Конструкция электрогидравлического преобразователя с гидроусилителем сопло-заслонка — золотник и пружинным подпором золотника показана на рис. 75. Гидроусилитель строится по конструктивной схеме, приведенной на рис. 70. В качестве постоянных балансных дросселей 9 могут применяться как одиночные жиклеры, так и пакет дросселирующих шайб, позволяющий иметь дросселирующие отверстия большего диаметра no-сравнению с одиночным жиклером, в результате чего повышается надежность работы и в меньшей степени сказывается влияние облитерации. Конструкция и расчет пакетов дросселирующих шайб рассмотрены в работах [12, 13, 53]. В электрогидравлическом преобразователе используется электромеханический преобразователь 1 с подвижным якорем 2, закрепленным в пружинном элементе 3, представляющем собой тонкостенный (0,05—0,2 мм) стальной цилиндр. Заслонка 4, жестко соединенная с якорем, в процессе работы перемещается между соплами 5, имеющими осевую регулировку с помощью резьбы. В нагнетательной магистрали системы управления устанавливается фильтроэлемент 10, предохраняющий от засорения балансные дроссели. Пружины 6 по торцам золотника выполняются обязательно одинаковыми и помещаются в самоустанавливающихся шайбах с конусными опорами 8 для исключения радиальных сил на золотнике. Натяг пружин регулируется резьбовыми пробками 7. Для обеспечения легкой подвижности золотника и высокой чувствительности преобразователя служит режим осцилляции высокой частоты и небольшой амплитуды, сообщаемый золотнику по линии: электромеханический преобразователь— заслонка — гидравлические магистрали р 3, р 4. Параметры такого преобразователя следующие: ток управления hmax = ± 20 мм, наибольший ход заслонки hmax = ± (0,05 - 0,1) мм, диаметр сопел d3 = 0,5 - 1,2 мм, диаметр золотника d3 = 6 - 10 мм, ход золотника xmax= 0,5 - 1 мм. Подобные преобразователи работают при давлениях 70, 140 и 210 кгс/см2.
|
| |  |
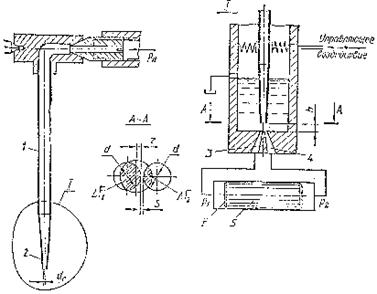
Рис. 75. Конструкция электрогидравлического преобразователя с гидроусилителем сопло-заслонка — золотник и пружинным подпором
Рассмотренный преобразователь имеет простую конструкцию. Однако пружинный подпор золотника, который сложен в исполнении, ограничивает возможности по мощности, так как жесткость пружин при прочих равных условиях пропорциональна квадрату диаметра d3 золотника, определяющего предельный расход жидкости на выходе преобразователя. Понижать давление в системе управления для уменьшения потребной жесткости пружин не рекомендуется, так как это ухудшает динамические характеристики преобразователя. Принятая схема гидравлического усилителя ограничивает его быстродействие. Поэтому в гидроприводах станков все шире начинают применяться преобразователи, в которых исключено подпружинивание золотника.
Гидроусилители со струйной трубкой. В этих усилителях основным элементом управления является струйная трубка 1 (рис. 5.19), Жидкость под давлением рН = 0,4.,.1,0 МПа поступает в струйную трубку через ее ось поворота. На выходе трубки имеется сопло 2 с диаметром dc = 1...2 мм и углом конусности 8...15°. Конусность необходима для увеличения запася кинетической энергии движущейся жидкости (v ≈ 30...50 м/с). Выходя из трубки, жидкость попадает в два приемных окна диаметром d, расположенных на расстоянии hот трубки. Обычно d= 2...2,5 мм; h ≈ 4 dc, В большинстве конструкций расстояние между приемными окнами S = 0,2...0,5 мм. Скорость жидкости, попадающей в приемные сопла, уменьшается во много раз, поэтому в них кинетическая энергия быстродвижущейся преобразуется в потенциальную энергию давления.
Управляют гидроусилителем, поворачивая струйную трубку вокруг оси О. Для этого достаточно приложить силу (2...5)10-2 Н. Если струпная трубка расположена симметрично относительно приемных сопел 3 и 4, то в них образуется одинаковое давление. Смещение трубки (см. «управляющее воздействие»), например, увеличивается площадь  приемного окна 3, перекрытого, и уменьшается перекрытая струей площадь
приемного окна 3, перекрытого, и уменьшается перекрытая струей площадь  приемного окна в результате создавшегося перепада давлений гидродвигатель, золотник 5, начинает перемещаться.
приемного окна в результате создавшегося перепада давлений гидродвигатель, золотник 5, начинает перемещаться.
Рис. 5.19. Конструктивная схема гядроусилителя со струйной трубкой
СПИСОК ЛИТЕРАТУРЫ
1. Аксиально-поршневой регулируемый гидропривод. Под ред. В. Н. Прокофьева. М., «Машиностроение*, 1969, 496 с.
2. Барун В. А., Буднинский А. А. Станки с программным управлением и программирование обработки. Л., «Машиностроение», 1965, 348 с.
3. Башта Т. М. Машиностроительная гидравлика. Справочное пособие. М., Машгиз, 1963, 696 с.
4. Башта Т. М. Реактивные силы потока жидкости в плунжерных парах гидроагрегатов.— «Станки и инструмент», 1956, № И, с. 12—13.
5. Белянин П. Н., Черненко Ж. С. Авиационные фильтры н очистители. гидравлических систем. М., «Машиностроение», 1964, 294 с.
6. Бессекерский В, А. Динамический синтез систем автоматического регулирования. М., «Наукз», 1970, 576 с.
7. Бессекерский В. А„ Попов Е. П. Теория систем автоматического регулирования. М., «Наука», 1972, 768 с.
8. Блэкборн Дж., Ритхоф Г., Шерер Дж. Л. Гидравлические пневматические силовые системы управления. М., Изд-во иностр. лит., 1962, 614 с.
9. Брон Л. С., Тартаковский Ж. Э. Гидравлический привод агрегатных станков и автоматических линий _М., «Машиностроение», 1974, 356 с.
10. Булгаков А. А. Программное управление металлорежущими станками. М — Л., Госэнергонздат, 1959, 127 с.
П. Бычатин Д. А., Гольдман И. Я. Поворотный индуктосин. Л., «Энергия», 1969, 100 с.
12. Гамыннн Н. С. Гидравлический привод системы управления; М., «Машиностроение», 1972, 376 с,
13. Гидравлический следящий привод. Под ред. В. А. Лещенко. М., «Машиностроение», 1968, 564 с.
14. Гидравлическое оборудование. Каталог-справочник, ч. 1—2, М., ВНИИГидропривод, 1967. ч. 1—400 с., ч, 2—350 с.
15. Гомельский Ю. С. Электрические элементы электрогидравлнческих устройств автоматики. М., «Энергия», 1968, 144 с.
16. Гудилкнн Ю. И. К п. д. следящего гидропривода дроссельною регулирования.— «Станки и инструмент», 1966, № 4, с. 1.
17. Динамика гидропривода. Под ред. В. Н. Прокофьева, М., «Машиностроение*. 1972. 292 с.
18. Ермаков В. В, Гидравлический привод металлорежущих станков. М., Машгкз, 1963. 324 с.
19. Зайченко И. 3., Мышлевский Л. М. Пластинчатые насосы и гидромоторы. Изд. 2-е перераб. и доп. М., «Машиностроение», 1970, 232 с.
20. Зусман В. Г. Программное управление станками с шаговым приводом.—«Электричество», 1962..V» Ю. с. 5—6.,
0! Ич-кн \\ г., BeKupoR Я. А. Технология изготовления прецизионных -•....••-... — Р'л;рпвода. М., «Машиностроение», 1971, 160 с.
22. Каменецкий Г. И. Гидравлические усилители крутящих моментов.— «Станки и инструмент», 1962, Лгэ 1, с. 3—8.
23. Касимов А. М., Вайсер И. В., Яроль В. М. Система модулей струйной техники CiMCT-2 (дискретная ветвь). М., «Институт проблем управления», 1971, 38 с.
24. Киселев В. М. Фазовые системы числового программного управления станками. М., «Машиностроение», 1965, 376 с.
25. Козлов Н. П., Крассов И. М. Электромагнитные пропорциональные управляющие элементы. М.— Л., «Энергия», 1966, 112 с.
26. Красников И. И. Облитерация капиллярных щелей при течении минеральных масел.— «Инженерно-физический журнал», 1971, № 2.
27. Крассов И. М. Гидравлические элементы в системах управления Изд. 2-е, перераб. и доп. М., «Машиностроение», 1967, 256 с.
28. Левина 3. М., Решетов Д. Н. Контактная жесткость машин. М., «Машиностроенне», 1971, 264 с.
29. Лещенко В. А. Возможности создания числовых позиционных систем ., программного управления на основе гидравлических следящих приводов.— В кн.: Привод и управление точных перемещений. М., «Наука», 1969, с. 111 — 121.
30. Лещенко В. А. Гидравлические следящие приводы для автоматизации станков. М„ Машгиз, 1962, 368 с,
31. Лещенко В. А. Актуальные задачи развития гидравлических следящих \ > приводов.— В кн.: Пневматика и гидравлика. Приводы и системы управления. ' Вып. 1, М., «Машиностроение», 1973, с. 71—84.
32. Лещенко В. А., Почтарь Ю. С., Реэдик В. И. Струйные измерительные элементы для датчиков положения систем точного позиционирования.— «Приборы и системы управления», 1974, № 1, с. 40—42.
33. Лещенко В. А., Почтарь Ю. С. Опыт создания пневмогидравлической струйной системы числового программного управления станками.— В кн.: Пневматические средства и системы управления, М., «Наука», 1970, с. 306—316.
34. Лещенко В. А., Гудилкин Ю. И. О возникновении кавитации при автоколебаниях гидравлических следящих приводов.— «Станки и инструмент», 1967, № 6, с. 13.
35. Лещенко О. Д. Коррекция гидравлического привода цепью сопротив- \- ление—емкость, параллельной двигателю.— В кн.: Исследование, расчеты и ' конструирование тяжелых металлорежущих станков, М., НИИМАШ, 1970. с. 339—349.
36. Металлорежущие станки. М., «Машиностроение», 1965, т. 1 и 2, 764 с„ 628 с.
37. Металлорежущие станки с числовым программным управлением. Каталог. М., НИИМАШ, 1972, 260 с.
38. Объемные гидравлические приводы. М., «Машиностроение», 1959, 628 с.
39. Попов Д. Н. Об особенностях нестационарных потоков в трубах.— «Известия вузов СССР. Машиностроение». 1972, № 7, с. 78—82.
40. Почтарь Ю. С. Некоторые вопросы исследования струйной системы числового программного управления.— В кн.: Автоматизация привода, управления и контроля в машиностроении. М., «Наука», 1974, с. 42—49.
41. Приводы объемно-дроссельного регулирования для оборудования с числовым программным упртвленнем.— «Вестник машиностроения». 1973. V № П. с. 18-22.
42. Пульер Ю. М. Индукционные электромеханические элементы вычислительных я дистанционно-следящих систем. М.. «Машиностроение». 1965, 295 с.
43. Ратмиров В. А., Чурин И. Н., Шмутер С. Л. Повышение точности и производительности станков с программным управлением. М, «Машиностроение». 1970. 344 с.
44. Сосонкин В. Л. Дискретная гидроавтоматика. М., «Машиностроение», 1972, 164 с.
45. Срибнер Л. А.. Шраго Л. К. Проектирование позиционных систем программного управления. Киев, Машпп, 1962, 308 с.
46. Современные методы проектирования систем автоматического управления. Анализ и синтез. Под общ. ред. Б. Н. Петрова, В. В. Солодовннкоэа, Ю. И. Топчеева. М., «Машиностроение». 1967, 704 с.
47. Теория автоматического регулирования. Под ред. В. В. Солодовннко-ва. М.. «Машиностроение»,!967, Кн. 1, 346 с.
48. Тумаркин М. Б. Гидравлические следящие приводы. М.. «Машиностроение», 1966, 296 с.
49. Хаймовнч Е. М. Гидроприводы и гпдроавточэгика станков. М.— Киев. Машги t, 1959, 556 с.
50. Честнат Г., Манер Р. В. Проектирование и расчет следящих систем и систем регулирования. М.— Л., Госэнергонздаг, 1959. ч.1—i87 с., ч. 2—392 с., / 51. Экспериментальное исследование упругих свойств деу.хфазны.х рабочих ' жидкостей гидроприводов объемного типа.— «Известия вузов СССР Машиностроение». 1963, Л? 2. с. 87—93.
52. Электрические измерительные преобразователи. М.— Л„ «Энергия», 1967, 408 с.
53. Элекгрогндравлнческие следящие системы. Под ред. В. А. Хохлова. М., «Машиностроение», 1971, 432 с.
54. Fluidics in production engineering. «Mach. and Product. Engin>, 112, N 2886, 1968.
55. Foster K. & Parker G. A. Fluidics. Publisched by John \Viley & Sons, 1970.
56. Gwillim D. Т., Mattison A. V. A fluidic — controlled coordinate table. <Syst. Technol.», N 10, 1970,
57. Hydro-Point /Bridgeport numerically controlled milling machine Moog pneumatic/ hydraulic control system. «Mach. Market», N 3406. 1966.
58. Miroslav Drazdtl. The Application of Pressure Feedback for Damping at electro-hydraulic servo drives. «Hydraulic Pneumatic power». October 1972, p.p. 458—465.