При анализе точности систем управления рассматриваются ошибки статических и астатических систем при типовых задающих воздействиях [39]:
Рассмотрим три типа задающих воздействий:
 1. хЗ 1= А 0×1(t) - постоянное входное воздействие.
1. хЗ 1= А 0×1(t) - постоянное входное воздействие.
Тогда  .
.
Это означает, что,
если n =0, следовательно, система статическая, то ошибка будет равна  , - постоянная,
, - постоянная,
а если n =1(астатизм 1-го порядка), то ошибка - 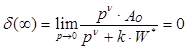 , значит данная система отрабатывает с входное воздействие с нулевой ошибкой.
, значит данная система отрабатывает с входное воздействие с нулевой ошибкой.
Т.о. при порядке астатизма системы n ³1, система при данном возмущающем воздействии является астатической.
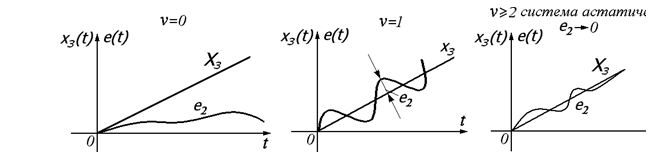
2. хЗ 1= А0 × t ×1(t) – линейно изменяющееся входное воздействие.

Тогда 
Это означает, что,
если n =0, то ошибка будет равна  , следовательно, система находится в неопределенном состоянии;
, следовательно, система находится в неопределенном состоянии;
если n =1(астатизм 1-го порядка), то ошибка -  , значит данная система отрабатывает с входное воздействие с постоянной установившейся ошибкой.
, значит данная система отрабатывает с входное воздействие с постоянной установившейся ошибкой.
а если n =2, то ошибка равна  , что говорит об астатичности данной системы.
, что говорит об астатичности данной системы.
Т.о. при линейном изменяющемся задающем воздействии, система будет статической при порядке астатизма системы n =1, а при n ³2 – система является астатической.
3. х З 1= А 0× t 2×1(t) нелинейное входное воздействие.

Тогда  .
.
Это означает, что:
если n =0, то ошибка будет равна  , следовательно, система находится в неопределенном состоянии;
, следовательно, система находится в неопределенном состоянии;
если n =1, система находится в неопределенном состоянии, т.к. ошибка -  стремится к бесконечности.
стремится к бесконечности.
если же n =2, то ошибка равна  , значит данная система статическая;
, значит данная система статическая;
если n =3, то ошибка равна  - в этом случае система является астатической.
- в этом случае система является астатической.
Как видим, порядок астатизма системы также влияет на точность системы. Чем выше астатизм, тем точнее система отрабатывает более сложные воздействия. Однако с увеличением порядка астатизма системы ее устойчивость ухудшается. Поэтому системы САУ с порядком астатизма более двух встречаются редко.
Рассмотрим теперь установившийся режим системы управления [43] при изменении задающего воздействия по гармоническому закону
g(t) = gmsinωt.
Для упрощения предположим, что возмущающее воздействие равно нулю. В линейной системе ошибка в установившемся режиме также изменяется по гармоническому закону с той же частотой:
x(t) = xmsin(ωt+ψ).
Точность системы в этом режиме оценивается по величине амплитуды ошибки. Амплитудные значения связаны между собой модулем частотной передаточной функции замкнутой системы, то есть можно записать
xm = │Фxg (jω)│ gm или 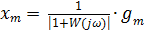
Систему всегда проектируют таким образом, чтобы величина ошибки была меньше задающего воздействия, т.е. выполняется условие W(jω)>>1. В связи с этим единицей в знаменателе приведенной выше формулы можно пренебречь. Таким образом, амплитуда ошибки определяется как
xm = gm/ A(ω) (6.15)
где A(ω) - модуль частотной передаточной функции разомкнутой системы.
На ошибку, обусловленную возмущающим воздействием влияет только астатизм регулятора.
Ошибка при возмущающем воздействии обратно пропорциональна коэффициенту передачи системы
δf =1/k.
Если система работает на отслеживание ошибки, обусловленное задающим воздействием, то такая система называется системой стабилизации.
Если система работает на отслеживание ошибки, обусловленное возмущающим воздействием, то такая система называется следящей системой.