Все лекции ОА и САУ
В В Е Д Е Н И Е.. 4
ЛЕКЦИЯ № 1. 5
1.1. ПОНЯТИЕ СИСТЕМЫ И ЕЁ СВОЙСТВА.. 5
1.2. ПОНЯТИЕ УПРАВЛЕНИЯ. СИСТЕМА УПРАВЛЕНИЯ. ВИДЫ УПРАВЛЕНИЯ 9
1.3. ВИДЫ И СИСТЕМЫ ТЕХНОЛОГИЧЕСКОГО УПРАВЛЕНИЯ.. 14
1.4. УПРАВЛЕНИЕ И ИНФОРМАЦИЯ.. 16
КОНТРОЛЬНЫЕ ВОПРОСЫ... 20
ЛЕКЦИЯ № 2. 21
2.1. ПРИНЦИПЫ ПОСТРОЕНИЯ САУ.. 21
2.2. ОБЩИЕ ПОНЯТИЯ ТАУ.. 27
КОНТРОЛЬНЫЕ ВОПРОСЫ... 33
ЛЕКЦИЯ № 3. 34
2.3. ПОНЯТИЕ ОБ ЭЛЕМЕНТАХ САУ И ИХ ХАРАКТЕРИСТИКИ.. 34
2.4. КЛАССИФИКАЦИЯ САУ.. 41
КОНТРОЛЬНЫЕ ВОПРОСЫ... 56
ЛЕКЦИЯ № 4. 56
2.5. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ САУ.. 56
КОНТРОЛЬНЫЕ ВОПРОСЫ... 62
ЛЕКЦИЯ № 5. 63
2.6. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ САУ.. 63
2.7. ЛОГАРИФМИЧЕСКИЕ АМПЛИТУДНО-ФАЗО-ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ САУ 69
КОНТРОЛЬНЫЕ ВОПРОСЫ... 73
ЛЕКЦИЯ № 6. 73
3.1. ФОРМЫ ПРЕДСТАВЛЕНИЯ МОДЕЛЕЙ.. 73
3.2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ И САУ.. 76
3.3. ОСНОВНЫЕ ПОНЯТИЯ О ТИПОВЫХ ЗВЕНЬЯХ.. 77
Безынерционное звено. 78
Апериодическое звено. 79
Колебательное звено. 79
Идеальное интегрирующее звено. 80
Реальное интегрирующее звено. 81
Изодромное интегрирующее звено. 81
Идеальное дифференцирующее звено. 81
Реальное дифференцирующее звено. 82
Звено чистого запаздывания. 82
КОНТРОЛЬНЫЕ ВОПРОСЫ... 82
ЛЕКЦИЯ № 7. 83
3.4. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ТИПОВЫХ ЗВЕНЬЕВ.. 83
КОНТРОЛЬНЫЕ ВОПРОСЫ... 92
ЛЕКЦИЯ № 8. 92
3.5. СТРУКТУРНОЕ ПРЕДСТАВЛЕНИЕ САУ.. 92
3.6. ПОСТРОЕНИЕ ЛАЧХ и ЛФЧХ САУ.. 98
КОНТРОЛЬНЫЕ ВОПРОСЫ... 104
ЛЕКЦИЯ № 9. 104
4.1. КОРНЕВЫЕ МЕТОДЫ ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ САУ.. 104
4.2. АЛГЕБРАИЧЕСКИЙ КРИТЕРИЙ УСТОЙЧИВОСТИ ГУРВИЦА.. 112
ЛЕКЦИЯ № 10. 116
4.3. ОБЛАСТИ И ЗАПАСЫ УСТОЙЧИВОСТИ САУ.. 116
4.4. ЧАСТОТНЫЙ КРИТЕРИЙ УСТОЙЧИВОСТИ НАЙКВИСТА.. 121
4.5. ОЦЕНКА УСТОЙЧИВОСТИ ПО ЛЧХ.. 124
ЛЕКЦИЯ № 11. 126
5. АНАЛИЗ КАЧЕСТВА САУ.. 126
5.1. ПОКАЗАТЕЛИ КАЧЕСТВА САУ.. 127
5.2. АНАЛИЗ КАЧЕСТВА ПЕРЕХОДНЫХ ПРОЦЕССОВ.. 135
ЛЕКЦИЯ № 12. 138
5.3.ТОЧНОСТНЫЕ ХАРАКТЕРИСТИКИ СИСТЕМ... 138
ЛЕКЦИЯ № 13. 148
5.4.АНАЛИЗ ТОЧНОСТИ СИСТЕМ УПРАВЛЕНИЯ.. 148
5.5. АНАЛИЗ КАЧЕСТВА С ИСПОЛЬЗОВАНИЕМ ЧАСТОТНЫХ ХАРАКТЕРИСТИК 152
5.6. СПОСОБЫ ПОВЫШЕНИЯ КАЧЕСТВА САУ.. 153
ЛЕКЦИЯ 14. 163
6. СИНТЕЗ СИСТЕМ... 163
6.1. СИНТЕЗ СИСТЕМ НА ОСНОВЕ МЕТОДА ЛОГАРИФМИЧЕСКИХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК.. 163
6.2. СИНТЕЗ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ НА ОСНОВЕ ЛАЧХ.. 169
ЛЕКЦИЯ 15. 173
6.ОБЩИЕ ПРИНЦИПЫ СИСТЕМНОЙ ОРГАНИЗАЦИИ.. 173
6.1. ОСНОВНЫЕ ПРИНЦИПЫ УПРАВЛЕНИЯ БСУ.. 173
6.2. ОСНОВНЫЕ ПОЛОЖЕНИЯ СИСТЕМНОГО ПОДХОДА.. 177
ЛЕКЦИЯ 16. 183
7. ОСНОВНЫЕ СВЕДЕНИЯ ПО ОСУ.. 183
7.1. ОСОБЕННОСТИ ОРГАНИЗАЦИОННЫХ СИСТЕМ УПРАВЛЕНИЯ.. 183
7.2. ПРОИЗВОДСТВО КАК ОБЪЕКТ УПРАВЛЕНИЯ.. 185
7.3. ФУНКЦИОНАЛЬНАЯ МОДЕЛЬ УПРАВЛЕНИЯ ПРЕДПРИЯТИЕМ... 187
7.4. МЕТОДЫ ОРГАНИЗАЦИОННОГО УПРАВЛЕНИЯ.. 190
7.5. ИНФОРМАЦИЯ В ПРОЦЕССЕ ОРГАНИЗАЦИОННОГО УПРАВЛЕНИЯ.. 192
7.6. ОСНОВНЫЕ ПРИНЦИПЫ ПРОЕКТИРОВАНИЯ ОСУ.. 194
ЛЕКЦИЯ № 17. 196
6.ДИСКРЕТНЫЕ САУ.. 196
6.1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ ДСАУ.. 196
6.2. ИСПОЛЬЗОВАНИЕ МИКРОПРЦЕСССОРОВ И МИКРО-ЭВМ В СУ.. 199
6.3. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЦСАУ.. 203
ЛЕКЦИЯ № 18. 211
6.4. АНАЛИЗ ДСАУ.. 211
6.5. СИНТЕЗ ЦСАУ.. 217
В В Е Д Е Н И Е
Задачи по управлению теми или иными явлениями или процессами, возникающими в результате практической деятельности человека или независимо от нее, обширны и многообразны. Одним из наиболее важных направлений в этом плане является применение средств автоматики и систем автоматического управления(САУ).
Современная автоматика (совокупность методов и средств автоматического управления) и системы автоматического управления обеспечивают эффективное управление различными процессамицеленаправленного преобразования энергии, вещества и информации для получения требуемых продуктов или результатов в различных сферах деятельности человека. Автоматические системы в настоящее время широко применяются в промышленности, на транспорте, в устройствах связи, в информационной технике и т.д. С экономической точки зрения автоматизация является одним из перспективных направлений развития всех отраслей науки и техники, так как она способствует повышению производительности труда, снижению всякого рода затрат, а отсюда повышению эффективности любой деятельности. Поэтому каждому специалисту необходимо иметь определенные знания и умение использования автоматики и САУ для эффективного управления существующими технологиями, а также для создания и освоения новых высоких технологий.
Курс «Основы автоматики и теории управления» знакомит с элементами автоматики, общими принципами построения систем автоматического управления, с методами исследования, расчета и проектирования этих систем. В нем рассматриваются как общие принципы управления, так и особенности, присущие его основным видам, а также математические методы, которые используются в анализе и реализации процессов управления, особенно при его автоматизации.
Изучение данной дисциплины дает будущим специалистам знание и умение создавать и использовать системы автоматики и автоматического управления различными техническими объектами управления.
В курсе предусмотрено 7 тем:
1. Управление и информатика.
2. Основные понятия и определения САУ.
3. Моделирование САУ.
4. Методы анализа и синтеза САУ.
5. Цифровые САУ.
6. Общие принципы системной организации.
7. Основные сведения по ОСУ.
Целесообразность знакомства с основами теории управления для специалистов по информационным системам связана не только с использованием положений данной теории при практической разработке автоматизированных систем для обеспечения их эффективности, но и с необходимостью умения непосредственного руководства группами работников.
ЛЕКЦИЯ № 1
УПРАВЛЕНИЕ И ИНФОРМАЦИЯ
Информация является одним из основных понятий теории управления, а так же одним из фундаментальных понятий, характеризующих реальность мира как понятия: время, материя, пространство, движение и энергия.
Информация воспринимается органами чувств: зрение, слух, обоняние, осязание, вкус. Естественно, не вся эта информация используется для целей управления, поэтому в данном курсе будем говорить только об информации в системах управления.
Методологии рассмотрения названных свойств информации посвящен один из важнейших разделов кибернетики - теория информации (ТИ), которая исследует процессы хранения, преобразования и передачи информации.
В ТИ важным понятием является понятие сигнала. Процессы управления сопровождаются информационными сигналами – вторичными процессами, несущими информацию о рассматриваемом явлении.
Сигналами называют воздействия, несущие информацию. Сигнал обычно характеризуют в виде некоторой функции времени.
Те воздействия, которые можно изменять произвольно, хотя бы и в некоторых пределах, называют управляющими воздействиями, а внешние независимые воздействия называют возмущениями. Последние делятся на контролируемые и неконтролируемые возмущения Точное число неконтролируемых возмущений может быть неизвестно.
При рассмотрении сигнала принято различать его информационное содержание о первичном процессе и физическую природу вторичного процесса - носителя информации. В зависимости от физической природы носителя выделяют акустические, оптические, электрические, электромагнитные, и пр. сигналы. Природа физического носителя может не совпадать с природой первичного процесса. Например, двигатель внутреннего сгорания разогревается от трения, а о его температуре можно судить по температуре масла, замеряемой с помощью электрических термодатчиков.
В теории управления сигнал рассматривается с кибернетических позиций и отождествляется с количественной информацией об изменении физических переменных изучаемого процесса безотносительно к природе, как первичного процесса, так и носителя сигнала. При этом учитывается, что реальный сигнал может не содержать всей информации о развитии физического явления, равно как и содержать постороннюю информацию. На информационное содержание сигналов оказывают влияние способы их кодирования, шумы и эффекты квантования.
Управление и информация — понятия, неразрывно связанные между собой.
Управление невозможно без достаточной информации о:
• цели управления;
• возмущениях среды;
• состоянии объекта управления;
• характеристиках объекта.
В зависимости от характера и полноты доступной информации реализуют различные принципы управления.
Теория информации имеет дело с определенной моделью системы связи и рассматривает вопросы передачи сообщений по каналам связи (рис. 1.4).
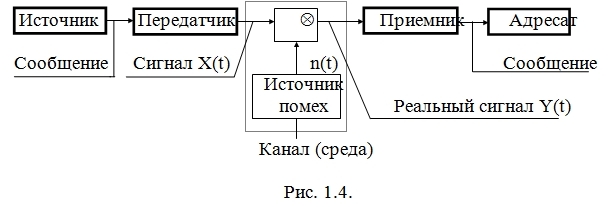
Вопрос адекватности сигнальной информации рассматриваемой физической переменной связан с понятиями идеального и реального сигнала.
Идеальный сигнал можно представить переменной Х(t), в то время как реальный сигнал содержит помехи и шумы измерения n(t). С учетом этого: Y(t)=X(t)+n(t). С реальным сигналом связаны задачи идентификации (оценивания) динамических процессов по текущим измерениям, вопросы фильтрации, сглаживания и прогнозирования.
При этом учитывается, что реальный сигнал может не содержать всей информации о развитии физического явления, равно как и содержать постороннюю информацию. На информационное содержание сигналов оказывают влияние способы их кодирования, шумы и эффекты квантования.
В САУ в зависимости от способа кодирования различают аналоговые и цифровые сигналы. Для аналоговых сигналов их значение (интенсивность какого-либо параметра физического носителя) пропорционально значениям изучаемой физической переменной. В цифровых сигналах информация представлена в виде чисел в определенной кодовой форме, например, в форме двоичных кодов.
Информационное содержание сигнала зависит и от эффектов квантования. По характеру изменения во времени, процессы и сигналы подразделяются на непрерывные и дискретные. К последним, в свою очередь, относятся процессы, квантованные по уровню, и процессы, квантованные по времени.
Основные проблемы, решаемые ТИ, сводятся к вопросам наибольшей производительности канала (количество информации в единицу времени) и надежности связи (способность донести сообщение адресату с минимальными искажениями). Решения этих вопросов связаны с понятием количества информации. Данное понятие особенно важно при необходимости обработки большого объема информации, рационализации информационных потоков при автоматизации их обработки.
Количество информации понятие достаточно сложное. Для статической информации ее количество можно определить в битах или байтах. Это касается информации, переносимой на машинных носителях.
В определении количества информации используются также вероятностный и комбинаторный подходы.
Пропускная способность канала связи - С определяется как максимальная величина относительной информации J(x,y) выходного сигнала X(t) относительно входного - Y(t), полученная в единицу времени to:
С = lim (Jmax(x,y) / to), (1.5)
при to, стремящемся к бесконечности.
На пропускную способность канала влияют помехи (шум). Под помехой в передаче информации принимается не только физические воздействия электромагнитных полей, но и различного рода искажения информации в оргсистемах.
В условиях помех пропускная способность определяется соотношением:
C = Fc * Px / Pn, (1.6)
где Fc - диапазон частот канала связи;
Px, Pn - соответственно, средние мощности полезного сигнала и помехи.
В управлении существенную роль играет эффективность и надежность канала связи. Эффективность связана с задачами максимального заполнения объема сигнала полезной информацией и соответственно сокращения в нем помех.
Надежность есть мера соответствия принятого сообщения переданному и главным образом зависит от способности системы противостоять вредному действию помех, т.е. ее помехоустойчивости.
Для повышения помехоустойчивости используются следующие методы:
1) метод накопления заключается в многократном повторении сообщений, а также дублировании каналов связи. Здесь реализуется принцип избыточности информации;
2) метод фильтрации полезного сигнала от помех. При этом фильтр, основанный на той или иной физической основе, задерживает информацию помех;
3) корреляционный метод - основан на выделении помехи по принципу ее случайного характера и характеризующейся затухающей амплитудой.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Понятия: система, внешняя среда. Параметры и свойства систем.
2. Отличительные особенности и свойства БСУ.
3. Определение управления. Система управления. Состав и взаимодействие элементов. Особенности сигналов и каналов связи. Функции СУ.
4. Управляющая система и её основные характеристики. Факторы эффективности УС.
5. Виды и системы технологического управления.
6. Управление и информация. Модель системы связи.
7. Понятие помехоустойчивости и пропускной способности канала связи. Методы повышения помехоустойчивости.
ЛЕКЦИЯ № 2
ПРИНЦИПЫ ПОСТРОЕНИЯ САУ
Общие принципы построения САУ и методы исследования процессов в них изучает ТАУ - теория автоматического управления.
В ТАУ рассматриваются системы, которые можно представить в виде следующей обобщенной функциональной схемы (рис 2.1).
На этой схеме показаны основные и наиболее часто встречающиеся элементы систем автоматического управления. При этом все элементы, как правило, обладают свойством однонаправленности, т.е. сигнал поступающий на вход элемента преобразуется в нем в выходной сигнал в соответствии с протекающими в нем физическими процессами.
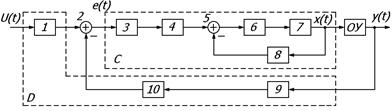
Рис. 2.1
Здесь:
U(t) – задающее воздействие (общий сигнал в систему),
x(t) – управляющее воздействие (то, что вырабатывает регулятор),
y(t) – управляемая величина,
e(t) – отклонение (ошибка) управляемой величины от задающего воздействия.
1 - Задающее устройство, которое преобразует входной сигнал U(t) в сигнал, удобный для дальнейшего использования;
Å 2 - сравнивающее устройство, вырабатывает сигнал ошибки (отклонения) как разность задающего сигнала и управляемой величины;
3 - преобразующее устройство, преобразует сигнал ошибки в другую форму, удобную для дальнейшего использования, при этом не выполняются функции усиления и коррекции (пример: электрическая®механическая);
4 и 8 - корректирующие устройства, улучшают динамические свойства регулирования и повышают устойчивость. В зависимости от включения бывают параллельными или последовательными. 4 - последовательная коррекция, 8 - параллельная коррекция.
Å 5 - сравнивающее устройство местной обратной связи;
6 -усилительное устройство, усиливает мощность сигнала;
7 - исполнительное устройство, вырабатывает управляющее воздействие x(t) непосредственно на объект управления;
9 - чувствительный элемент, фиксирует (измеряет) управляемую величину y(t);
10 - элемент главной обратной связи, преобразует управляемую величину y(t) в вид, удобный для сравнения с задающим сигналом;
ОУ - объект управления.
Блоки 1, 10, 9 образуют датчик (D), а блоки 3, 4, 5, 6, 7, 8 – сервомеханизм (C).
Тогда, с учетом укрупнений, схему на рис.3.1. можно преобразовать в следующую:
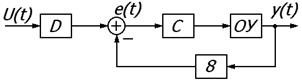
Рис.2.2
Здесь датчик измеряет управляемую величину и задающую, т.е. выполняет функцию сбора информации. Сервомеханизм, в качестве регулятора, обрабатывает информацию, вырабатывает и реализует управляющее воздействие.
Реальная САУ может не содержать некоторые из рассматриваемых пронумерованных блоков. Некоторые блоки могут объединяться. То, что называли блоками, может называться звеньями. И регулятор, и ОУ могут состоять из нескольких звеньев.
Для того чтобы понять, как устройство управления (регулятор) в САУ выполняет свои функции,рассмотрим признаки воздействия:
1) энергетический, характеризующий способность воздействия нести энергию; он важен при получении, преобразовании и передаче энергии;
2) метаболический, характеризующий материальную сторону воздействия; он важен при преобразовании вещества, его количества, формы и положения;
3) информационный, характеризующий способность воздействия быть носителем информации.
В теории систем автоматического управления и связи важна только третья, информационная сторона воздействий. Поэтому основной функцией устройства управления (УУ) в САУ является преобразование и обработка информации об объекте управления с целью определения законов управления объектом.
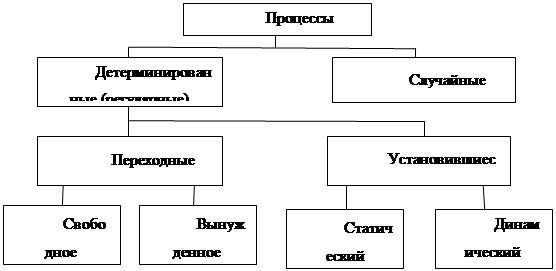
Классификацию процессов управления можно представить схемой, показанной на рис. 2.2.
Рис. 2.3
Определения, представленные на рис.2.3 имеют следующий смысл:
Детерминированным называется процесс управления, протекающий в системе вследствие внешних воздействий, изменяющихся во времени по регулярным законам.
Случайным называется процесс, изменяющийся во времени непредсказуемым образом.
Установившимся называется детерминированный процесс, происходящий в САУ после окончания переходного процесса, когда время протекания процесса стремится к бесконечности.
Свободное движение — переходный процесс, обусловленный ненулевыми начальными условиями при отсутствии внешнего воздействия.
Вынужденное движение — это переходный процесс, обусловленный внешним воздействием.
Статический режим — это установившийся процесс при постоянных во времени внешних воздействиях.
Динамический режим — это установившийся процесс при внешних воздействиях, изменяющихся во времени,
В различных САУ реализуются следующие виды управления:
l. Координация — управление, цель которого заключается в согласовании процессов в разных элементах (подсистемах) объекта управления.
2. Регулирование — управление, цель которого заключается в обеспечении близости текущих значений одной или нескольких координат объекта управления к их заданным значениям.
3. Стабилизация — регулирование, цель которого заключается в обеспечении постоянства значений управляемых координат на заданном интервале времени.
4. Следящее регулирование — регулирование, цель которого заключается в обеспечении соответствия значений управляемых ко- ординат значениям задающих воздействий (сигналов), изменяющихся заранее неизвестным образом.
5. Программное регулирование — регулирование, цель которого заключается в обеспечении соответствия значений управляемых координат значениям задающих воздействий (сигналов), изменяющихся заранее известным образом.
6. Оптимальное управление — управление, цель которого заключается в обеспечении экстремального значения показателя качества управления.
7. Экстремальное управление — управление, цель которого заключается в достижении и удержании экстремума заданного показателя качества функционирования.
8. Терминальное управление — управление, цель которого заключается в переводе объекта управления в заданное конечное состояние в заданный момент времени.
9. Финитное управление — управление, цель которого заключается в переводе объекта управления из заданного начального состояния в заданное конечное состояние за ограниченное время.
10. Противоаварийное управление — управление, цель которого заключается в предотвращении развития аварийных событий, возникающих в системе управления.
11, Восстанавливающее управление — управление, цель которого заключается в возвращении системы в состояние исправности, работоспособности или правильности функционирования, утраченное вследствие дефектов ее элементов или структуры.
12. Гомеостатическое управление — управление, свойственное природным, например биологическим, системам и заключающееся в поддержании устойчивой и экономичной работы системы в нормальных и экстремальных условиях за счет многоуровневой организации взаимодействующих между собой и с внешней средой подсистем регулирования.
В непрерывных САУ УС реализуют пять типовых законов (алгоритмов) регулирования:
– пропорциональный закон (П-регулятор);
– интегральный закон (И- регулятор);
– пропорционально-интегральный закон (ПИ- регулятор);
– пропорционально-дифференциальный закон (ПД- регулятор);
– пропорционально-интегрально-дифференциальны закон (ПИД- регулятор).
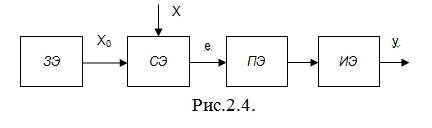
Регулятор (Рис. 2.4.) включает в себя: задающий элемент (задатчик-ЗЭ), позволяющий установить заданное значение регулируемой величины; сравнивающий элемент (СЭ), вырабатывающий величину отклонения e=х0-х; преобразующий элемент (ПЭ), преобразующий величину отклонения е в соответствии с законом регулирования, реализуемом регулятором, и исполнительный элемент (ИЭ), предназначенный для оказания управляющего воздействия на объект. Исполнительные элементы обычно создают механическое перемещение регулирующего органа и называются исполнительными механизмами, сервомоторами или серводвигателями.
Если под входной величиной принять e(t) – отклонение (ошибка) управляемой величины от задающего воздействия, а под выходной величиной — значение команды управления для исполнительного органа у, то уравнения законов регулирования будут иметь вид:
П-регулятор:  ; (2.1)
; (2.1)
И-регулятор:  ; (2.2)
; (2.2)
ПИ-регулятор:  ; (2.3)
; (2.3)
ПД-регулятор:  ; (2.4)
; (2.4)
ПИД-регулятор:  . (2.5)
. (2.5)
В формулах (2.3)—(2.5) обозначены: k1, k2, k3— коэффициенты передачи соответствующих регуляторов: Ти =1/k2— постоянная времени интегрирования; Тд=1/k3 — постоянная времени дифференцирования.
ОБЩИЕ ПОНЯТИЯ ТАУ
В ТАУ обычно абстрагируются от конкретной физической природы и конструкции объекта, представляют его в виде черного ящика, и используют следующие основные понятия:
1. Процесс управления. Это изменение величин y(t) и x(t) во времени.
2. Программа управления. Решая задачу управления, САУ осуществляет поддержание y = const или его изменение по определенной программе.
Программы управления могут быть:
- временными, y = y(t), т.е. является функцией времени;
- параметрическими, y = y(S1, S2... Sn), где Si - некоторые физические параметры (координаты, перемещения и т.п.).
Таким образом, программа управления определяет результат работы системы.
3. Закон управления. Выполнение задач управления осуществляется с помощью формирования целесообразного сигнала управления x по соответствующему алгоритму - закону управления. Математически закон управления определяется уравнениями, описывающими работу УС. Различают линейные и нелинейные законы управления, определяемые видом функции x = x(t). Они должны обеспечивать требуемую точность, устойчивость и качество процесса управления.
4. Переходной процесс. Это перевод УО из состояния Zi в состояние Zi+1 с изменением выходных сигналов от yi до yi+1, по сравнению с установившимся режимом, при котором y = const.
5. Передаточная функция (ПФ), являющаяся соотношением функций входного и выходного сигналов x = x(t) и y = y(t). Данная функция может быть линейной и нелинейной. В первом случае её часто называют коэффициентом преобразования или усиления. Подробнее о ПФ см.раздел 2.5.
ТАУ включает прикладные методы, позволяющие на основе анализа приведенных функций судить об устойчивости, точности и качестве управления.
Свойство поведения, когда после исчезновения возмущения состояние объекта стремится к исходному, называют устойчивостью. Под устойчивостью понимается свойство САУ обеспечивать затухание переходного процесса.
Устойчивость объектов и систем управления является фундаментальным свойством, необходимым для их нормального функционирования, Целью создания многих систем управления является стабилизация неустойчивых состояний {режимов) объектов.
При возмущениях в системе возникают колебания, которые могут быть затухающими, незатухающими, стремящимися к положению равновесия, или уходящими от него (неустойчивые).
Понятие устойчивости системы связано со способностью системы возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния. Если система неустойчива, то она не возвращается в состояние равновесия.
Точность оценивается величиной ошибки между действительным и требуемым значениями выходного сигнала. Под точностью понимается величина ошибки регулирования в различных установившихся режимах.
В системах стабилизации таким режимом является установившееся состояние (положение равновесия), а точность системы характеризуется величиной статической ошибки eст отклонения от заданного состоянии при влиянии дестабилизирующих воздействий.
Качество управления определяется с помощью показателей (критериев качества), которые характеризуют особенности процесса в установившихся и переходных режимах.
Устойчивость системы является необходимым, но недостаточным условием ее работоспособности. Устойчивая система может оказаться недостаточно точной при отработке различных воздействий; недостаточно быстродействующей при выходе на заданную величину, и т.п. При исследовании систем приходится решать задачи обеспечения требуемых показателей качества переходного процесса: быстродействия, колебательности, перерегулирования, характеризующих точность и плавность протекания процесса. Качество работы системы в конечном счете определяется величиной ошибки, равной разности между требуемым и действительными значениями регулируемой величины.
Более подробно методы анализа качества САУ будут рассматриваться позже.
Помимо устойчивости, важным свойством, характеризующим системы управления, является инвариантность — независимость (слабая зависимость) управляемой переменной от действующих возмущений. Многие объекты имеют устойчивый режим функционирования, однако действие возмущений вызывает недопустимые отклонения управляемых переменных. Тогда создаются элементы систем управления, основной целью которых является компенсация действия этих возмущений или их ослабление.
Поведение системы будет иным, если изменятся свойства ее элементов. Однако изменения свойств объекта или других элементов системы не должны приводить к существенным изменениям характера процессов и ни в коем случае — к потере устойчивости. Система должна быть грубой и малочувствительной или, как еще говорят, робастной.
Управляемость и наблюдаемость. Задача управления системой состоит в определении такой функции x(t), при которой осуществляется целенаправленное изменение состояния системы. Всегда ли эта задача имеет решение? Ответ на этот вопрос дают два свойства системы – управляемость и наблюдаемость.
Линейная система является управляемой, если она может быть переведена из любого начального состояния Z0(t) в любое конечное состояние Zm(t) за конечное время Т.
Линейная система является наблюдаемой, если любое ее состояние Z0(t) можно восстановить по значениям x(t) и y(t), измеренным на интервале 0 > t > T.
Можно ли управлять объектом так, чтобы не было ошибки? В реальных системах – нет. Прежде всего, из-за внешних воздействий и шумов, которые заранее неизвестны. Кроме того, объекты управления обладают инерционностью, то есть, не могут мгновенно перейти из одного состояния в другое. Возможности регулятора и приводов (то есть мощность сигнала управления) всегда ограничены, поэтому быстродействие системы управления (скорость перехода на новый режим) также ограничена.
При отладке систем важным понятием является перерегулирование - это процентное соотношение разницы максимального перерегулирования и установившегося значения, смысл которого понятен из рис.:
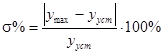 .
.
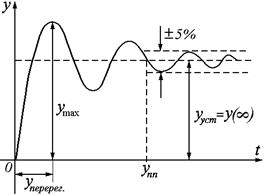
Рис.2.5.
Достаточно важным понятием в ТАУ является понятие воздействия, о котором говорилось ранее.
Сигнал u(t), определяющий требуемый закон движения системы (требуемое поведение регулируемой переменной системы), называется задающим воздействием.
Среда является источником возмущающих воздействий, внешних задающих воздействий.
Таким образом, возмущающим воздействием называется сигнал, отражающий влияние внешней среды на элементы системы.
К возмущающим относят воздействия, препятствующие функционированию объекта. Это могут быть силы сопротивления или трения для кинематических механизмов, температура окружающей среды для тепловых процессов и т. д. Возмущающие воздействия объединяются в вектор возмущений.
Сигнал e(t) = y*(t) – y(t), характеризующий текущее значение отклонения выходной переменной от задающего воздействия, называется рассогласованием, отклонением или ошибкой управления.
Задачи стабилизации и слежения иначе могут быть сформулированы как задачи поддержания нулевого значения рассогласования, т. е. e(t) → 0.
При экспериментальном и теоретическом исследовании автоматических систем и их элементов используют ряд стандартных сигналов, называемых типовыми воздействиями. Эти воздействия описываются простыми математическими функциями и легко воспроизводятся при испытании систем.
Наибольшее применение в теории и практике автоматического управления находят следующие четыре типовых воздействия: ступенчатое, импульсное, гармоническое и линейное.
Ступенчатое воздействие – это воздействие, которое мгновенно возрастает от нуля до некоторого значения и далее остается постоянным (см. рис.). 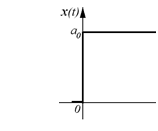
Ступенчатому воздействию соответствует функция:
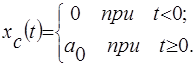
При анализе и расчете систем удобно использовать ступенчатое воздействие, у которого величина а0 = 1. Его называют единичным ступенчатым воздействием (единичным скачком) и обозначают 1 (t). Математическое выражение, описывающее единичный скачок, имеет вид:
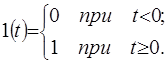
Ступенчатое воздействие чаще всего используют при испытаниях и расчетах систем стабилизации, так как эти воздействия наиболее близки к реальным входным (задающим и возмущающим) воздействиям систем стабилизации.
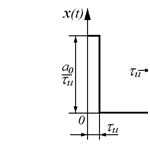
Импульсное воздействие представляет собой одиночный импульс прямоугольной формы (см. рис.), имеющий достаточно большую высоту и весьма малую продолжительность (по сравнению с инерционностью испытываемой системы). Очевидно, что площадь такого импульса всегда равна а0.
 При математическом анализе автоматических систем используют единичное импульсное воздействие, которое описывается так называемой дельта – функцией:
При математическом анализе автоматических систем используют единичное импульсное воздействие, которое описывается так называемой дельта – функцией:
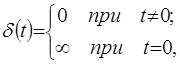
причем

Согласно этим выражениям, дельта – функцию можно рассматривать как импульс, имеющий бесконечно большую высоту, бесконечно малую длительность и единичную площадь. Дельта – функцию можно определить также как производную единичного скачка:
 .
.
В качестве стандартного гармонического воздействия используют обычно сигнал синусоидальной формы, описываемый функцией
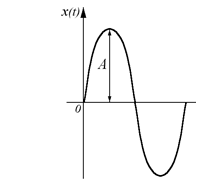

где А – амплитуда сигнала;
 - круговая частота, рад/с;
- круговая частота, рад/с;
Т – период сигнала, с.
Гармонические воздействия широко используются при исследовании точности и устойчивости как стабилизирующих, так следящих и программных автоматических систем. Это объясняется двумя обстоятельствами: во-первых, реальные возмущения часто имеют периодический характер и поэтому могут быть представлены в виде суммы гармонических составляющих; во-вторых, математический аппарат анализа автоматических систем хорошо разработан именно для случая гармонических воздействий.
Для следящих и программных систем типовым является линейное воздействие (см. рис.)

 .
.
Коэффициент а1 характеризует скорость нарастания воздействия x(t).
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Обобщенная схема САУ.
2. Виды управления, реализуемые в САУ.
3. Основные понятия ТАУ.
4. Устойчивость, точность, качество, инвариантность и другие характеристики САУ.
5. Понятие воздействия и типовые воздействия в ТАУ.
ЛЕКЦИЯ № 3
КЛАССИФИКАЦИЯ САУ
Применение тех или иных методов ТАУ в определенной мере связано с классификацией САУ, в основу которой могут быть положены наиболее существенные признаки. Данную классификацию удобно представить в виде таблицы 2.1.
Линейными называют системы, которые могут быть отражены линейными операторными уравнениями (например, линейными дифференциальными уравнениями или системами этих уравнений); в противном случае система входит в класс нелинейных (релейное, логическое или другое).
В линейных системах выходной сигнал, независимо от вида входного, пропорционален ему, т.е. y(t) / x(t) = const. Для нелинейных систем это соотношение не является постоянным.
В классе линейных и нелинейных систем также различают:
- системы с переменными параметрами - это такие САУ, в которых хотя бы одни параметры системы изменяются во времени, например, коэффициент усиления.
- системы с запаздыванием - это такие САУ, в которых присутствует хотя бы одно звено чистого запаздывания (непрерывному входному сигналу соответствует непрерывный выходной сигнал, сдвинутый по времени на t, где t - время запаздывания).
К нелинейным системам относятся релейные, логические и прочие системы.
Линейные и нелинейные дискретные системы характеризуются соответственно линейными и нелинейными разностными уравнениями или их системами.
Линейные и нелинейные стационарные системы выражают дифференциальные уравнения или системы уравнений с постоянными коэффициентами.
| Характеристика
| Признак
| Типы систем автоматического управления
|
| Математическое
описание
| Линейность
| Линейные
| Нелинейные (релейные, логические и пр.)
|
| С переменными параметрами, с запаздыванием
|
| Дискретность
| Непрерывные
| Дискретные
| Непрерывно-дискретные
|
| Стационарность
| Стационарные
| Нестационарные
|
|
|
| Распределённость
| Сосредоточенные
| Распределенные
|
|
|
| Детерминизм
| Детерминированные
| Стохасти |