Принцип действия простейшего гидравлического следящего привода с копировальным управлением
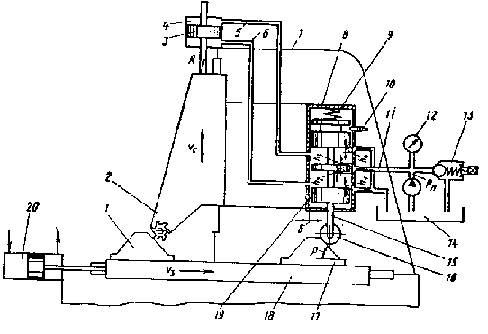
Схема простейшего гидравлического следящего привода представлена на рис. 1. Привод показан при использовании его на фрезерном станке для получения на заготовке 1 фасонного профиля шаблона 17. Насос подает масло по трубопроводу 11 в среднее окно корпуса 8 управляющего золотника 19, положение которого определяется циркуляцией масла через щели h1, h2, h3 и h4, образованные кромками шеек золотника 19 и окон корпуса 8. Силовой цилиндр 4 следящего привода закреплен на неподвижной стойке 7 станка. Шток поршня 3 соединен с вертикальной кареткой 2, несущей корпус управляющего золотника и режущий инструмент. Давление в гидросистеме устанавливается переливным клапаном 13 и контролируется манометром 12. Один конец золотника имеет рычаг 15, несущий щуп 16, другой находится под действием пружины 9. Когда щуп отведен от шаблона 17, пружина 9 перемещает золотник 19 в крайнее нижнее положение на схеме. При этом положении золотника проходное сечение щели h2 значительно меньше, чем щели h3, а проходное сечение щели h1больше щели h4. В результате этого поток масла, поступающий в нижнюю полость золотника, дросселируется (т. е. давление падает) больше, чем поток масла, поступающий в верхнюю полость золотника, а поток масла, поступающий в резервуар 14 из этой полости, дросселируется больше, чем поток масла, поступающий из нижней полости золотника.
Таким образом, в нижней полости золотника и трубопроводе 6 устанавливается низкое давление, а в верхних полостях золотника и цилиндра и трубопроводе 5 — высокое. Вследствие этого поршень и шток вместе с вертикальной кареткой 2, управляющим золотником и режущим инструментом перемещаются вниз. В процессе перемещения щуп 16 упрется в шаблон 17, но каретка будет еще некоторое время двигаться под действием вертикальной подачи. При этом проходные сечения щелей h1и h3 будут постепенно уменьшаться, а щелей h2 и h4 увеличиваться, затем наступит момент, когда проходные сечения всех щелей сравняются настолько, что разность давлений в полостях золотника и гидроцилиндра окажется недостаточной для продолжения движения поршня гидроцилиндра, и вертикальная подача прекратится.
Рис I. Схема простейшего гидравлического следящего привода с копировальным управлением
Если столу 18 сообщить от гидроцилиндра 20 постоянную скорость v3, то шаблон, при повышающемся профиле, будет перемещать щуп и золотник через среднее положение вверх до тех пор, пока проходные сечения щелей h2и h4 не увеличатся, а щелей h1 и h3 не уменьшатся настолько, что разница давлений в полостях гидроцилиндра станет достаточной для преодоления силы сопротивления движению. Это перемещение, совершаемое по команде управляющего золотника, немедленно передается ему же с помощью обратной связи, осуществленной в данном случае закреплением корпуса управляющего золотника непосредственно на вертикальной каретке. Обратная связь ослабляет командный сигнал золотника, снижая его до нуля при среднем положении золотника,
При понижении профиля шаблона щуп и золотник под действием пружины 9 будут перемещаться вниз от среднего положения до тех пор, пока проходные сечения щелей h1 и h3 не увеличатся, а щелей h2и h4 не уменьшатся настолько, что в полостях гидроцилиндра разница давлений станет достаточной для преодоления сопротивления движению, и тогда вертикальная каретка начнет перемещаться вниз. Таким образом, совокупность продольной скорости и3 шаблона и заготовки и вертикальной скорости vc
(скорость слежения) щупа и режущего инструмента обеспечивает воспроизведение профиля шаблона на заготовке. При этом щуп, обкатывая контур шаблона, находится с ним в постоянном контакте.
Для ручного управления отводом вверх фрезы от заготовки и щупа от шаблона служит рукоятка 10.
Принцип действия электрогидравлического
Следящего привода с копировальным
Управлением
В комбинированных электрогидравлических приводах сочетается электрическое управление с гидравлическими исполнительными механизмами. В результате такого сочетания облегчается дистанционность управления, что особенно удобно в крупных станках, введение дополнительных корректирующих устройств, улучшающих работу следящего привода, что обычно необходимо выполнять для получения требуемых характеристик привода и т. п.
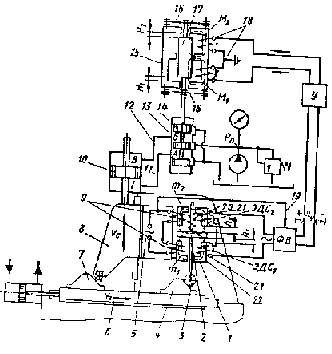
Схема простейшего электрргидравлического следящего привода с копировальным управлением приведена на рис. 4. Привод показан при использовании его на фрезерном станке. Щуп 3 кинематически связан с якорем 2 индуктивного датчика 1, а четы-рехщелевой золотник 13, подающий жидкость в полости гидроцилиндра 10, с электромеханическим преобразователем 15. Электрическая связь между индуктивным датчиком и электромеханическим преобразователем осуществляется через фазочув-ствительный выпрямитель ФВ и усилитель постоянного тока У [42].
Рис. 4. Схема простейшего электрогидравлического следящего привода с копировальным управлением
Вследствие подключения катушек 9 к источнику 5 переменного тока между корпусом и якорем индуктивного датчика циркулируют магнитные потоки m1 и т2 (обозначены штриховыми стрелками), которые индуктируют в катушках 21 э.д.с.1 и э.д.с.2, сдвинутые по фазе на 180°. При равных зазорах (h1 = h2) между якорем и корпусом магнитные потоки m1 и т2 и э.д.с.1 и э.д.с.2, также равны между собой, в результате чего на входе и выходе ФВ напряжения будут равны нулю. Когда щуп смещается, например, ниже среднего положения, зазор h1 между якорем 2 и корпусом 22 становится меньше зазора h2.
Вследствие повышения магнитной проницаемости в зазоре h1 и уменьшения ее в зазоре h2 происходит соответствующий рост магнитного потока m1 и индуктируемой э.д.с.1, а также уменьшение магнитного потока т2 и э.д.с.2 относительно среднего положения. Разность э.д.с.1 и э.д.с.2 подается (после усиления) на вход ФВ, на выходе которого образуется пропорциональное этой разности напряжение управления постоянного тока (сигнал управления) Uу. Знак его определяется в результате сопоставления фазы переменного тока на входе в ФВ с фазой опорного напряжения, подводимого по линии 19, и изменяется в зависимости от направления отклонения якоря 2 от среднего положения.
Пружины 16 электромеханического преобразователя стремятся установить сердечник 17 в среднее положение, при котором зазоры H1 и H2 между сердечником и торцами корпуса равны. При дифференциальной схеме включения катушек 18 преобразователя 15 и сигнале управления Uу = 0 напряжения и токи на обеих катушках 18 равны и составляют половину напряжения питания усилителя У. Вследствие этого магнитные потоки M1, M2 и встречные силы, действующие по зазорам H1 и H2 между сердечником и корпусом, будут также равны (при симметричной конструкции), а сердечник и золотник 14 будут занимать среднее положение.
При появлении сигнала управления Uy, возникающего от смещения щупа 3 и якоря 2, например, ниже среднего положения, напряжение в нижней катушке 18 будет возрастать пропорционально Uy, а в верхней катушке 18 соответственно уменьшаться, в результате чего пропорционально изменятся магнитные потоки M1, M2 и возникнет электромагнитная сила, стремящаяся сместить вниз сердечник преобразователя. Вследствие действия пружин 16 это смещение будет пропорциональным величине электромагнитной силы, а значит величине смещения якоря индуктивного датчика. При смещении щупа и якоря выше среднего положения описанный выше процесс повторяется, причем сигнал управления Uy меняет знак и соответственно электромагнитная сила действует на сердечник преобразователя в противоположном ранее указанному направлению — вверх. Таким образом, золотник 14, жестко соединенный с сердечником, повторяет в определенном масштабе перемещения якоря и щупа индуктивного датчика. Масштаб повторения зависит от параметров элементов, находящихся в цепи между щупом и золотником.
Схема золотника и питающей его насосной установки аналогичны показанным на рис. 1.
Поэтому, с учетом описанного выше порядка работы цепи щуп — золотник, когда щуп не касается контура шаблона 4 и под действием пружины 20 смещается в крайнее нижнее на рис. 4 положение, такое же перемещение осуществляет золотник 14. В результате, в полости А, трубопроводе 11 и полости Г устанавливается низкое давление, а в полостях Б и В и трубопроводе 12 — высокое. Вследствие этого поршень и шток вместе с вертикальной кареткой 8, индуктивным датчиком и режущим инструментом перемещается вниз. В процессе перемещения щуп 3 упрется в шаблон 4, но каретка будет еще некоторое время двигаться под действием вертикальной подачи. При этом зазор h1 будет постепенно увеличиваться, а зазор h2 уменьшаться; соответственно будет уменьшаться величина сигнала управления Uy, а значит разность магнитных сил, действующих на сердечник электромеханического преобразователя и смещение золотника 14 от среднего положения. Наконец, наступит момент, когда величины зазоров h1 и h2 и соответственно проходные сечения всех щелей золотника сравняются и разность давлений в полостях Б и А, а также В и Г станет недостаточной для продолжения движения поршня гидроцилиндра, и вертикальная подача прекратится. Если столу 6 сообщить задающую подачу, то будет так же, как в простейшем приводе, показанном на рис.1, осуществляться обвод контура шаблона и его воспроизведение на заготовке 7.
Следовательно, принцип действия и структура построения электрогидравлических следящих приводов аналогичны приводам с механическим управлением и отличаются только средствами передачи команд от задающего устройства к золотнику, управляющему работой гидродвигателя. Так, если в следящем приводе (см. рис. 1) щуп с помощью механической передачи непосредственно воздействовал на управляющий золотник, то в электрогидравлическом следящем приводе (см. рис. 4) механические перемещения щупа преобразуются в электрические сигналы индуктивного датчика, которые усиливаются и преобразуются электромеханическим преобразователем в перемещения, сообщаемые управляющему золотнику. Таким образом, механическая передача в этом случае заменена цепочкой преобразователей, выполняющих ее функции.
Структурная схема электрогидравлического следящего привода с копировальным управлением показана на рис. 5. В этой схеме дополнительно вводятся следующие понятия.
Гидроусилитель ГУ — гидравлическое устройство управления, в котором производится усиление мощности входного сигнала за счет энергии внешнего гидравлического источника питания.
Рис. 5. Структурная схема электрогидравлического следящего привода с копировальным управлением
Электромеханический преобразователь ЭМП — устройство, преобразующее электрические входные команды в соответствующие им выходные механические перемещения.
Электрогидравлический преобразователь — устройство, преобразующее электрические входные команды в соответствующие им перемещения золотника, создающие расход рабочей жидкости во внешней цепи; обычно состоит из электромеханического преобразователя и гидроусилителя. Функции сравнивающего устройства СУ в схеме на рис.5 выполняет индуктивный датчик, причем вырабатываемый им сигнал рассогласования X1 усиливается усилителем У.