Под улучшением качества процесса управления понимается [43] изменение динамических свойств системы с целью обеспечения требуемых показателей качества, главными из которых являются устойчивость, точность и быстродействие. Это достигается двумя путями.
Во-первых, настройкой регулятора. Настройка регулятора заключается в рациональном изменении его параметров, то есть коэффициентов передачи и постоянных времени так, чтобы удовлетворить поставленным требованиям качества управления, которые определяются критериями качества.
Во-вторых, введением корректирующих устройств. При невозможности решить задачу получения требуемого качества процесса управления в рамках имеющейся системы путем изменения ее параметров изменяют структуру системы. Для этой цели в систему вводят корректирующие средства, которые должны изменить динамику системы в нужном направлении. Корректирующие средства представляют собой динамические звенья с определенными передаточными функциями. Корректирующие звенья изменяют передаточную функцию регулятора системы, и таким образом обеспечивается формирование необходимого закона управления для удовлетворения поставленных требований к системе.
Регулятор формирует управляющее воздействие u(t) в соответствии с законом управления. Линейный стандартный закон управления имеет следующий вид:
t
u(t) = kПx(t) + kИ∫x(t)dt + kД dx(t)/ dt, (8.3)
где первое слагаемое является пропорциональной, второе - интегральной, третье -дифференциальной составляющими закона, а коэффициенты kП, kИ и kД определяют вклад каждой из составляющих в формируемое управляющее воздействие.
Интегральная составляющая закона управления вводится для повышения точности, а дифференциальная - для повышения быстродействия работы системы.
Регулятор, формирующий управляющее воздействие в соответствии с (8.3), имеет передаточную функцию
WR(s) = kП + kИ/s + kДs. (8.4)
Настройка такого регулятора заключается в задании значений коэффициентов kП, kИ, kД таким образом, чтобы удовлетворить требованиям качества управления в соответствии с выбранными критериями качества.
На практике широкое распространение получили типовые или промышленные регуляторы, представляющие собой универсальные автоматические устройства, легко приспосабливаемые для автоматизации разнообразных технологических процессов и объектов. При этом объект управления, как правило, является звеном статического типа и его передаточная функция равна
WОУ(0)=kОУ,
где kОУ - коэффициент передачи объекта управления.
Типовые регуляторы реализуют типовые законы управления, являющиеся частными случаями линейного стандартного закона управления, и классифицируются следующим образом.
П-регуляторы. Реализуют П-закон или пропорциональный закон управления
u(t) = kП x(t).
Передаточная функция П-регулятора
WR(s) = kП.
Пропорциональное управление позволяет уменьшить установившуюся ошибку в объекте в (1+k) раз, где k = kП×kОУ − коэффициент передачи разомкнутой системы.
И-регуляторы. Реализуют И-закон или интегральный закон управления
t
u(t) = kИ∫x(t)dt.
Передаточная функция И-регулятора
WR (s) = kИ /s.
При интегральном управлении получается система, астатическая по отношению к задающему воздействию. Повышение степени астатизма приводит к увеличению установившейся точности системы, но одновременно снижает ее быстродействие, а также приводит к ухудшению устойчивости. Снижение быстродействия объясняется тем, что в первый момент времени при появлении ошибки управляющее воздействие равняется нулю и только затем начинается его рост. В системе пропорционального управления рост управляющего воздействия в первые моменты времени происходит более интенсивно, так как наличие ошибки сразу дает появление управляющего воздействия, в то время как в системе интегрального управления должно пройти некоторое время.
ПИ-регуляторы. Реализуют ПИ-закон или пропорционально-интегральный закон управления
t
u(t) = kП x(t) + kИ∫x(t)dt.
Передаточная функция ПИ-регулятора
WR(s) = kП + kИ /s = kИ (TИs+1)/ s,
где TИ = kП/ kИ.
Пропорционально-интегральное (изодромное) управление сочетает в себе высокую точность интегрального управления (астатизм) с большим быстродействием пропорционального управления. В первые моменты времени при появлении ошибки система с ПИ-регулятором работает как система пропорционального регулирования, а в дальнейшем начинает работать как система интегрального управления.
ПД-регуляторы. Реализуют ПД-закон или пропорционально-дифференциальный закон управления
u(t) = kП x(t) + kД dx(t)/dt.
Передаточная функция ПД-регулятора
WR (s) = kП + kДs = kП(TДs + 1),
где TД = kД/ kП.
Пропорционально-дифференциальное управление применяются для повышения быстродействия работы системы. Регулирование по производной не имеет самостоятельного значения, так как в установившемся состоянии производная от ошибки равна нулю и управление прекращается. Однако она играет большую роль в переходных процессах, потому что позволяет учитывать тенденцию к росту или уменьшению ошибки. В результате увеличивается скорость реакции системы, повышается быстродействие, снижается ошибка в динамике.
ПИД-регуляторы. Реализуют ПИД-закон или пропорционально-интегрально-дифференциальный закон управления, соответствующий линейному стандартному закону вида (8.3).
ПИД-регулятор, представляющий собой астатический изодромный регулятор с предвидением, обеспечивает повышенную точность и повышенное быстродействие системы.
В общем случае закон управления может иметь сложный вид.
Корректирующие устройства
Основная задача корректирующих устройств состоит в улучшении точности системы и качества переходных процессов. Однако наряду с этим путем дополнительного введения в систему корректирующих устройств решается более общая задача - обеспечение устойчивости системы, если она была неустойчивой, а затем и желаемого качества процесса управления.
Различают три вида основных корректирующих устройств.
Последовательные корректирующие устройства. Они вводятся в цепь регулятора последовательно с другими звеньями. На рис.8.2 представлена структурная схема системы с последовательным корректирующим устройством.

Рис. 8.2. Структурная схема системы
с последовательным корректирующим устройством
Здесь W1(s), W2(s) представляют собой передаточные функции заданных частей регулятора, WПКУ(s) - передаточная функция последовательного корректирующего звена, WОУ(s) - передаточная функция объекта управления.
Передаточная функция регулятора с последовательным корректирующим устройством
WR1(s) = W1(s) W2(s) WПКУ(s). (8.5)
Способ коррекции с помощью последовательного корректирующего устройства не требует сложных расчетов и прост в практическом исполнении. Поэтому он нашел широкое применение, особенно при коррекции систем, в которых используется электрический сигнал в виде напряжения постоянного тока, величина которого функционально связана с сигналом рассогласования. Однако, последовательные корректирующие устройства не ослабляют влияния изменений параметров элементом системы на ее показатели качества. Поэтому последовательные корректирующие устройства рекомендуется применять в системах, в которых элементы имеют достаточно стабильные параметры.
Параллельные корректирующие устройства. Они вводятся в цепь регулятора параллельно с другими звеньями. На рис.8.3 представлена структурная схема системы с параллельным корректирующим устройством.

Рис.8.3. Структурная схема системы
с параллельным корректирующим устройством
Здесь W1(s), W2(s) представляют собой передаточные функции заданных частей регулятора,  - передаточная функция параллельного корректирующего звена, WОУ(s) - передаточная функция объекта управления.
- передаточная функция параллельного корректирующего звена, WОУ(s) - передаточная функция объекта управления.
Передаточная функция регулятора с параллельным корректирующим устройством
WR2(s)=W1(s)[W2(s)+ ]. (8.6)
Коррекция систем управления с помощью параллельного корректирующего устройства эффективна, когда требуется формировать сложные законы управления с введением производных и интегралов от сигнала ошибки. Примером этому могут служить ранее рассмотренные типовые регуляторы.
Обратные связи. Они вводятся в цепь регулятора и охватывают какие-либо его звенья. Обратные связи могут быть положительными (ПОС) и отрицательными (ООС), кроме того - жесткими и гибкими.
На рис.8.4 представлена структурная схема системы с корректирующей обратной связью. Здесь W1(s), W2(s) представляют собой передаточные функции заданных частей регулятора, WОС(s) - передаточная функция корректирующей обратной связи, WОУ(s) - передаточная функция объекта управления.
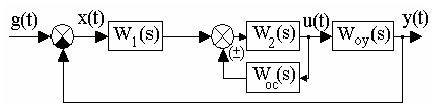
Рис.8.4. Структурная схема системы с корректирующей обратной связью
Передаточная функция регулятора с корректирующей обратной связью
WR3(s) = W1(s) W2(s)/ 1+ W2(s) WОС (s), (8.7)
где знак “+” соответствует ООС, знак “−” - ПОС.
Коррекция местной обратной связью используется в системах автоматического управления наиболее часто. Корректирующая обратная связь образует в системе внутренний контур помимо контура, образуемого главной обратной связью. В подавляющем большинстве случаев используются отрицательные корректирующие обратные связи, однако могут применяться также и положительные обратные связи, например в комбинированных системах с компенсацией динамических ошибок. Отрицательная корректирующая обратная связь позволяет существенно ослаблять влияние изменения параметров элементов и их нелинейностей, входящих в местный контур. Поэтому местной обратной связью желательно охватывать те элементы корректируемой системы, которые в процессе работы могут изменять свои параметры и имеют высокие значения коэффициентов передачи.
К другим способам повышения качества САУ можно отнести:
Общие методы повышения точности работы систем управления [43]:
1) увеличение общего коэффициента передачи разомкнутой системы;
2) применение управления по производным от ошибки;
3) повышение степени астатизма.
Увеличение общего коэффициента передачи k разомкнутой цепи является универсальным и эффективным методом повышения точности и быстродействия системы. При этом уменьшаются все виды установившихся ошибок системы. Увеличение k осуществляется последовательным введением усилительного звена в прямую цепь системы. Иногда это достигается путем повышения коэффициентов передачи отдельных звеньев. Однако увеличение общего коэффициента передачи ограничивается устойчивостью системы. В этом сказывается противоречие между требованиями к точности и устойчивости системы. Поэтому увеличение общего коэффициента передачи до значения, при котором обеспечивается требование к точности системы, может производиться при одновременном повышении запаса устойчивости с помощью введения корректирующих устройств.
Введение управления по производным от ошибок. Это простейший метод улучшения качества работы системы. Технически это реализуется различными дифференцирующими звеньями.
Улучшение переходных процессов обычно достигается введением в прямую цепь дифференцирующих звеньев, что позволяет реализовать работу САУ с прогнозом. Введение дифференцирующих звеньев в систему добавляет положительную фазу и, следовательно, повышает запас устойчивости системы, что дает возможность увеличить общий коэффициент передачи k и тем самым улучшить точность управления. Последовательное включение в цепь САУ дифференцирующих элементов (опережающих по фазе) позволяет ускорить протекание переходного процесса
Введение интеграла от ошибки является методом создания или повышения степени астатизма системы управления, а значит, и увеличения ее точности. Физически повышение степени астатизма достигается за счет введения в систему управления интегрирующих звеньев. Последовательное включение в цепь САУ интегрирующего элемента (отстающего по фазе) позволяет снизить установившуюся ошибку.
Однако включение каждого интегратора в прямую цепь системы вносит отрицательный фазовый сдвиг −900, ухудшая тем самым устойчивость и качество переходного процесса.
В случае введения двойного интеграла система становится структурно неустойчивой (неустойчивой при любых значениях параметров).
Таким образом, повышение степени астатизма неблагоприятно сказывается на устойчивости и качестве переходного процесса системы. Поэтому одновременно с повышением степени астатизма в системе приходится использовать корректирующие устройства.
Используя последовательную интегро-дифференцирующую цепь можно значительно повысить коэффициент усиления системы и увеличить ее частоту среза, а следовательно повысить точность системы в установившемся и переходном режимах.
Устойчивость и необходимый запас устойчивости обычно обеспечиваются введением форсирующего звена, при этом увеличивается быстродействие системы, но вместе с тем увеличивается и влияние помех.
Другой путь обеспечения устойчивости – использование демпфирования с подавлением высоких частот. Для этого вводится апериодическое звено с постоянной времени значительно большей постоянных времени апериодических звеньев разомкнутой системы.
Для получения астатизма системы используются изодромные звенья. При большой постоянной времени изодрома запас устойчивости практически сохраняется без изменения.
ЛЕКЦИЯ 14
СИНТЕЗ СИСТЕМ







