Для механических ступенчатых коробок передач используют ис-
полнительные механизмы, реализующие двух- или одноэтапный
процессы переключения. В Японии, например, фирма «Исузи» раз-
работала микропроцессорную систему управления NAVI-5, кото-
рая устанавливается по заказу на пятиступенчатую коробку пере-
дач автомобиля «АСКА». Система (рис. 49.3) обеспечивает двух-
этажный процесс переключения. В исполнительном механизме пере-
ключения используется давление жидкости для работы гидроци-
линдров, перемещающих ползуны с вилками переключения пе-
редач. Для этого автомобиль оборудован гидронасосным агрегатом.
Жидкость по гидромагистралям к исполнительным гидроцилинд-
рам распределяют электромагнитные клапаны. В комплект испол-
нительных гидроцилиндров входят гидроцилиндр привода сцеп-
ления ГЦС, гидроцилиндр избирателя передач ГЦИдля выполне-
ния первого этапа процесса переключения и гидроцилиндр вклю-
чения требуемой передачи ГЦВ.
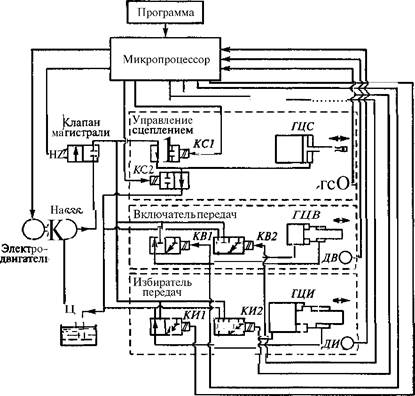 Рис. 49.3. Схема управления комплексом исполнительных механизмов ДЛк
автоматического управленияпереключением передач: ГЦС — гидроцилиндр привода сцепления; ГЦВ — гидроцилиндр включения пе- редачи; ГЦИ — гидроцилиндр избирателя передач; КС1, КС2, KB], КВ2, КИ1 й КИ2— клапаны; ДС, ДВ и ДИ — датчики
Рис. 49.3. Схема управления комплексом исполнительных механизмов ДЛк
автоматического управленияпереключением передач: ГЦС — гидроцилиндр привода сцепления; ГЦВ — гидроцилиндр включения пе- редачи; ГЦИ — гидроцилиндр избирателя передач; КС1, КС2, KB], КВ2, КИ1 й КИ2— клапаны; ДС, ДВ и ДИ — датчики
|
Для управления приводом сцепления служат два электромагнит-
ных клапана: клапан КС1 — для передачи давления в исполнитель-
ный гидроцилиндр; клапан КС2 — для слива жидкости из гидроци-
линдра при возврате вилки выключения сцепления в исходное со-
стояние под действием силы возвратной пружины. Гидроцилиндры
выбора и включения передач управляются клапанами КВ1, КВ2, КИ1
и К И2. С помощью этих клапанов обеспечивается подача жидкости в
предпоршневую и запоршневую полости гидроцилиндров для дву-
стороннего перемещения под давлением поршней со штоками, свя-
занными с ползунами коробки передач. Каждый гидроцилиндр ос-
нащен датчиком (ДС, ДВ и ДИ) для передачи в микропроцессор
сигналов о достижении штоками конечных положений.
В Центральном научно-исследовательском автомобильном и
автомоторном институте (НАМИ) разработан исполнительный
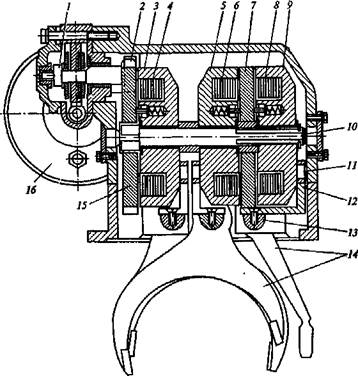 Рис. 49.4. Электромеханический исполнительный механизм переклю- чения передач (разработка НАМИ): 1 — редуктор; 2 и 15 — Шестерни; 3, 5и 9— муфты; 4, 6ш 8— обмотки электро- магнитов;7 — диск; 10 — ведущий вал; // — палец; 12— пластина; 13— ползун;
14 — вилки; 16 — электродвигатель
Рис. 49.4. Электромеханический исполнительный механизм переклю- чения передач (разработка НАМИ): 1 — редуктор; 2 и 15 — Шестерни; 3, 5и 9— муфты; 4, 6ш 8— обмотки электро- магнитов;7 — диск; 10 — ведущий вал; // — палец; 12— пластина; 13— ползун;
14 — вилки; 16 — электродвигатель
|
механизм для одноэтапного процесса переключения: операции из-
бирания и включения совмещены. Кроме уменьшения продолжи-
тельности процесса упрощается система управления. В исполни-
тельном механизме переключения используются электродвигатель
и три электромагнитные муфты (рис. 49.4).
Исполнительный механизм смонтирован на крышке картера
коробки передач, а не на крышке с устройством для ручного пе-
реключения. На корпусе расположен электродвигатель 16 посто-
янного тока, приводящий во вращение червячный вал двухсту-
пенчатого редуктора 1. Его вторая ступень состоит из пары шесте-
рен 2 и 75. Ведомая шестерня обеспечивает привод ведущего вала 10.
На этом валу установлен диск 7, являющийся ведущим элемен-
том электромагнитных муфт 5 и 9. В качестве ведущего диска муф-
ты 3 используется шестерня 15.
Внутри магнитопроводов муфт размещены обмотки возбужде-
ния 4, 6 и <Y и гнезда с пружинами и толкателями для ускорения
выключения муфт при обесточивании обмоток возбуждения. На
корпусах муфт установлены пальцы 11, входящие в паз пластин 12.
Эти пластины связаны с ползунами 13 вилок 14 переключения
передач.
На корпусе смонтированы микровыключатели, фиксирующие
нейтральное положение ползунов и каждую из включенных пе-
редач. В нейтральное положение ползуны устанавливаются воз-
вратными пружинами (микровыключатели и пружины на рис. 49.4
не показаны).
При работе исполнительного механизма электродвигатель че-
рез редуктор вращает вал с диском 7. Командный сигнал включе-
ния той или иной передачи через электронный управляющий блок
подается на обмотку возбуждения одной из электромагнитных муфт.
При этом к соответствующими поверхностям диска 7 или шестер-
ни 15 притягивается корпус муфты 3, 5 или 9 и под действием сил
трения поворачивается. Через палец 11 корпус перемещает плас-
тину 12 и вместе с ней ползун 13 с вилкой 14 — включается за-
данная передача. После включения передачи соответствующим мик-
ровыключателем отключается электродвигатель, но электромаг-
нитная муфта остается включенной. Исполнительный механизм
необратимый, поскольку первая ступень редуктора — червячная
передача. Возвратные пружины не могут переместить ползуны в
нейтральное положение. Для установки коробки передач в нейт-
ральное положение необходимо выключить питание электромаг-
нитных муфт.
Управление подвеской
Автоматизация управления подвеской позволяет повысить не
только комфортабельность салона автомобиля дня водителя и пас-
сажиров, но и безопасность движения. Это достигается введением в
подвеску исполнительных механизмов, управляемых с помощью
электронных устройств, которые изменяют жесткость упругих эле-
ментов и сопротивление амортизаторов. Этим удается уменьшить
крен кузова на повороте и его продольный наклон при разгоне и
торможении. Разработаны устройства, обеспечивающие горизон-
тальное положение кузова при движении по неровным дорогам.
Подвеску с автоматически обеспечиваемыми жесткостными ха-
рактеристиками целесообразно использовать на легковых автомо-
билях высшего класса, автобусах, автомобилях «скорой помощи»
и на автомобилях для перевозки грузов, не выдерживающих зна-
чительных вертикальныхускорений.
Повышение комфортабельности достигается при движении по
дорожным неровностям с ограниченной скоростью путем умень-
шения жесткости подвески. На хороших дорогах при большой ско-
рости движения целесообразно увеличение жесткости подвески
для уменьшения крена кузова.
Автоматически управляемые подвески позволяют регулировать
высоту кузова автомобиля. Это важное свойство, так как высота
кузова при изменении нагрузки на автомобиль влияет на безопас-
ность движения. Стабилизируется также положение оптической оси
световых лучей фар. При движении по плохим дорогам уменьшает-
ся вероятность удара нижними выступающими частями кузова о
дорожные неровности, т.е. улучшается проходимость автомобиля.
Положение кузова по высоте регулируется пневматическими
упругими элементами. Сопротивление амортизаторов регулирует-
ся путем изменения проходного сечения отверстий, через кото-
рые жидкость из надпоршневой полости перетекает в подпорш-
невую, поскольку сопротивление амортизаторов зависит от ско-
рости перемещения поршня.
Управление жесткостью подвески реализуется в основном в
пневматических или гидропневматических подвесках, но в боль-
шинстве случаев эту функцию вводят в комплексе с системой
управления высотой кузова и сопротивлением амортизаторов, так
как используются одни и те же датчики и исполнительные уст-
ройства (рис. 49.5).
Датчик 3 перемещения кузова устанавливается на шасси па-
раллельно амортизатору. При изменении высоты кузова рычаг 6
датчика, связанный тягой 7с рычагом 8 подвески, поворачивает-
ся вверх или вниз. Внутри корпуса датчика 3 размещаются свето- и
фотодиод (оптопара), между которыми расположен обтюратор
(зубчатый диск), поворачивающийся рычагом 6. Фактически та-
кое устройство представляет собой фотоэлектрический прерыва-
тель, вырабатывающий пачки импульсов. Число импульсов в пач-
ке соответствует амплитуде перемещения кузова.
Сигнал датчика является информационным для бортового ком-
пьютера 1, управляющего исполнительным механизмом регули-
рования сопротивления амортизатора и давления в упругом пнев-
моэлементе 2 подвески. Упругий пневмоэлемент подкачивается с
помощью компрессора 5, привод которого выполнен на базе элек-
тродвигателя 4.
Рассмотрим принцип регулирования сопротивления амортиза-
тора, жесткости подвески и высоты кузова на примере одного
колеса (рис. 49.6). Упругий элемент расположен между кузовом 17
автомобиля и нижним рычагом подвески. Параллельно пружи-
не Ц подвески установлена основная пневмокамера 10, внутри
которой (иногда вне ее) находится амортизатор 12. В кузове, выше
основной пневмокамеры, расположена вспомогательная камера 18.
Обе камеры соединены между собой перепускным клапаном, про-
ходное сечение которого регулируется электромагнитным клапа-
Вахлэмпп
а
3 6 7 8

|
Рис. 49.5. Установка элементов управления подвеской в автомобиле (а) и
изменение позиции привода датчика при деформации упругих элемен-
тов подвески и перемещении кузова вверх (б) и вниз (в):
1 _ компьютер, 2 — упругий пневмоэлемент (амортизатор), 3—датчик переме-
щения кузова, 4— электродвигатель, 5 — компрессор, 6— рычаг привода датчи-
ка, 7 — тяга, 8 — продольный рычаг подвески, а — угол качания рычага привода
датчика
ном 6. Этот клапан связан с компрессором 8 подпитки камер воз-
духом через влагоотделитель 1 Атмосферный воздух поступает в
компрессор через фильтр 9.
Регулирование жесткости подвески достигается изменением
производительности перепускного клапана, а изменение высоты
кузова осуществляется подкачиванием пневмокамеры от компрес-
сора или выпуском воздуха из нее в атмосферу, что позволяет
растягивать или сжимать основную пневмокамеру 10.
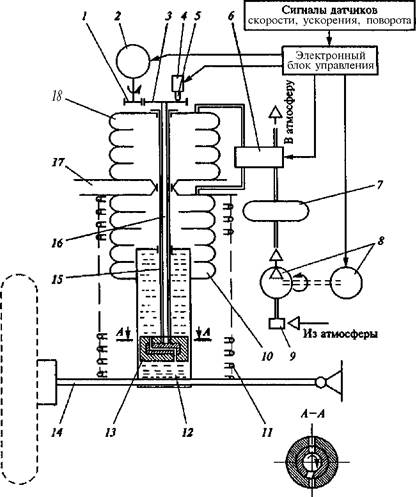 Рис 49 6 Схема автоматического регулированияподвески'1 — зубчатый сектор, 2 — электродвигатель, 3 — шестерня, 4 — электромагнит, 5 — стопор, 6 — электромагнитный клапан, 7 — влагоотделитель, 8 — компрес- сор с приводом, 9 — фильтр, 10 и 18 — пневмокамеры, 11 — пружина, 12 — амортизатор; 13 — поворотный золотник, 14 — нижний рычаг подвески, 15 — полый стержень, 16 — стержень привода поворотного золотника, 17 — кузов
Рис 49 6 Схема автоматического регулированияподвески'1 — зубчатый сектор, 2 — электродвигатель, 3 — шестерня, 4 — электромагнит, 5 — стопор, 6 — электромагнитный клапан, 7 — влагоотделитель, 8 — компрес- сор с приводом, 9 — фильтр, 10 и 18 — пневмокамеры, 11 — пружина, 12 — амортизатор; 13 — поворотный золотник, 14 — нижний рычаг подвески, 15 — полый стержень, 16 — стержень привода поворотного золотника, 17 — кузов
|
Сопротивление амортизаторов регулируется изменением про-
ходного сечения перепускных отверстий в поршне Для этого в
поршень вмонтирован поворотный золотник 13 Золотник пово-
рачивается стержнем 16, соединенным с электродвигателем 2 че-
Без зубчатый сектор 1 и шестерню 3 Стопор 5, управляемый элек-
тромагнитом 4, служит для фиксации сектора в положении, за-
данном электронным блоком управления.