При выполнении маневра захода на посадку по малому прямоугольному маршруту необходимо контролировать ширину установленной схемы захода (рис.63).
Контроль ширины прямоугольного маршрута осуществляется в момент пролета траверза ДПРМ сравнением расчетной разности курсовых углов ДПРМ и БПРМ (23°) с фактической разностью.
При стандартном расположении приводных радиостанций расстояние между приводными радиостанциями (5)—3000 м, а ширина прямоугольного маршрута (Ц —7000 м (6950 м).
Тогда КУР определяется по формуле:
tgΔ КУР = S/L,
Расчет КУР производится на навигационной линейке (рис. 64). Если КУР фактический больше 23°, это значит, что самолет уклонился внутрь маршрута, а если КУР фактический меньше 23°, значит, он уклонился во внешнюю сторону.
Линейное уклонение при отличии КУР фактического от расчетного значения в 1° составляет 100 м.
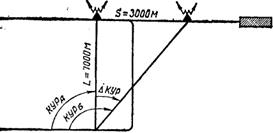
Рис. 63. Контроль ширины прямоугольного маршрута

Рис. 64. Расчет разности курсовых углов ДПРМ и БПРМ
Контроль выполнения четвертого разворота
Точность вывода самолета на предпосадочную прямую во многом зависит:
— от точности расчета элементов построения схемы захода;
— от выдерживания рассчитанных элементов;
— от правильности выполнения четвертого разворота.
При заходе на посадку по ОСП контроль четвертого разворота осуществляется сравнением показаний магнитного компаса и показаний АРК в трех точках (рис. 65):
за 60° до окончания разворота;
за 30° до окончания разворота;
на прямой.
При правильном выполнении четвертого разворота показания должны быть:
в точке 1 (за 60°):
по магнитному компасу 60° до МК посадочного;
по АРК—51° (309°);
в точке 2 (за 30°):
по магнитному компасу 30° до МК посадочного;
по АРК—27° (333°);
в точке 3 (на прямой):
МК=ПМПУ;
КУР=360°.
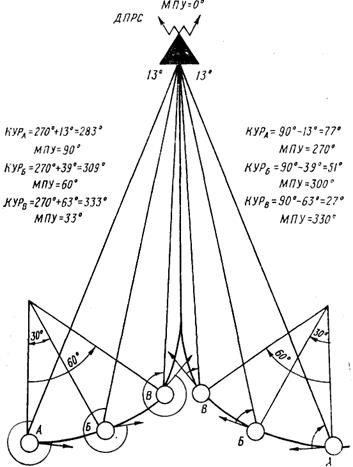
Рис. 65. Точки контроля выполнения четвертого разворота:
А — начало разворота; Б, В — точки контроля в процессе разворота
Развернуть самолет на МКпос с учетом угла сноса. Если в процессе четвертого разворота обнаружены отклонения от данных показаний, необходимо изменением угла крена ликвидировать допущенную ошибку разворота.
Для исправления ошибок необходимо пользоваться следующими правилами:
если стрелка АРК быстрее приближается к нулю («спешит»), чем МК к МКпос, уменьшить крен;
если стрелка АРК медленнее приближается к нулю («отстает»), чем МК к МКпос, увеличить крен.
При заходе на посадку по СП-50М контроль четвертого разворота производится по показаниям стрелок прибора КППМС (рис.66).
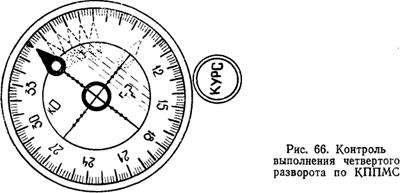
Момент начала четвертого разворота определяется следующими способами:
по расчетному КУР4 по команде диспетчера;
по отшкаливанию стрелки зоны курса КППМС (применяется в случаях невозможности использования двух первых способов).
В процессе четвертого разворота отшкаливание стрелки зоны курса (вертикальной стрелки КППМС) происходит за 35—45° до окончания разворота.
С момента отшкаливания стрелки зоны курса необходимо изменением угла крена удерживать стрелку указателя на верхней части вертикальной стрелки до выхода самолета на ось ВПП.
Если обнаружено, что стрелка указателя курса отстает, увеличить крен, а если опережает вертикальную стрелку — уменьшить крен.
Для вывода самолета на ось ВПП с МКпос=ПМПУ— (±УС) необходимо в процессе разворота удерживать стрелку указателя курса с наветренной стороны относительно вертикальной стрелки на величину УСпос.








