Однокоординатные однокаскадные гидравлические следящие приводы дроссельного регулирования с независимой задающей скоростью строятся в соответствии со структурной схемой, показанной на рис. 3. В качестве источника воздействия в этих приводах применяется обычно механизм подачи, создающий относительное перемещение задающего устройства (шаблона) или сравнивающего устройства (копировального прибора) по координате, расположенной перпендикулярно или под некоторым углом к направлению следящей подачи. Управление гидродвигателем следящей скорости осуществляется управляющими четырех-, двух- и однощелевыми золотниками.
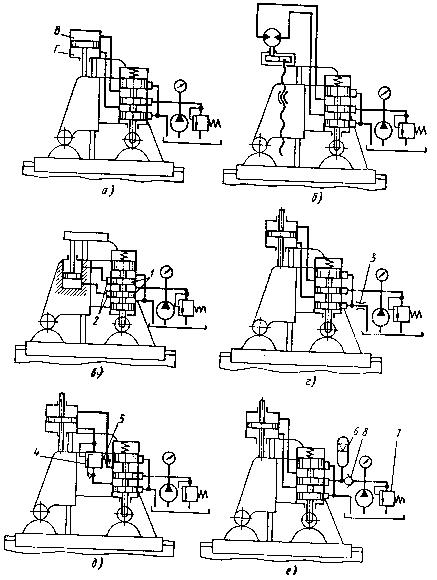
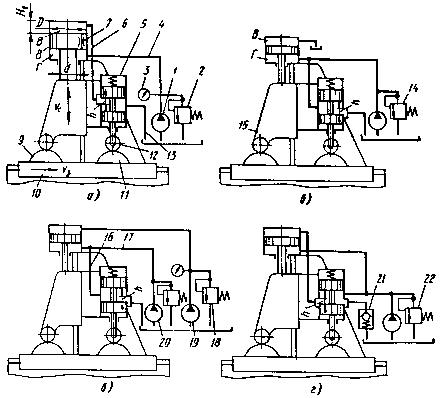
Привод с четырехщелевым золотником. Этот привод наиболее широко применяется в копировальных станках вследствие того, что он обеспечивает по сравнению с другими схемами большую точность копирования, обладает высокой чувствительностью и позволяет ocyществлять разнообразные схемные варианты, расширяющие эксплуатационные качества оснащённого им оборудования (рис. 11).
В приводе с четырехщелевым золотником могут использоваться в качестве силовых двигателей кроме гидроцилиндров с двухсторонним штоком, гидроцилиндры с односторонним штоком (рис. 11, а) и гидромоторы (рис. 11, б). При использовании гидроцилиндра с односторонним штоком привод будет находиться в равновесии при некотором смещении золотника от среднего положения относительно окон во втулке, например, вверх на схеме, показанной на рис. 11, а, при котором в штоковой полости Г гидроцилиндра устанавливается более высокое давление, чем в полости В, так что силы, действующие по обеим сторонам поршня цилиндра, уравновешиваются.
В схеме, изображенной на рис. 11, а, гидравлический цилиндр неподвижен (он закреплен на стойке станка), а поршень и шток приводят в движение вертикальные салазки станка. Иногда бывает удобней выполнять компоновку станка таким образом, чтобы приводить в движение цилиндры, а шток с поршнем закреплять неподвижно. При этом для устранения перекрещивания трубопроводов, идущих от золотника к полостям цилиндра, удобно применять четырехщелевой золотник с несколько измененным расположением рабочих кромок (рис. 11, в), сосредотачивая их на двух средних буртах золотника. Принципиально эта схема аналогична предыдущим. Конструкцию золотника с расположением четырех рабочих кромок на двух средних буртах иногда предпочитают также в связи с тем, что в этом случае в корпусе золотника необходимо выполнять не три, а два мерных окна или расточки 2.
При применении гидромотора принцип действия гидравлического следящего привода, а также образование погрешности воспроизведения и достижение устойчивости равновесия сохраняются такими же, как было рассмотрено выше.
Преобразование вращательного движения вала мотора в поступательное перемещение рабочего органа осуществляется при длине хода до 3—4 м с помощью редуктора и пары винт — гайка, а при большей длине — пары шестерня — рейка. В тяжелых станках с большой длиной хода широко применяются винтореечные передачи. Переход от гидроцилиндра к гидромотору обычно осуществляется при длинах ходов свыше 0,5—1 м, при этом учитываются особенности применения гидромоторов в следящих приводах.
Рис. 11. Варианты схем однокоординатных следящих приводов с управляющим четырехщелевым золотником
Скорость подвода рабочего органа к детали и отвода его можно регулировать с помощью дросселя 3 или дросселя с регулятором, установленного на сливе из управляющего золотника (рис. 11, г). После постановки щупа на шаблон, до включения задающей подачи, дроссель полностью открывается. Если рабочий орган перемещается от гндроцилиндра по вертикальным направляющим и не уравновешен контргрузом, в приводе с четырехщелевым золотником можно автоматически предотвратить быстрое самопроизвольное опускание вертикального ползуна при выключении насоса путем установки (рис. 11,  ) в трубопроводе, соединяющем нижнюю полость гидроцилиндра с управляющим золотником, напорного золотника с обратным клапаном 4, настроенного на давление, достаточное для создания в нижней полости цилиндра силы, поддерживающей неуравновешенный вес. При работе привода напорный золотник не препятствует проходу масла. При выключении насоса и падении давления в гидросистеме напорный золотник под действием пружины 5 перемещается влево, преграждая выход маслу из нижней полости " гидроцилиндра. При этом ползун может медленно опускаться в результате утечки масла через зазоры в поршневых кольцах.
) в трубопроводе, соединяющем нижнюю полость гидроцилиндра с управляющим золотником, напорного золотника с обратным клапаном 4, настроенного на давление, достаточное для создания в нижней полости цилиндра силы, поддерживающей неуравновешенный вес. При работе привода напорный золотник не препятствует проходу масла. При выключении насоса и падении давления в гидросистеме напорный золотник под действием пружины 5 перемещается влево, преграждая выход маслу из нижней полости " гидроцилиндра. При этом ползун может медленно опускаться в результате утечки масла через зазоры в поршневых кольцах.
|
| |  |
Привод с четырехщелевым золотником позволяет осуществлять следящие подачи большой величины при пропорциональном увеличении погрешности воспроизведения. При кратковременном режиме копирования с высокими следящими подачами в качестве источника питания в приводе с четырехщелевым золотником можно применять пневмогидравлический аккумулятор, который включается в нагнетательный трубопровод, соединяющий насос с управляющим золотником копировального прибора (рис. 11,
е).
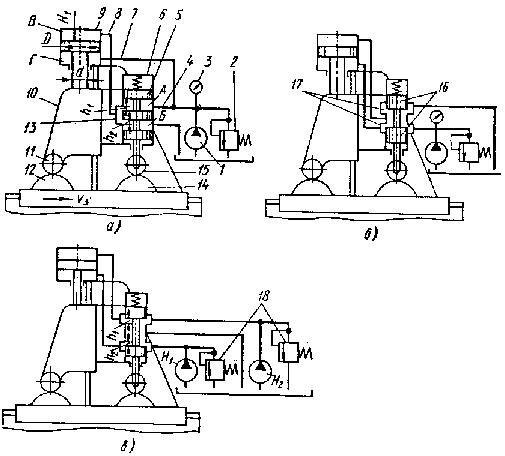
Рис. 12. Схемы однокоординатных гидравлических следящих приводов с двухщелевым управляющим золотником
Для предотвращения разрядки аккумулятора 6 через насос (при выключении его работы) или предохранительный клапан с переливным золотником 7 {в результате инерционности клапана) перед аккумулятором обычно устанавливается обратный клапан 8.
Привод с двухщелевым золотником. Стремление упростить конструкцию четырех щелевого золотника, уменьшить его габаритные размеры и снизить трудоемкость изготовления вследствие уменьшения количества мерных шеек на золотнике и окон в корпусе привело к созданию приводов с двухщелевым золотником.
Двухщелевой управляющий золотник часто применяется в однокоординатных следящих приводах (рис. 12). Нагнетаемое насосом / масло подается по трубопроводу 7 в нижнюю штоковую полость Г силового цилиндра 9, а по трубопроводу 4 в полость А золотника 5. Полость Б золотника соединена со сливом. Давление масла р Пв нагнетательной магистрали, подводимого к управляющему золотнику копировального прибора, регулируется переливным клапаном 2 и контролируется манометром 3. Силовой цилиндр — с односторонним штоком дифференциального действия, т. е. при работе используется разность рабочих площадей в его штоковой и поршневой полостях. Корпус золотника имеет окно 13, которое выполняется несколько шире средней шейки золотника. В исходном положении золотника, когда щуп 15 не касается контура шаблона 14, под действием пружины золотник смещается ниже равновесного положения, увеличивая щель h1 и перекрывая щель h2. При этом масло из полости А золотника по трубопроводу 8 свободно, без потери давления поступает в верхнюю полость В силового цилиндра; в обеих полостях устанавливается приблизительно одинаковое давление.
Поскольку рабочая площадь поршня в верхней полости больше, чем в нижней, возникает избыточная сила, под действием которой поршень, шток, каретка 10 и связанный с ней жестко корпус золотника начинают двигаться вниз. Когда щуп достигнет поверхности шаблона, его движение вниз прекратится, а продолжающееся перемещение каретки будет осуществлять перемещение корпуса относительно золотника. При этом проходное сечение щели Л] будет постепенно уменьшаться, а щели h2 — увеличиваться, в результате чего давление в окне 13, трубопроводе 8, и поршневой полости В цилиндра будет понижаться, пока не наступит такой момент, когда силы, действующие по обе стороны поршня, настолько уравняются, что избыточная сила окажется недостаточной для продолжения движения поршня гидроцилиндра и автоматическая вертикальная подача прекратится.
Если столу сообщить задающую продольную подачу, то шаблон при повышающемся профиле переместит щуп и золотник через нейтральное положение вверх (на схеме). При этом проходное сечение щели h2 увеличится, а щели h1 уменьшится настолько, что давление в полости В цилиндра понизится до такой величины, при которой сила, действующая на поршень со стороны нижней штоковой полости цилиндра, станет больше таковой со стороны верхней полости, и избыточная сила, направленная вверх, станет достаточной для преодоления сопротивления подачи. При этом вертикальные салазки начнут перемещаться вверх, а щуп будет обкатывать поверхность шаблона. Когда щуп движется по понижающемуся профилю шаблона, золотник под действием пружины перемещается через равновесное положение вниз (по схеме) до тех пор, пока проходное сечение щели h1 не увеличится, а щели h2 не уменьшится настолько, что давление в полости В цилиндра возрастет и сила, действующая на поршень со стороны верхней поршневой полости цилиндра, станет больше таковой со стороны нижней полости, а избыточная сила, направленная вниз, станет достаточной для преодоления сопротивления подачи. При этом вертикальные салазки начнут перемещаться вниз в соответствии с наклоном контура шаблона. Таким образом, щуп обведет контур шаблона, не отрываясь от него, а инструмент 11 воспроизведет контур шаблона на заготовке 12.
Из описания работы схемы очевидно, что выводы, сделанные в разделе 2 относительно погрешности, нечувствительности и устойчивости следящего привода с четырехшелевым управляющим золотником относятся к следящему приводу с двухщелевым управляющим золотником.
Как отмечалось выше, основным достоинством привода с двухщелевым управляющим золотником является относительная простота изготовления корпуса и золотника. Вместе с тем, этот привод уступает приводу четырехщелевым золотником по возможностям варьирования схем (с двухщелевым приводом не возможно осуществить большинство схем, показанных на рис. 11) и главным образом по развиваемой силе при равных диаметрах цилиндров. Действительно, для обеспечения одинаковых сил, развиваемых цилиндром в обе стороны, диаметр d его штока выбирается таким, чтобы рабочая площадь поршня со стороны поршневой полости была в 2 раза больше таковой со стороны штоковой полости, т. е. принимается:
 (3)
(3)
где D — диаметр поршня.
При соотношении (3) и движении поршня вверх наибольшая сила развивается при падении давления в поршневой полости до нуля и составляет
р П — подведенное давление.
Эта сила равняется примерно половине силы, развиваемой гидроцилиндром недифференциального действия с диаметром D.
При движении поршня вниз наибольшая сила развивается при подъеме давления в поршневой полости до давления р П, развиваемого насосом, и составляет

Приведенная на рис.12, а схема следящего привода является наиболее распространенной из схем с двухщелевым управляющим золотником и применяется в копировальных станках, где нет больших и знакопеременных нагрузок, например в токарно-копировальных станках «TOS» (ЧССР) и др.
Иногда применяются двущелевые золотники с несколько измененным расположением рабочих кромок, при котором золотник имеет только два бурта 16 (рис. 12, б). Такая конструкция позволяет избежать перекрещивания трубопроводов, идущих к цилиндру, кто может быть в некоторых случаях удобным, обеспечивает более простое устройство золотника, однако усложняет конструкцию корпуса, в котором необходимо выполнять не одно, а два окна или две расточки 17. Принципиально схема, показанная на ряс 12.6. аналогична схеме, приведенной на рис. 12. и.
С двухщелевым золотником можно выполнить систему с цилиндром недифференциального действия при условии, что подача масла в полости цилиндра будет осуществляться двумя отдельными насосами (рис. 12, в). Масло с помощью двух насосов Н1 и Н2 одинаковой подачи поступает в обе полости цилиндра и одновременно к двум рабочим щелям золотника. Если проходные сечения h1 и h2 щелей золотника равны между собой и нет внешней нагрузки на поршень, то в обеих полостях цилиндра устанавливается одинаковое давление, определяемое одинаковыми подачами насосов и размерами проходных сечений щелей золотника. При этом поршень и вертикальная каретка будут неподвижными. Клапаны 18 в этой системе являются предохранительными и настраиваются на наибольшее допустимое давление в системе. При смещении золотника от среднего положения вверх или вниз одна из щелей увеличивается, а вторая уменьшается и соответственно изменяется давление в полостях цилиндра, причем начинается движение поршня и рабочего органа станка — вертикальной каретки в направлении смещения золотника. Жесткая обратная связь, осуществляемая закреплением корпуса золотника на вертикальной каретке, обеспечивает воспроизведение контура шаблона «а обрабатываемой заготовке.
Следящий привод с двухщелевым управляющим золотником и двумя насосами обладает высокой чувствительностью, обеспечивает высокую точность копирования, однако конструкция его сложнее предыдущих. Недостатком привода является также то, что утечки в насосах влияют на точность копирования. Применяется он в токарно-копировальных станках фирмы VDF (ФРГ).
Привод с однощелевым золотником. Этот привод дозволяет еще больше упростить конструкцию золотника и полностью исключить согласование расстояний между буртами золотника и окнами в корпусе. Однощелевой управляющий золотник наиболее часто применяется в однокоординатных следящих приводах, схемы которых приведены на рис. 13. Нагнетаемое насосом I (рис. 13, а) масло по трубопроводу 4 подается в нижнюю штоковую полость Г силового цилиндра 5, которая дросселем 7 соединена с верхней поршневой полостью В цилиндра. Давление рп, нагнетания масла регулируется переливным клапаном 2 и контролируется манометром 3. Силовой цилиндр — с односторонним штоком дифференциального действия. Верхняя полость цилиндра соединена трубопроводом 6 с управляющим золотником, из которого масло по трубопроводу 13 сливается в бак насосной установки. В золотнике масло проходит через одну щель h между рабочей кромкой шейки золотника н торцом окна в корпусе. Ширина рабочей щели зависит от положения золотника относительно корпуса. Когда щуп 12 не касается контура шаблона 11, золотник под действием пружины 5 сдвпг:1лт~я вниз, щель полностью перекрывается, прекращается выход масла из верхней полости цилиндра и в обеих полостях устанавливается одинаковое давление, определяемое настройкой переливного клапана. Так как рабочая площадь поршня в верхней полости больше, чем в нижней — штоковой, поршень вместе с кареткой и корпусом золотника будет двигаться вниз на шаблон 11 и заготовку 9. Когда щуп достигнет поверхности шаблона, золотник остановится, а каретка будет двигаться вниз до тех пор, пока рабочая щель h не откроется настолько, что давление в верхней полости цилиндра упадет, избыточная сила в верхней
|
| |  |
полости станет недостаточной для продолжения движения каретки вниз, и она остановится. Поступление масла из нижней полости в верхнюю определяется дросселем 7.
Рис 13. Схемы однокоординатных гидравлических следящих приводов с однощелевым управляющим золотником
Если столу 10 сообщить задающую продольную подачу υз, то шаблон при повышающемся профиле переместит щуп и золотник через положение равновесия вверх (по схеме), пока проходное сечение щели h и количество масла, проходящего через нее из верхней полости, не возрастет до такой величины, что сила, действующая на поршень со стороны нижней, штоковой полости цилиндра, станет больше таковой со стороны верхней полости и избыточная сила, направленная вверх, станет достаточной для преодоления сопротивления подачи. При этом вертикальная каретка начнет перемещаться вверх в соответствии с контуром шаблона.
Соответственно, при понижающемся профиле шаблона, золотник под действием пружины 5 смещается ниже положения равновесия, пока проходное сечение щели Л не уменьшится, а давление в верхней полости цилиндра не возрастет до такой величины, что сила, действующая на поршень со стороны верхней полости цилиндра, станет больше таковой со стороны нижней полости и под действием избыточной силы, направленной вниз, вертикальные салазки начнут перемещаться вниз в соответствии с крутизной контура шаблона. Таким образом, привод с управляющим золотником, имеющим одну рабочую щель в схеме с дросселем, соединяющим две полости цилиндра, работает аналогично приводу с двухщелевым золотником. Диаметр d штока силового цилиндра выбирается так же, как и в приводе с двухщелевым золотником. Обычно соотношение рабочих площадей в штоковой и поршневой полостях составляет 1:2..
Привод с однощелевым золотником и дросселем, соединяющим две полости цилиндра, уступает приводам с четырех- и двухщелевыми управляющими золотниками по точности копирования, возможности варьирования схемы. Недостатком привода является ограниченность скорости слежения вследствие небольшой пропускной способности постоянного дросселя 7, установленного в магистрали между полостями цилиндра.
В схеме следящего привода с однощелевым золотником, приведенной на рис. 13, б, постоянный дроссель отсутствует. Управление перемещениями поршня силового цилиндра осуществляется путем изменения ширины щели h между кромками золотника и окна в корпусе, при котором регулируется давление в нижней полости Г силового цилиндра. Клапан 14 в этом приводе является предохранительным и настраивается на наибольшее допустимое давление. Верхняя полость цилиндра соединяется с дренажем, а сила, действующая на поршень в направлении вниз, создается вследствие несбалансированного веса каретки /5, смонтированной на вертикальных направляющих.
В схеме приведенной на рис. 13, в, постоянная сила, действующая на поршень в направлении вниз, создается в результате присоединения верхней полости цилиндра к нагнетательной магистрали специального насоса 19, давление в которой устанавливается отдельным переливным клапаном 18.
При подводе щупа к шаблону или перемещении щупа по снижающемуся участку контура шаблона золотник под действием пружины смещается относительно корпуса ниже положения равновесия, в результате чего проходное сечение щели h возрастает, облегчается слив масла, подаваемого насосом 20 по трубопроводам 16 и 17 в нижнюю полость цилиндра и к корпусу золотника, давление в нижней полости цилиндра при этом уменьшается. Образуется избыточная сила, действующая на поршень вниз. Эта сила преодолевает сопротивление подачи и осуществляет перемещение поршня, штока и каретки вниз. Наличие жесткой обратной связи, осуществляемой закреплением корпуса золотника на вертикальной каретке, обеспечивает воспроизведение контура копира на обрабатываемой заготовке.
Следящие приводы, построенные по схемам, показанным на рис. 13, б, в, просты по конструкции.
Однако такие приводы дают пониженную точность копирования, которая зависит также от вязкости (температуры) масла и его утечки в насосе.
В приводе, схема которого показана на рис. 13, г, применяемом в копировальных устройствах фирмы «Магдебург», давление в поршневой полости цилиндра дифференциального действия определяется подпорным клапаном 21, который отрегулирован на давление, значительно меньшее, чем предохранительный клапан 22.
Подпорный клапан установлен в сливной магистрали, идущей от поршневой полости цилиндра и рабочей щели h золотника, управляющей давлением в штоковой полости силового цилиндра дифференциального действия. При смещении щупа вниз и увеличении проходного сечения щели h давление масла, подаваемого насосом, падает и в предельном случае может снизиться до давления подпорного клапана. При этом вследствие разности площадей поршень, шток и каретка будут перемещаться вниз (по схеме). Наоборот, при смещении щупа вверх и уменьшении проходного сечения щели золотника давление масла, подаваемого насосом, возрастает до предельного, определяемого настройкой предохранительного клапана, и давление в штоковой полости цилиндра превышает давление в поршневой полости настолько, что поршень и каретка будут перемещаться вверх. Воспроизведение контура шаблона на обрабатываемой заготовке в этом случае, как и в предыдущих, обеспечивается вследствие наличия обратной связи.
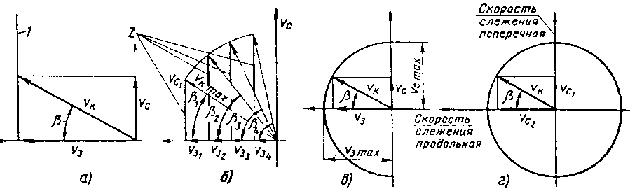
Рис. 14. Изменение скорости копирования при различных видах скорости задания
На базе четырех-, двух- и однощелевых дроссельных золотников теоретически можно построить кроме рассмотренных большое количество других схем следящих приводов, которые приведены в работе [48].
Характерной особенностью всех рассмотренных однокоординатных следящих приводов, с постоянной скоростью задания является зависимость величины скорости копирования — геометрической суммы задающей υ3 и следящей υс скоростей oт крутизны профиля шаблона. На рис. 14, а линия 1 характеризует изменение скорости копирования υк(перемещение конца вектора скорости копирования) при постоянной скорости задания υ3 для различных углов β (см. рис. 1) наклона профиля шаблона. Как следует из графика, скорость копирования определится из выражения

Таким образом, при угле наклона профиля β = 45° скорость копирования возрастает в 1,4 раза, а при β = 60° в 2 раза по сравнению со скоростью копирования на участках, параллельных скорости задания (β = 0).
Поэтому однокоординатные следящие приводы с постоянной скоростью задания обычно применяются при угле р наклона профиля шаблона не более 45°.
При необходимости обвода с помощью однокоординатного следящего привода шаблона с углами наклона профиля более 45° применяется переменная скорость задания, изменяемая ступенчато или бесступенчато.
Ступенчатое изменение скорости задания осуществляется обычно от двух- или четырехскоростного электродвигателя или от электродвигателя постоянного тока с бесступенчатым изменением оборотов.
График изменения скорости копирования при четырех ступенях задающей скорости показан на рис. 14, б (прямые 2); β1, β2 и βз— углы наклона профиля шаблона, при которых следует производить переключение скорости задания, определяются исходя из наибольшей допускаемой скорости копирования υкmax. Изменение величины скорости задания позволяет значительно повысить крутизну копируемого контура. Наибольший угол наклона профиля β4 в этом случае также не может достигать 90,° он обычно составляет 75—80°.
Для получения постоянной величины скорости копирования и возможности воспроизведения профилей с углами подъема до 90° применяются однокоординатные следящие приводы с автоматически регулируемой задающей подачей.
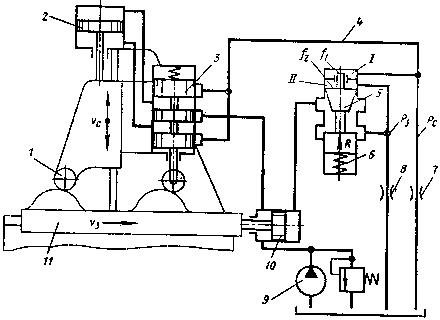
Схема следящего привода с автоматическим регулированием задающей скорости специальным регулятором разработана Б. Л. Коробочкиным [13].
Рис. 15, Схема однокоординатного следящего привода с автоматическим гулированием задающей скорости
В этом приводе (рис. 15) вертикальное следящее перемещение рабочего органа, несущего инструмент Д осуществляет цилиндр 2, который управляется четырехщелевым золотником 3, В силовой магистрали 4, соединяющей крайние щели золотника, установлен дроссель 7 для регулирования скорости слежения. Золотник 3 выполнен таким образом, что в среднем положении все четыре рабочие щели его имеют нулевое открытие, т. е. кромки плунжера золотника и окон в корпусе совпадают. Продольное задающее перемещение стола 11 осуществляет цилиндр 10, у которого при перемещении стола слева направо (на схеме) левая полость соединена с нагнетательной магистралью насоса 9, а правая, через автоматический регулятор скорости 5 и дроссель 8 регулирования скорости задания, с баком. Регулятор скорости имеет плунжер, на нижний конец которого действует пружина 6. Верхний конец плунжера регулятора имеет ступенчатую форму, причем на центральную часть его меньшего диаметра в полости / действует давление, которое устанавливается перед дросселем 7 скорости слежения, а на кольцевую часть в полости // действует давление, которое устанавливается перед дросселем 8 скорости задания. Так как пружина регулятора уравновешивает силы, действующие на ступенчатый плунжер, то при некоторых допущениях, приближенно можно полагать, что сумма сил, развиваемых в полостях І и ІІ постоянна и определяется силой пружины последнего:
 (4)
(4)
где рс — давление перед дросселем 7 скорости слежения; р3 — давление перед дросселем 8 скорости задания; f 1и f 2 — площади ступенчатого плунжера соответственно в полостях / и // регулятора; R— сила пружины 6 регулятора.
При обводе какого-либо профиля вытесняемое из цилиндров 2 и 10 скорости слежения и скорости задания масло проходит через дроссели 7 и 8.
Для дросселей типа диафрагмы квадратичный закон истечения определяется соотношением
 (5)
(5)
где Sдр — площадь проходного сечения дросселя;  др — коэффициент расхода; р — плотность;
др — коэффициент расхода; р — плотность;  р др — перепад давления на дросселе.
р др — перепад давления на дросселе.
Давление рс и р3 перед дросселями и в полостях / и // регулятора будут пропорциональны приблизительно квадратам расходов в них масла, т. е.
 (6)
(6)
где Qc, Q3 — расходы соответственно через дроссели 7 и 8 регулирования следящей и задающей скоростей; Sc, S3 — площади проходных сечений дросселей 7 и 8; с, з — коэффициенты расходов в дросселях 7 и 8.
При

где υс, υ 3 — соответственно скорости слежения и задания; Fc, F3 — площади поршней соответствующих цилиндров, совместное решение уравнений (4) и (6) дает
 (7)
(7)
где
 (8)
(8)
наибольшие величины скоростей слежения и задания при обводе контуров с углом β наклона соответственно 90° и 0° (см. рис. 1).
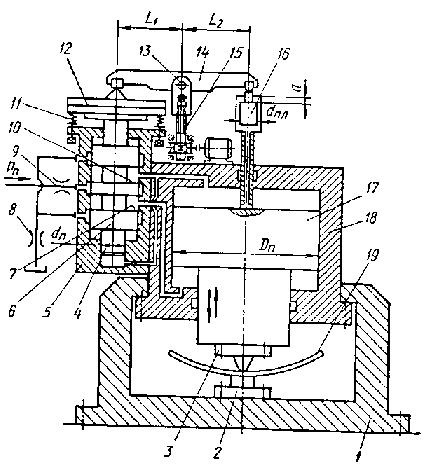
Рис. 16. Схема вибрационного доводочного пресса модели ГДП-16
При равенстве наибольших скоростей слежения и задания, которое достигается выбором соответствующих размеров площадей дросселей, плунжеров и цилиндров, соотношение (7) приобретает вид
 (9)
(9)
Таким образом, в результате действия регулятора сумма квадратов скоростей слежения и задания может быть постоянной (кривая на рис. 14, в), а следовательно, будет постоянной скорость копирования независимо от угла наклона копируемого профиля. Может быть получен эллиптический закон изменения скорости копирования. Величина скорости копирования определяется проходными сечениями дросселей 7 и 8. Исследования, выполненные Б. Л. Коробочкиным, показали, что параметры регулятора скорости задания существенно влияют на работу привода скорости слежения [13].
Рассмотренный следящий привод применяется в токарно-копировальных полуавтоматах, выпускаемых московским станкостроительным заводом им. С. Орджоникидзе и др. Применяются также другие типы следящих приводов с автоматической регулировкой скорости задания.
Рассмотренные гидравлические приводы при исключительной простоте конструкции позволяют осуществить широкие технологические возможности оснащенного ими оборудования, в ряде случаев практически недоступные для приводов других видов (электрических, пневматических). Примером может служить гидропривод вибрационного доводочного пресса модели ГДП-16, построенный на основе однокаскадного гидравлического копировального следящего привода и разработанный А. И. Махряевым.
Гидромеханическая часть пресса состоит (рис. 16) из станины 1, рабочего цилиндра 18, закрепленного в станине, вибратора 5, корпус которого закреплен на рабочем цилиндре, и рычага обратной связи 14. Рабочий цилиндр имеет поршень 17 с двумя штоками. На нижнем силовом штоке закрепляется верхняя часть инструмента 3 (боек). Нижняя часть инструмента 2 (наковальня) крепится в станине /. Верхний шток упирается через промежуточный плунжер 16 в рычаг обратной связи 14, который имеет опору 13, устанавливаемую или перемещаемую в вертикальном направлении винтом 15 {задающим устройством). Вибратор 5 включает четырехщелевой золотник 6, верхняя часть которого упирается в рычаг обратной связи 14 и несет грузы 12, подпружиненные пружинами //.
Пресс работает следующим образом. В исходном положении рычаг обратной связи 14 винтом 15 отведен в крайнее верхнее положение. При этом поршень 17 также занимает крайнее верхнее положение, упираясь в крышку рабочего цилиндра; производится установка заготовки. При перемещении вниз опоры 13 рычага обратной связи 14 происходит замыкание верхнего штока поршня 17 через плунжер 16 на управляющий золотник 6 и опускание последнего. При переходе через среднее положение и открытии щелей 7 и 10 начинается движение вниз поршня 17. Вследствие этого с помощью рычага 14 перемещается вверх золотник 6 вплоть до перехода его через среднее положение, при котором изменяется направление движения поршня 17. В результате устанавливаются устойчивые автоколебания управляющего золотника 6 и соответственно изменение давления в полостях цилиндра 18.
Следовательно, этот гидропривод имеет двухконтурную схему построения с осуществлением обратной связи: при движении золотника от крайнего верхнего до среднего положения от рабочего поршня 17 (внешний контур перемещения центра колебании) и при движении золотника от среднего положения вниз и далее oт крайнего нижнего до крайнего верхнего положения от поршня 4 (внутренний автоколебательный контур). Переключение обратной связи с внешнего на внутренний контур осуществляется плунжером 16.
16 При замыкании внешнего контура существует жесткая связь между опорным буртом плунжера и крышкой штока, при замыкании внутреннего контура образуется зазор а; автоколебания внутреннего контура достигаются выбором соответствующих параметров золотника 6, поршня 4 и массы грузов 12. При соприкосновении инструмента 3 с деталью 19 происходит ее деформирование пульсирующей рабочей силой, которая создается колебанием давлений в полостях цилиндра 18. По окончании деформирования с помощью устройства 15 установка становится в исходное положение. Величины рабочей силы и обжатия регулируются устройством 15 и подводимым давлением р п.
Частота и амплитуда автоколебаний регулируются изменением массы грузов 12, дросселями 8 и 9 и жесткостью пружин //. Гидропривод обеспечивает резкое снижение шума и передачи вибрации на руки рабочего.