Ход рабочего органа.............. 100 мм
Рабочее давление рп.............. 64 кгс/см2
Сила деформирования............. до 16 тс
Регулирование амплитуды колебании рабочего
органа в пределах.............. 0,2—10 мм
Регулирование частоты колебаний рабочего
органа в пределах................ 20 — 2 Гц
Диаметр рабочего поршня........... Dп = 180 мм
Диаметр подпорного поршня.......... dп = 10 мм
Диаметр плунжера............... dпл= 12 мм
Передаточное отношение
рычага обратной связи 
Масса груза на золотнике........... 30 кг
Однокоординатные многокаскадные приводы
Вследствие гидростатической неуравновешенности, возникающей в результате погрешностей изготовления золотниковых пар, действия реактивных сил от потоков жидкости и других явлений, связанных с работой дроссельных золотников, сила, необходимая для перемещения дроссельного золотника относительно корпуса, возрастает с увеличением его диаметра, подведенного давления и величины протекающего потока. Поэтому при значительных скоростях копирования и нагрузках в однокаскадных приводах для обеспечения надежной работы сила натяжения пружины, действующей на золотник, должна быть значительной, В результате контактная сила между щупом и шаблоном может составлять 1—3 кгс и более.
Стремление значительно уменьшить действие щупа на шаблон и ограничить его силами в десятки грамм привело к созданию многокаскадных гидравлических приводов, в которых между золотником, кинематически связанным с щупом, и силовым двигателем устанавливается дополнительный гидравлический усилитель. Необходимость обеспечения незначительной величины силы управления гидроусилителем характерна также для всех комбинированных электро- и пневмогидравлических приводов.
Рассмотрим несколько типовых схем двухкаскадных приводов. Схема двухкаскадного привода показана на рис. 17,а. Перемещения щупа 7, задаваемые шаблоном 8, сообщаются управляющему четырехщелевому золотнику 3 малого диаметра, корпусом для которого является распределительный четырехщелевой золотник 4 большого диаметра. Масло под давлением к среднему бурту управляющего золотника подводится через канал 6, слив у крайних буртов осуществляется по каналам 5, а проточки между буртами соединены каналами 2 и 9 с торцовыми полостями распределительного золотника. Нетрудно проследить, что благодаря такой конструкции распределительный золотник полностью повторяет перемещения управляющего золотника, а значит и щупа. При обводе щупом 7 контура шаблона 8 распределительный золотник управляет работой силового цилиндра / так же, как в однокаскадном приводе. Этот привод (рис. 17, а) позволяет осуществлять перемещения щупа от незначительных сил.
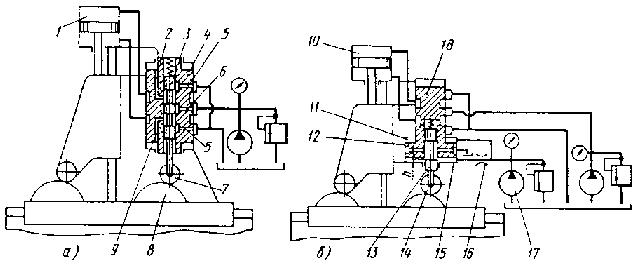
Рис. 17. Схемы однокоординатных двухкаскадных гидравлических следящих приводов с гидроусилителями:
а — в форме двух-четырещелевых золотников; б — в форме одно- и четырехщелевых золотников
По подобной схеме с применением двух- и одношелевых управляющих золотников может быть построено множество вариантов многокаскадных приводов. Например, на рис 17, б показана схема привода с управляющим однощелевым и распределительным четырехщелевым золотниками. В этом приводе щуп 14 жестко соединен с однощелевым управляющим золотником 13 малого диаметра, распределительный золотник 18 — четырехщелевой и жестко связан с поршнем 12 дифференциального действия. Масло от насоса 17 низкого давления поступает в полость //, а через дроссель 16 — в полость 15 по сторонам поршня, откуда, пройдя через щель h сливается в бак. При среднем положении управляющего золотника в полости 15 устанавливается пониженное давление, так что силы, действующие по обе стороны поршня, уравновешиваются и распределительный золотник остается неподвижным.
При смещении щупа и управляющего золотника, например, вниз (по схеме) проходное сечение щели h между кромками управляющего золотника и поршнем увеличивается, давление в полости 15 понижается и распределительный золотник перемещается до тех пор вниз, пока вновь не установится равновесие -сил по сторонам поршня. Таким образом, распределительный золотник повторяет перемещения управляющего золотника, а значит, и щупа. При обводе щупом 14 контура шаблона распределительный золотник управляет работой силового цилиндра 10 так же, как и в однокаскадном приводе.
Многокаскадные схемы в однокоординатных следящих приводах станков применяются ограниченно главным образом вследствие их сложности (по сравнению с однокаскадными схемами), а также в связи с изготовлением шаблонов из материалов (.сталь, бакелит, пескомасса), допускающих значительные контактные силы со стороны щупа. Кроме того, контактные силы в однокаскадных приводах можно несколько снижать введением круговой осцилляции золотника.
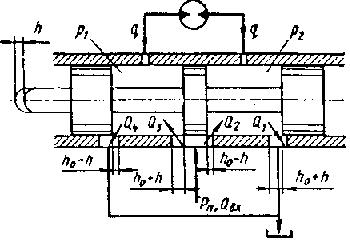
Рис. 53. Расчетная схема четырех щелевого золотника с открытыми щелями