление самолетом в режимах:
- полет по маршруту.
- выполнение полупетли Нестерова для бомбометания с кабрирования с последующим приведением самолета к прямолинейному горизонтальному полету со стаб. Нбар.
- возврат и снижение в районе запрограммированного аэродрома посадки
- заход на посадку на запрограммированный и незапрограммированный аэродром до высоты Н=50-60 м.
Демпфировани е КП колебаний при ручном управлении угловых скоростей вокруг самолетных осей и преобразования измерительных величин в пропорциональное отклонение рулей самолета. Демпфер САУ является 3-х канальным статическим регулятором, стремящимся уменьшить скорость самолета в результате воздействия внешних возмущений или действия летчика.
Стабилизация угловых положений самолета по курсу, крену, тангажу основана на измерении углов отклонения самолета от курса, крена, тангажа, которые были в момент включения режима автоматич. стабилизации, и преобразовании измеренных величин в отклонение соответствующих рулей.
Для обеспечения устойчивости системы «с-т – САУ» и улучшения качества переходных процессов в законы управления рулями введены демпфирующие сигналы. Для устранения статических ошибок при стабилизации крена и тангажа, возникающих из-за постоянно действующих моментов. В законы управления элеронов и стабилизатора введены интегралы ошибок за счет охвата сервопривода изодромной обратной связью. В режиме стабилизации крена канал курса работает как демпфер.
 стабилизация крена
стабилизация крена
При g<7, стабилизация y, yзад=yвкл, если переключатель РСБН-АВТ-Ручн®Авт., либо вводится в ручную на НПП.

 (*)
(*)
Апериодический фильтр сглаживает сигнал 
 где
где

Приведение к прямолинейному горизонтальному полету можно вкл. из любого режима САУ и режима ручного управления за исключением режимов захода на посадку, МВ, маневр в вертикальной плоскости. Если в момент вкл. Режима ПГ крен больше 45, то включается приведение к нулевому крену (в прод канале сохраняется режим до вкл. ПГ). При достижении крена=45, автоматически вкл. Приведение по тангажу. По окончании приведения при крене =7, тангаже=1-1,8 включается режим стабилизации Нбар. При крене меньше 7 град, включается режим стабилизации курса.
Стабилизация Нбар.
Режим стабилизации Нбар. включается кн-лампой «КВ» на пульте САУ. В горизонтальном полете при условии, что вкл. режим стабилизации тангажа, а также автоматически в режиме приведения к прямолинейному полету.
Закон управления стабилизатором в режиме стабилизации Нбар. имеет вид, аналогичный закону управления стабилизатором в режиме стабилизации тангажа, за исключением dупр

Автоматическое управление при выходе на аэродром посадки
Продольное управление:
Задача – удержание самолета в окрестности заданной прямолинейной траектории снижения
На этапе снижения (пробивания облачности) управляющий сигнал
uзад-u=Кu(Нз-Н)-(uгп+u) (**) uгп=4+_2
Отклонение высоты полета от программной вычисляется в РСБН. Принятый закон управления обеспечивает движение с-та по траектории, лежащей выше заданной. Это необходимо для плавного перехода без потери высоты на режим стабилизации высоты.
Постоянная положительная ошибка Нз-Н создается в регуляторе действием сигнала uгп+u, стремящегося вывести самолет из снижения. В установившемся режиме он уравновешивается отклонением от заданной траектории. Если uгп+u=3-4, то Нз-Н=100-150 м.
Автоматическое управление при заходе на посадку
После выхода на запрограммированный аэродром и вход самолета в зону действия курсового маяка РСБН выдает сигнал «Курс готов», по которому САУ автоматически переходит в режим захода на посадку.
Если самолет выходит на незапрограмированный аэродром, то после входа его в зону действия курсового маяка (на НПП закрывается бленкер курса) для вкл. режима
захода на посадку используется к-л «Посадка» на пульте упр. САУ.
Управление боковым движением по сигналу углового отклонения самолета от оси ВПП осуществляется через контур крена.
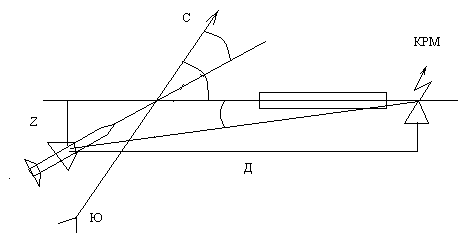
Рис.1. Боковое движение при заходе на посадку
Dy=yвпп-yeк=z/D

Рис.2. Продольное движение при заходе на посадку

Составляющая Рe обеспечивает устойчивость в контуре управления.
Сигнал отклонения по курсу при Dy<17 проходит через изодром. Поскольку в пределах линейности фильтра 1/Тyр+1 разность 1-1/Тyр+1=Тyр/ Тyр+1. При больших отклонениях Dy проходит на сервопривод и на директорную стрелку КПП за вычетом 17, т.е. результирующий сигнал Dy-ç17ç.
На начальном этапе захода на посадку самолет может входить в зону действия КРМ со сравнительно большим Dy, имея по этой причине слишком большую скорость z¢ с осью ВПП. Сигнал eк будет стремиться увеличить z¢, создавая крен в сторону ВПП. Т.к. статическая характеристика КРМ имеет ограниченную зону линейности, то eк¢, который пытался бы создать крен в противоположную сторону при входе в зону КРМ может отсутствовать. Поэтому при больших Dy необходимо пропускать пропорциональный ему сигнал на сервопривод, чтобы создать крен в сторону от ВПП и тем самым погасить избыточную скорость сближения с осью ВПП. В противном случае самолет может пересечь ось ВПП, что нежелательно. При малых отклонения от посадочного курса постоянная составляющая Dy не проходит через фильтр, что позволяет снизить влияние медленно меняющихся ошибок формирования Dy и бокового ветра. Оставление Dy¢ (при малых Dy) позволяет улучшить динамику контура.
После пересечения равносигнальной зоны глиссады маяка передаточные числа Кeк, Кέк снижаются на 30%.
Продольное движение при заходе на посадку:
Можно разделить на 2 этапа:
1 – сохраняет режим стабилизации Н, но структура управляющего сигнала претерпевает изменения. На начальном участке горизонтального полета uз-u формируется по закону (**). После включения режима «заход» (сигнал «Курс готов» из РСБН или нажатие к-н «Посадка».
Сигнал u проходит через более сложный дифференцирующий фильтр, тем самым расширяет возможность коррекции динамических свойств контура тангажа. Основное отличие в величинах передаточных чисел, при меньшей скорости полета Кuн можно увеличить.

После пресечения РЗГМ – второй этап продольного движения – снижение по глиссаде планирования. Структура управляющего сигнала не изменяется, но вместо корректора высоты занимает eг.


Постоянный сигнал С на пикирование вводится в момент пересечения глиссады и действует только на начальном этапе перехода самолета на глиссаду планирования. Проходя через изодром, он дает дополнительный сигнал на пикирование Duз пикир., обеспечивая белее быстрый переход с режима горизонтального полета на планирование.
Выключение САУ и переход на ручное управление на Н=40-50 м








