Управление карбюратором
Электронные системы автоматического управления широко
применяют в управлении большинством механизмов и агрегатов
автомобиля: двигателем, трансмиссией, подвеской, рулевым уп-
равлением, а также процессами торможения, предотвращения
столкновений, развертывания средств пассивной защиты.
Применение технических средств автоматического управления
на автомобиле позволяет сократить расход топлива, уменьшить
токсичность отработавших газов и тем самым улучшить экологи-
ческую обстановку, особенно в крупных городах. Автоматика со-
здает условия для повышения эффективности использования ав-
томобилей за счет увеличения их скорости и пропускной способ-
ности дорог при сохранении требований к безопасности движе-
ния и улучшает условия труда водителей.
Электронные автоматические системы управления двигателем
оптимизируют на бензиновом двигателе рабочие процессы топ-
ливоподачи и воспламенения рабочей смеси, облегчают пуск дви-
гателя, особенно при низких температурах.
Расширяется использование автоматики в управлении клапа-
нами для изменения фаз газораспределения или для выключения
из работы нескольких цилиндров в целях экономии топлива. Ис-
пользуют системы, обеспечивающие возврат (рециркуляцию) ча-
сти отработавших газов во впускной трубопровод для смешивания
с вновь поступившей порцией топлива, при этом изменяются не
только состав, но и температура топливной смеси.
Системы топливоподачи бензиновых двигателей подразделяют
на две основные группы:
карбюраторные системы с электронным управлением, в кото-
рых подачей топлива управляют путем изменения проходного се-
чения главного топливного жиклера;
системы впрыска топлива во впускной трубопровод или непос-
редственно в цилиндр двигателя (непосредственный впрыск в ци-
линдр из-за сложности реализации практически не применяют).
Электронное управление карбюратором на современных авто-
мобилях предусматривает в основном управление экономайзером
принудительного холостого хода ЭПХХ (рис. 48.1). Это объясняет-
ся тем, что у автомобиля, особенно в городских условиях, часто
используется режим движения накатом без отключения двигателя
от трансмиссии.
Дроссельная заслонка карбюра-
тора закрыта, и в это время дви-
жущей силой является сила инер-
ции автомобиля, которая через
колеса и трансмиссию подкручи-
вает коленчатый вал двигателя.
Причем частота вращения может
быть выше, чем задаваемая поло-
жением органа топливоподачи, и
двигатель вынужден работать в ре-
жиме торможения — принудитель-
ного холостого хода. Для уменьше-
ния расхода топлива в режиме при-
нудительного холостого хода пре-
кращают подачу топлива, тем самым не только экономя
бензина, но и на 15... 30 % снижая содержание токсичных веществ
в отработавших газах.
Итак, электронный блок управления исполнительным механиз-
мом, закрывающим подачу топлива в режиме принудительного
холостого хода, формирует управляющую команду на основе ана-
лиза выполнения двух условий: дроссельная заслонка карбюратора
закрыта; текущая частота вращения п коленчатого вала двигателя
больше частоты /?х х, которую имел бы двигатель, работая с закры-
той дроссельной заслонкой при отключении от трансмиссии (ко-
робка передач в нейтральной позиции), т. е. п > пх х. Значение часто-
ты вращения пх х для каждой конкретной модели двигателя должно
быть предварительно занесено в память микропроцессора системы
управления экономайзером принудительного холостого хода.
Информация о частоте вращения коленчатого вала двигателя
формируется путем измерения частоты замыканий контактов пре-
рывателя. Положение дроссельной заслонки карбюратора фиксиру-
ется с помощью кнопочного (конечного) выключателя (микровык-
лючателя), приводимого в действие кулачком, механически связан-
ным с приводом дроссельной заслонки. Такая схема управления при-
менена на автомобилях ЗИЛ с карбюраторными двигателями.
На легковых автомобилях устанавливают два клапана. Один из
них, управляющий проходным сечением канала холостого хода,
имеет вакуумный привод. Второй, соединяющий вакуумную ка-
меру этого привода с впускным коллектором двигателя, — элек-
тромагнитный. Двухклапанная схема управления применена на
автомобилях ВАЗ-2108.
Управление впрыском топлива
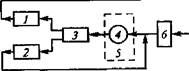 Рис. 48.1. Система автоматическо- го управления экономайзером принудительного холостого хода: / — датчик частоты вращения вала, 2 — датчик положения дросселя, 3 — двигатель, 4 — электромагнитный клапан; 5 — карбюратор, 6 — блок управления ЭПХХ
Рис. 48.1. Система автоматическо- го управления экономайзером принудительного холостого хода: / — датчик частоты вращения вала, 2 — датчик положения дросселя, 3 — двигатель, 4 — электромагнитный клапан; 5 — карбюратор, 6 — блок управления ЭПХХ
|
Системы впрыска топлива для бензиновых двигателей подраз-
деляют на две группы:
системы распределенного впрыска, когда форсунки устанавли-
вают в зоне впускных клапанов каждого цилиндра;
системы центрального впрыска, когда имеется одна (реже две)
форсунка на весь двигатель, и подача (впрыск) топлива осуще-
ствляется (аналогично карбюратору) в одном месте впускного
трубопровода; в этой зоне формируется смесительная камера, а
из нее топливная смесь распределяется на тактах всасывания по
каждому цилиндру в порядке их работы.
Система с электронным впрыском дозирует подачу топлива в
зависимости от режима работы двигателя. Д 1т этого топливо пода-
ется к форсункам от насоса при постоянном давлении (0,2 МПа).
Электронная система управления формирует для форсунок ко-
мандный сигнал прямоугольной формы определенной длитель-
ности, который определяет время открытого состояния форсу-
нок, или, иначе говоря, количество топлива, поступающего в
цилиндры двигателя. Управление длительностью, т.е. шириной пря-
моугольного импульса, принято называть широтно-импулъснойм°-
дуляцией (ШИМ). Процесс формирования импульсов переменной
длительности (ширины) и частоты относят к частотно-широтно-
импульсной модуляции (ЧШИМ).

| Рис. 48.2. Система электронноговпрыска топлива:
|
| 1 — преобразователь кода; 2 — устройство синхронизации; 3 — усилительмощ-ности; 4 — форсунки; Др, /ж, /в и PaTM — датчики соответственно частоты вращения коленчатого вала двигателя, угла открытия дроссельной заслонки кар- бюратора, температуры охлаждающей жидкости и атмосферного воздуха, а также
атмосферного давления
|
В систему электронного управления впрыском топлива входят
(рис. 48.2) датчик пе частоты вращения коленчатого вала двигате-
ля, датчик угла открытия дроссельной заслонки карбюратора,
двухканальный преобразователь АЦП, постоянное запоминающее
устройство ПЗУ, преобразователь / кода во временные интерва-
лы, устройство 2 синхронизации, усилитель 3 мощности, от ко-
торого сигнал поступает в электромагниты форсунок 4. Сигнала-
ми датчиков температуры охлаждающей жидкости двигателя /
атмосферного воздуха tB и атмосферного давления раш проводится
дополнительная корректировка временного интервала открытого
состояния форсунок.
С помощью устройства 2 синхронизации, управляемого от дат-
чика частоты вращения коленчатого вала двигателя, обеспечивает-
ся впрыск топлива в моменты, когда поршень находится в опреде-
ленной позиции такта всасывания, соответствующей наименьше-
му оседанию частиц топлива на стенках впускного трубопровода.
Такай система периодического впрыска топлива имеет хоро-
шее быстродействие и более точно дозирует топливо при неуста-
новившихся режимах работы двигателя. Благодаря точности дози-
ровки уменьшаются по сравнению с любыми другими системами
топливоподачи расход бензина и токсичность отработавших газов.
Блок управления системой впрыска строится на базе мощного
микропроцессора, получающего информацию от множества дат-
чиков, отслеживающих параметры рабочего процесса двигателя.
По существу, это система комплексного регулирования впрыска
топлива, угла опережения зажигания, детонации и частоты вра-
щения коленчатого вала на холостом ходу.
В большинстве систем электронного впрыска используется син-
хронный режим, т. е. на один оборот коленчатого вала двигателя —
один впрыск. На разгонном режиме для повышения мощности дви-
гателя используется не только синхронный, но и асинхронный
впрыск. Как карбюраторные системы с электронным управлени-
ем, так и системы впрыска топлива предусматривают наличие на
автомобиле электронной системы зажигания с цифровым управ-
лением утлом опережения зажигания.
Выбор оптимального угла опережения зажигания зависит от час-
тоты вращения коленчатого вала двигателя и его температуры, от
позиции органа привода топливоподачи, разрежения во впускном
трубопроводе и др. Взаимосвязь влияния этих параметров на угол
опережения зажигания нелинейная и зависит от быстроходности
двигателя, его степени сжатия и эксплуатационного износа. Она не
может быть какой-либо закономерностью, описываемой математи-
ческим выражением. Поэтому микропроцессорные системы зажига-
ния содержат постоянное запоминающее устройство, в память кото-
рого заносятся данные об угле опережения, а выбор (считывание из
памяти) оптимального текущего угла происходит на основании дан-
ных о других параметрах рабочего процесса двигателя.
Примером такой базы данных, записываемых в ПЗУ," является
калибровочная диаграмма (см. рис. 45.10). В микропроцессорной си-
стеме управления углом опережения зажигания применяют про-
граммируемые микросхемы процессоров, позволяющие при из-
менении алгоритма работы системы не менять аппаратную часть,
а только перепрограммировать ПЗУ (вводить в ПЗУ новые дан-
ные). Это необходимо выполнять также при изменении парамет-
ров двигателя в результате его старения, что требует высокой ква-
лификации специалистов автопредприятий, выполняющих тех-
ническое обслуживание автомобилей
Перспективными считаются системы оптимального управления
топливоподачей. По существу, в такой системе реализуется прин-
цип работы следящей системы автоматического управления с об-
ратной связью. В процессе управления контролируется результат
воздействия управляющих сигналов и, если результат отклоняет-
ся от требуемого значения параметра, управляющее воздействие
корректируется (это делается непрерывно до ввода системы в тре-
буемый оптимальный режим).
Как и в любой следящей системе, процесс управления носит
колебательный характер. Практически из трех желаемых парамет-
ров (тяговые характеристики автомобиля, расход топлива, токсич-
ность отработавших газов) оптимизировать можно только один. Так,
для улучшения тягово-скоростной характеристики увеличивают
топливоподачу (обогащают рабочую смесь), в то время как для
уменьшения расхода топлива требуется обеднение рабочей смеси.
Токсичность отработавших газов уменьшается приготовлением
рабочей смеси в определенном соотношении ее химических со-
ставляющих.
Попыткой удовлетворить современные требования к экологи-
ческим характеристикам автомобилей является внедрение про-
граммно-адаптивных систем топливоподачи, когда обратная связь
осуществляется путем контроля химического состава отработав-
ших газов (рис. 48.3).
 Рис. 48.3. Следящая система авто- матического регулирования топ- ливоподачи: 1 — дозирующее устройство; 2—дви- гатель; 3 — выпускной тракт; 4— дат- чик кислорода, 5 — нейтрализатор; 6— схема сравнения; 7 — задатчик опорною напряжения
Рис. 48.3. Следящая система авто- матического регулирования топ- ливоподачи: 1 — дозирующее устройство; 2—дви- гатель; 3 — выпускной тракт; 4— дат- чик кислорода, 5 — нейтрализатор; 6— схема сравнения; 7 — задатчик опорною напряжения
|
Дозирующее устройство J двигателя 2 приготавливает рабочую
смесь, в которой обеспечивается ее стехиометрйческий состав. Если
состав смеси отличается от требуемого, то датчик 4 кислорода,
установленный в выпускном тракте J двигателя 2, вырабатывает
соответствующий электрический сигнал, который подается в элек-
тронную схему 6 сравнения. В эту же схему поступает сигнал от
задатчика 7 опорного напряжения, соответствующего тому, кото-
рое должен формировать датчик 4
кислорода, если состав отработав-
ших газов соответствует по ток-
сичноститребуемымнормативам.
В противном случае схема срав-
нения вырабатывает сигнал рас-
согласования, отличный от нуля,
которым корректируется работа
дозирующего устройства. Оконча-
тельная очистка отработавших
газов от таких составляющих, как
СО, СН, N0, производится ка-
талитическим нейтрализатором 5.
С помощью датчиков температу-
ры и давления корректируется
длительность управляющего им-
2 3 4 5 6 7 8
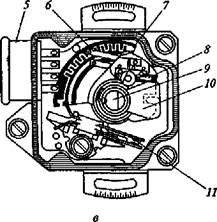
 Рис.48 4. Электронная системауправлен ия двигателем фирмы «Тойота»: 1 — замок зажигания, 2 — электронный микропроцессорный блокуйравления, 3 — воздушный фильтр; 4—датчик температуры поступающего вдвшатель воз- духа; 5—датчик расхода воздуха; 6— регулятор давления; 7 — клапанхолостогсхода; 8 — форсунка холодного пуска; 9 — датчик углаоткрытия дроссельнойзаслонки, 10 — редукционный клапан; 11 — форсунка; 12 — топливный фильтр 13 — топливный насос; 14 — топливный бак; 15 — таймер прогрева; 16 — датчик детонации, 77—датчик температуры в системе охлаждения, 18— дагчик паде-ния давления масла; 19 — датчик кислорода; 20 — катушказажигания, 21 — распределитель зажигания; 22— реле включения; 2J —да~4йк скорости
Рис.48 4. Электронная системауправлен ия двигателем фирмы «Тойота»: 1 — замок зажигания, 2 — электронный микропроцессорный блокуйравления, 3 — воздушный фильтр; 4—датчик температуры поступающего вдвшатель воз- духа; 5—датчик расхода воздуха; 6— регулятор давления; 7 — клапанхолостогсхода; 8 — форсунка холодного пуска; 9 — датчик углаоткрытия дроссельнойзаслонки, 10 — редукционный клапан; 11 — форсунка; 12 — топливный фильтр 13 — топливный насос; 14 — топливный бак; 15 — таймер прогрева; 16 — датчик детонации, 77—датчик температуры в системе охлаждения, 18— дагчик паде-ния давления масла; 19 — датчик кислорода; 20 — катушказажигания, 21 — распределитель зажигания; 22— реле включения; 2J —да~4йк скорости
|
пульса дозирования топлива. Пример электронной системы впрыс-
ка, реализованной на автомобиле «Тойота», показан на рис. 48.4.
Топливо из бака 14с помощью насоса 13, управляемого от реле 22
включения, через фильтр 12 подается к форсунке И впрыска во
впускной трубопровод. Форсунка оснащена регулятором давления 6
и редукционным клапаном 10. Перед впускным трубопроводом
установлен воздушный фильтр 3, за которым расположен дат-
чик 4 температуры поступающего в двигатель воздуха и датчик 5
расхода воздуха. С приводом дроссельной заслонки связан датчик 9
угла ее поворота (открытия).
Центральный электронный блок 2 управления подключен к
бортовой сети напряжением 12 В через замок / зажигания. На вход
электронного блока 2 управления подается сигнал скорости дви-
жения автомобиля. Выходы блока управления связаны с форсун-
кой 11 и катушкой зажигания 20. На входы блока 2 подаются сиг-
налы датчиков частоты вращения коленчатого вала от распреде-
лителя 21, температуры охлаждающей жидкости 17, кислорода 19
и аварийного падения давления масла 18. Для облегчения пуска
холодного двигателя используется форсунка 8. Устойчивость ре-
жима холостого хода обеспечивается клапаном 7.
В рассматриваемой комплексной системе управления обеспечи-
вается не только топливоподача, но и регулирование угла опереже-
ния зажигания с учетом карты оптимальных углов (см. рис. 45.10)
и под контролем возможности возникновения детонации, инфор-
мация о которой формируется датчиком 16(см. рис. 48.4). Удержи-
вание угла опережения зажигания на границе предельного, за
которым происходит детонация, способствует повышению КПД,
мощности и экономичности двигателя.
Дополнительная корректировка угла опережения зажигания
осуществляется по сигналам датчика температуры двигателя, что
важно при его холодном пуске. При повышении температуры
двигателя зажигание автоматически устанавливается более по-
здним.
В электронных микропроцессорных блоках управления предус-
матриваются вспомогательные подсистемы, обеспечивающие ди-
агностику правильности функционирования системы впрыска.
48.3. Управление топливоподачей дизелей
Электронные системы управления топливоподачей дизелей
используют для снижения токсичности идымности отработавших
газов, акустических излучений, а также для стабилизации работы
двигателя на холостом ходу. Они выполняют следующие функции:
количественное управление топливоподачей;
управление моментом начала впрыска;
управление частотой вращения коленчатого вала на холостом ходу
и защитой двигателя от превышения допустимой частоты;
управление свечами накаливания.
Как и для карбюраторных двигателей, используют три типа
электронных систем управления дизелями: аналоговые, цифровые ж
микропроцессорные. Из-за некоторых специфических недостатков
аналоговые и цифровые системы управления распространены в
основном на стационарных двигателях, работающих в установив-
шихся режимах.
Автомобильные двигатели, которые работают в широком диа-
пазоне скоростных и нагрузочных (неустановившихся) режимов,
требуют комплексного подхода к динамическому процессу управ-
ления на основе большого количества информации о режимных
параметрах и корректирующих операциях, обеспечивающих за-
щиту от аварийных режимов. Под режимными параметрами пони-
мают информацию о частоте вращения коленчатого вала двигате-
Датчики коррекции
—~~I _
Рис. 48.5. Микропроцессорная система управления дизелем:
ПЗУ — постоянное запоминающее устройство; ОЗУ — оперативное запоминаю-
щее устройство, ПЗ — программный задатчик, БС — блок сравнения; ИМ —
исполнительный механизм; ТНВД — топливный насос высокого давления; М—
дизель, W„ — датчик положения педали топливоподачи; Ар — датчик реального
текущего положения рейки топливного насоса, пе — частота вращения коленча-
того вала двигателя; /м и Ри — температура и давление масла; /ж, /т и /в — темпе-
ратура соответственно охлаждающей жидкости, топлива и воздуха; Д1М — атмо-
сферное давление
ля, положении рейки топливного насоса высокого давления, по-
ложении педали топливоподачи.
Микропроцессор на основе информации о режимных параметрах
формирует предварительные коды для исполнительных механиз-
мов, которыми задается режим работы двигателя. Повышение точ-
ности регулирования достигается путем корректировки управляю-
щих воздействий на основе информации об условиях работы двига-
теля, т. е. о температуре топлива и всасываемого воздуха при атмо-
сферном давлении. Корректировка проводится для дозы впрыски-
ваемого топлива. Сигналы датчиков температуры и давления мас-
ла, температуры охлаждающей жидкости используются для оценки
условий пуска двигателя и предупреждения аварийных режимов.
Микропроцессорная система управления дизелем М (рис. 48.5),
обеспечивающая удовлетворительное воспроизведение режимов
работы, близких к оптимальным, представляет собой программ-
но следящую систему автоматического регулирования с несколь-
кими отрицательными обратными связями. Качественное обеспе-
чение переходных процессов на неустановившихся режимах, свя-
?анное с технико-экономическими показателями работы двигате-
ля, зависит от характеристик топливоподачи.
24 Ва*ламоа
Рабочий процесс электронной системы управления сводится к
расчету теоретически необходимого положения рейки ТНВД. Эту
операцию выполняет программный задатчик ПЗ микропроцессора,
используя информацию датчика Wn о положении педали топливо-
подачи.
Изменение реального текущего положения рейки осуществляет-
ся датчиком Хр. Сравнение расчетного и действительного положений
рейки проводится в блоке сравнения БС, и в зависимости от рассо-
гласования входных параметров осуществляется корректировка по-
ложения рейки с помощью исполнительного механизма ИМ.
В оперативном запоминающем устройстве ОЗУ микропроцес-
сора хранятся промежуточные результаты вычислений. Корректи-
ровка управляющих воздействий ИМ проводится при опросе ком-
мутатором датчиков температуры воздуха и топлива. Для управле-
ния углом опережения впрыска топлива в зависимости от частоты
вращения коленчатого вала и нагрузки на двигатель используют
датчики пе и Ратм. Оптимальный угол опережения впрыска выби-
рается (индивидуально для каждого типа двигателя) по регулиро-
вочной характеристике, заложенной в память ПЗУ (см. рис. 45.10).
Микропроцессор получает исходную информацию от датчиков
положения педали топливоподачи, частоты вращения коленчато-
го вала двигателя, текущего положения рейки топливного насо-
са, механически связанного с ТНВД.
Установка требующейся позиции рейки топливного насоса осу-
ществляется следящей системой автоматического управления с об-
ратной связью, в которой задатчиком является электрический сиг-
нал расчетного положения рейки, а обратной связью — сигнал
действительного положения рейки, формируемый датчиком ^.Кор-
ректировка расчетного значения положения рейки выполняется с
учетом данных о температуре двигателя, температуре воздуха, по-
ступающего на вход двигателя, и об атмосферном давлении.
Блок расчета необходимого положения рейки топливного на-
соса содержит (как и в электронной системе управления карбю-
раторным двигателем) запоминающее устройство, в которое за-
носятся данные регулировочной характеристики дизеля по углу
опережения впрыска топлива (см. рис. 45.10).
Это позволяет изменять угол опережения впрыска в зависимо-
сти от нагрузки и частоты вращения коленчатого вала двигателя.
Информация основных датчиков, участвующих в формировании
количественных и временных характеристик топливоподачи, исполь-
зуется дополнительно в подсистеме защиты двигателя, т. е. когда ка-
кой-либо параметр рабочего процесса достигает предельно допусти-
мого значения. Например, при достижении температуры двигателя
105 °С снижается частота вращения коленчатого вала и водитель опо-
вещается звуковым и световым сигналами. При падении давления
масла в системе смазывания двигатель останавливается.
48.4. Информационное обеспечение микропроцессорных
систем управления двигателем
Комплекс датчиков, с помощью которых представляется ис-
ходная информация для электронных систем управления автомо-
билем, состоит из датчиков частоты вращения, линейного и уг-
лового перемещения, температуры, давления (в том числе дето-
нации), расхода воздуха и химического состава газа.
Датчик частоты вращения формирует информацию о частоте
вращений коленчатого вала двигателя и о моментах прохождения
поршнем ВМТ. Применяют датчики индуктивные или основан-
ные на эффекте Холла.
В индуктивном датчике катушку индуктивности, расположен-
ную на магнитном сердечнике, устанавливают в картере махови-
ка двигателя с небольшим зазором относительно зубчатого венца
маховика. При прохождении зубцов венца мимо сердечника ка-
тушки изменяется магнитное сопротивление цепи «магнитный
сердечник — зуб — воздушный зазор», и в катушке индуцируются
импульсы ЭДС, частота которых пропорциональна частоте вра-
щения коленчатого вала двигателя. Датчик Холла, как правило,
устанавливают в распределителе зажигания или используют уже
установленный (в бесконтактных системах зажигания).
Датчики линейного или углового перемещения рейки ТНВД дизе-
ля, угла поворота дроссельной заслонки карбюратора или пере-
мещения педали топливоподачи на рабочем месте водителя при-
меняют аналоговые (реостатные) (рис. 48.6, а) или потенциомет-
рические (рис. 48.6, б), реже индуктивные), а также дискретного
действия (рис. 48.6, в). Внутри корпуса 2 (см. рис. 48.6, а) реостат-
ного (потенциометрического) датчика на изолирующей платфор-
ме расположен дугообразный резистивный элемент 1, по которо-
му перемещается ползунок 4, связанный с валом внешнего при-
вода. С этим же валом связан второй (контактный) ползунок 3,
включающий концевой выключатель в крайнем положении при
закрытой дроссельной заслонке.
В датчике дискретного действия (см. рис. 48.6, в) дугообразная
пластина 7 выполнена в виде ряда последовательно расположен-
ных контактов, по которым перемещается ползунок 6, связанный
с приводом 9. Кулачок 10 привода управляет контактами 8 и 11 в
конечных позициях при повороте вала привода. Весь электриче-
ский узел располагается в корпусе с электрическим разъемом 5
для подключения кабеля связи с электронным блоком.
Датчики для измерения температурного режима двигателя и пе-
редачи информации в электронные блоки управления использу-
ют в основном аналогового типа.
Датчик (рис. 48.7) представляет собой кристалл терморезисто-
ра 1, монтируемый в корпусе 4 изолированно от него с помощью
Рис. 48 6. Датчики угла поворота
дроссельной заслонки:
а — реостатный; б — потенциомет-
рический; в — дискретный; 1 — ре-
зистивный элемент; 2 — корпус;
3, 4 и 6— ползунки; 5 — кабельный
разъем; 7 — контактная пластина; 8
и 11 — контактные группы; 9 —
привод; 10 — кулачок
диэлектрической втулки 5. Терморезистор Прижат к днищу корпу-
са 4 пружиной 2, которая контактирует с выводом 3. При повы-
шении температуры сопротивление терморезистора уменьшает-
ся, что приводит к увеличению проходящего через него тока, ко-
торый является информационным сигналом для электронных бло-
ков управления топливоподачей.
Рис. 48.7, Датчик температуры дви-
гателя с терморезисторным чув-
ствительным элементом:
1 — терморезистор; 2 — пружина; 3 —
вывод; 4 — корпус; 5 — втулка
Датчик давления — также аналогового (непрерывного) дей-
ствия — подобен датчику для измерения давления в системе сма-
зывания двигателя.
Давление воспринимается мембраной, которая перемещает
движок потенциометра (резистивный датчик) или магнитный сер-
дечник внутри катушки индуктивности.
Перспективными считаются датчики, в которых используется
пьезоэффект или пьезорезистивный эффект. В первом случае дав-
ление рабочей среды передается на кристалл из цирконата-тита-
ната свинца, на поверхности которого под действием давления
образуются электрические заряды, пропорциональные давлению.
Во втором случае полупроводниковый кремниевый кристалл вы-
полнен в виде мостовой резистивной схемы (рис. 48.8, а). Под
действием давления пропорционально изменяется сопротивление
резисторов, а следовательно, и сила тока, проходящего через них.
Наиболее сложным по конструкции является датчик давления
воздуха во впускном трубопроводе. Перед дроссельной заслонкой
в трубопроводе давление практически соответствует давлению
наружного (атмосферного) воздуха, а за дроссельной заслонкой в
зависимости от ее позиции все время меняется.
Поскольку число циклов наработки такого датчика невелико,
то для повышения его долговечности используют бесконтактные
индуктивные преобразователи механических перемещений в эле-
ктрический сигнал (рис. 48.8, б).
1 4 5 6 1
 Рис. 48.8. Датчики давления: а — полупроводниковый; б — индуктивный; / — полупроводниковый тензоре- зистор; 2 — фильтр; 3 — мембрана камеры компенсации изменения атмосфер- ного давления; 4— пробка; 5 — анероидная коробка; 6 и 7 — катушки индуктив- ности; 8 — сердечник; 9 — ярмо
Рис. 48.8. Датчики давления: а — полупроводниковый; б — индуктивный; / — полупроводниковый тензоре- зистор; 2 — фильтр; 3 — мембрана камеры компенсации изменения атмосфер- ного давления; 4— пробка; 5 — анероидная коробка; 6 и 7 — катушки индуктив- ности; 8 — сердечник; 9 — ярмо
|
Детонация
есть
Детонации нет

|
Зажигание
Сигнал
зажигания
^ШрШШ
Интервал распознавания
детонации

| Угол опережения зажигания
|
| Рис. 48.9. Датчик детонации: а — конструкция; б— характеристика датчика детонации при постоянной часто- те вращения коленчатого вала двигателя; в — графики обработки сигнала датчи- ка при компьютерном распознавании возникновения детонации; 1 — пьезо- элемент; 2 — мембрана; ивых — выходное напряжение; t — время
|
| Выходнойсигналдатчика детонации
Интенсивность
|
Стандартный уровень амплитуд
для обнаружения
детонации
Давление воздуха воспринимается блоком, состоящим из двух
анероид,ных коробок 5, соединенных последовательно. Поскольку
при увеличении нагрузки давление во впускном трубопроводе воз-
растает, анероидные коробки сжимаются и перемещают связан-
ный с ними сердечник 8 внутри катушек б и 7, установленных в
ярме 9. Сердечник 8, входя в катушку, повышает ее индуктивность,
что вызывает увеличение ширины импульса, открывающего фор-
сунку впрыска топлива. Для того чтобы показания датчика опреде-
лялись только давлением внутри впускного трубопровода, блок
анероидов связан с мембраной 3. Атмосферное давление воздей-
ствует На мембрану с внешней стороны через отверстия в крышке.
Внутренняя полость через отверстия в разделительной перегородке
сообщается с камерой, где располагается анероидный блок.
Датчик детонации (рис. 48.9, а) — это тот же датчик давления
пьезоэлектрического типа, по существу работающий подобно мик-
рофону. Возникновение детонации в цилиндрах двигателя сопро-
вождается колебаниями давления определенной частоты. Колеба-
ния передаются на эластичную мембрану 2 с наклеенным на нее
пьезоэлементом 7. Параметры мембраны выбраны из расчета ре-
зонанса на частоте детонации. При резонансе пьезокристалл вы-
рабатывает электрический потенциал, использующийся как ин-
формация о появлении детонации в двигателе.
При работе двигателя без детонации акустическое воздействие
на датчик и вибрация вызывают появление на выходе датчика сиг-
нала, усредненная амплитуда которого принимается за начало от-
счета (нулевую точку). Возникновение сигнала, амплитуда которо-
го превышает усредненную (принятую за нулевую), свидетельству-
ет о появлении детонации (рис. 48.9, б, в). По числу импульсов в
сигнале датчика, которые превышают усредненную амплитуду до
начала детонации, определяют степень детонации. В зависимости
от степени детонации осуществляют управление зажиганием, а
именно уменьшают угол опережения зажигания. Если после этого
детонация исчезает, то угол опережения вновь постепенно увели-
чивают так, чтобы он был близок к детонационному пределу.
Для создания датчиков расхода воздуха могут быть использова-
ны несколько физических принципов. Например, расход воздуха
измеряют по частоте вращения турбинки, помещенной в движу-
щийся воздушный поток, по углу отклонения (под воздушным на-
пором) свободно поворачивающейся заслонки в трубопроводе или
по перепаду давлений перед дросселем и за ним в трубопроводе.
Наиболее распространен термоанемометрический метод измере-
ния скорости (расхода) воздуха. Принцип действия такого датчика
заключается в том, что если нагретый электрическим током провод-
ник, у которого сопротивление зависит от температуры, поместить
в воздушный поток, то этим потоком проводник будет охлаждаться
и, следовательно, менять свое сопротивление. Изменение сопротив-
Рис. 48.10. Датчик расхода воздуха на базе термоанемометра:
/ — корпус; 2 — электронный модуль; 3 — формирователь воздушного потока;
4— сетка; 5 — платиновая нить; 6— штекерный разъем
ления пропорционально скорости потока. Поэтому по изменению
сопротивления судят о скорости потока, а при известном сечении
трубопровода — и о расходе воздуха через этот трубопровод.
Обычно используют два проводника: один — в среде с движу-
щимся воздушным потоком, другой — в среде с неподвижным
воздухом. Этим компенсируется влияние температуры окружаю-
щей среды (рис. 48.10). Платиновая нить 5 термоанемометра уста-
новлена в корпусе формирователя 3 воздушного потока. Внутрен-
ний объем корпуса защищен сетками 4 для спрямления воздуш-
ного потока и защиты нитей от механических воздействий. Элек-
тронный модуль 2 представляет собой предварительный усили-
тель, ко входу которого по мостовой схеме подключены нити тер-
моанемометрического датчика. Питание усилителя и вывод ин-
формационного сигнала производят через штекерный разъем 6.
К датчикам, реагирующим на химический состав газа (в частности,
на содержание кислорода), относится лямбда-зонд. Чувствительные
элементы датчика выполнены из двуокиси циркония или титана.
Циркониевый датчик представляет собой гальванический эле-
мент с пористыми платиновыми электродами. Промежуток между
электродами заполнен двуокисью циркония, который является
электролитом. Такому гальваническому элементу путем прессова-
ния придается форма колпачка (рис. 48.11). Активный элемент 6
(колпачок) вставлен в металлический корпус 7 и защищен от вне-
шних механических воздействий сетчатым кожухом 7, через кото-
рый отработавшие газы проникают к внешней стороне колпач-
ка 6. Для этого резьбовой частью корпуса 1 датчик ввинчивается в
соответствующее отверстие трубопровода, отводящего отработав-
шие газы. Внутренняя поверхность колпачка соприкасается с ат-
7 6 5 4
Рис. 48.11. Датчик кислорода:
/ и 2 __ соответственно металлический и керамический корпуса; 3 — выходной
кабель; 4 — внешний кожух; 5 — контактный наконечник; — активный эле-
мент (колпачок); 7 — защитный кожух </' прорезями
мосферным воздухом. Отработавшие газы, с одной стороны, и
атмосферный воздух с другой проникают ч&рез пористую СТРУК"
туру платиновых электродов в электролит (Двуокись циркония).
В зависимости от давления кислорода, находящегося в отрабо-
тавших газах (парциального давления), датчик вырабатывает на~
пряжение, соответствующее содержанию кислорода. Такие Датчи~
ки удовлетворительно работают при температуре не ниже 350 °С.
Поскольку рабочая температура циркониевых датчиков высо-
ка, то в режиме прогрева двигателя они никакой информации не
выдают. Иногда для получения информации в этом режиме при-
меняют искусственный электрический подйгрев датчика.
Титановый датчик относится к резисториым приборам- резис-
тор из двуокиси титана, помещенный в выхлопную трубу, меняет
свое сопротивление в зависимости от химического состава отра-
ботавших газов.
Контрольные вопросы
\ _ Расскажите об устройстве управления -экономайзером принудитель-
ного холостого хода карбюратора. Для чего это устройство необходимо?
2. Что дает применение в двигателе системы электронного впрыска
топлива? ^
3. К