Рассмотрим алгоритм управления электрозадвижкой [65, 66]. Ввиду того, что при реализации программы на контроллере используется и аппаратная часть, то систему управления задвижкой назовём блоком управления задвижкой (БУЗ).
Алгоритм управления задвижкой должен реализовать следующие функции:
1) обеспечивает дистанционный, ручной и автоматический режимы работы задвижки;
2) формирует управляющие сигналы (команды):открыть или закрыть задвижку;
3) блокирует ошибочные команды (например, команду «открыть» при открытой задвижке);
4) осуществляет контроль времени схода задвижки с конечного выключателя (КВ);
5) обеспечивает антиреверсную защиту;
6) организует индикацию состояния задвижки;
7) формирует сигнал об аварии;
8) индицирует тип произошедшей аварии по запросу оператора.
Кратко поясним суть каждой функции. Режимы работы. Блоком управления задвижкой предусмотрено три режима работы. В ручном режиме оператор может управлять задвижкой по месту, т.е. кнопками: ОТКРЫТЬ или ЗАКРЫТЬ. Такой режим может использоваться при пуско-наладочных режимах или в аварийных ситуациях. Каковы же функции блока управления задвижкой в этом режиме? Это контроль состояния задвижки. Контроль времени перехода из одного состояния в другое. Контроль и блокировка неправильных действий оператора. Например, попытка открыть задвижку, когда другая задвижка открыта, что по технологии недопустимо. Если это напорная задвижка, то блокируется пуск центробежного насоса, если задвижка открыта. Блокировки в ручном режиме могут быть отключены по указанию начальника смены или системного администратора. Обычно отключение блокировок в ручном режиме производится с автоматизированного рабочего места оператора-технолога (АРМ). Данные действия фиксируются в журнале действий оператора. Как только оператор переходит на дистанционный режим или автоматический, то признак отключения блокировок в ручном режиме автоматически сбрасывается, т.е. все блокировки вновь автоматически восстанавливаются и при переключении в ручной режим будут действовать. Дистанционный режим аналогичен ручному, только управление задвижкой осуществляется с операторной: с лицевой панели контроллера или с АРМ[13] технолога-оператора. В автоматическом режиме блокировки не могут быть отключены, и если по данной задвижке выработался сигнал АВАРИЯ, то команды Открыть или Закрыть блокируются. Например, признак Авария сформировался при команде Открыть, следовательно, команда Открыть будет блокирована.
В автоматическом режиме, если отсутствует признак Авария, то блок управления задвижкой принимает команду и формирует на её выходе. В автоматическом режиме реализованы в случае, если БУЗ отдельно для задвижки, то реализуются следующие блокировки: команда Открыть, если задвижка открыта, команда Закрыть, если задвижка закрыта, блокируются команды в случае наличия признака АВАРИЯ, блокируются команды Открыть и Закрыть, если они поступили одновременно. Если задвижка закрыта, то формируется состояние «закрыта с КВ», который назовём нижним конечным выключателем (НКВ). Аналогично, если задвижка открыта, то сигнал будет идти с верхнего конечного выключателя (ВКВ) Во время пуско-наладочных испытаний задаётся время схода с КВ и время перехода из одного состояния в другое по каждой задвижке. Поэтому, как только появляется команда ОТКРЫТЬ, то сразу осуществляется отсчёт времени и контролируется время схода с НКВ. Если оно его превышает, то формируется признак Авария по задвижке. Если БУЗ работает автономно (на одну задвижку), то формируется признак Авария, но команда не сбрасывается. Если БУЗ работает в паре с насосом, то формируется признак Авария, сбрасывается команда Открыть и насос останавливается тоже с признаком Авария.
В автоматическом режиме команда сбрасывается в следующих ситуациях:
1) при нажатии соответствующего КВ;
2) по времени, т.е. когда не сработал КВ;
3) по появлению противоположной команды;
4) при не сходе с КВ за отведённое время.
В БУЗе предусмотрена антиреверсная защита. Суть антиреверсной защиты представлена на рис.55.
Сигнал АВАРИЯ формируется в следующих случаях (по следующим причинам):
1) оба КВ нажаты;
2) оба отжаты без команды;
3) не сработал ВКВ;
4) не сработал НКВ;
5) задвижка не сошла с НКВ;
6) задвижка не сошла с ВКВ.
Для технолога выдается просто один сигнал АВАРИЯ, для инженера по КИПиА при нажатии запрограммированной клавиши выдаются причины аварии.
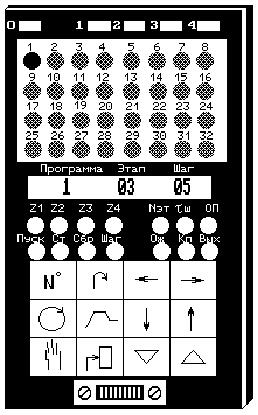
Рассмотрим лицевую панель логической модели контроллера Р-130, на которой очень удобно и наглядно представлять состояние задвижки или насоса. Учитывая расположение светодиодов на лицевой панели контроллера (Рис.51), закрепим их следующим образом:
- состояние задвижки: в положении ОТКРЫТА «горит» верхний (№1);
- если задвижка открывается, то светодиод №1мигает;
- ЗАКРЫТА ‑ «горит» нижний (№9);
- если задвижка закрывается, то светодиод №9мигает;
- появление команды ОТКРЫТЬ или ЗАКРЫТЬ подтверждается светодиодом №17;
- при возникновении аварии загорается светодиод (№25).[14]
- по нажатию программируемой кнопки на лицевой панели осуществляется индикация причин аварии.
Рис. 52 Лицевая панель логической модели контроллера Ремиконт Р-130
На рисунке 53 представлена структура алгоритма управления задвижкой.
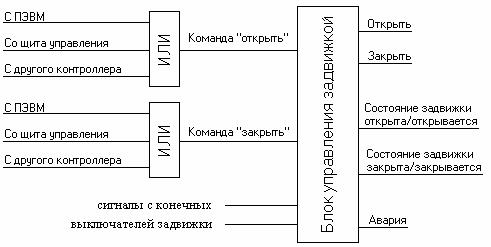
Рис. 53 Структурная схема программы управления задвижкой
Сигналы открытия и закрытия выдаются на исполнительный механизм; сигналы состояния и сигнал аварии могут передаваться на верхний уровень для отображения на мнемосхеме, например, АРМ-технолога.
Программа на языке FBD автономного алгоритма управления задвижкой представлена на рис.54.

Рис. 54 Программа управления задвижкой
Отображение информации на ЛП:
| Номер входа ОКЛ
| Цифровой индикатор
| Шифр входа
| Шкала
| Наименование
|
|
| Первый прямоугольный индикатор ЛП
| Nоп
|
| Авария
|
|
| ЦИ
| Z1
|
| Время открывания задвижки, с.
|
|
| ЦИ
| Z2
|
| Время закрывания задвижки, с.
|
Конфигурационная таблица.
Имя схемы: BUZSEV.rem
Дата создания отчета: 29/09/2009(ШМВ)
С И С Т Е М Н Ы Е П А Р А М Е Т Р Ы:
Системный номер контроллера: 2
Модель контроллера: Логическая
Комплектность УСО группы А: 8 ан.вх. и 2 ан.вых.(1)
Комплектность УСО группы Б: 8 д.вх. и 8 д.вых.(5)
Временной диапазон контроллера: Младший(Сек/Мин)
А Л Г О Р И Т М Ы И К О Н Ф И Г У Р А Ц И Я:
Таблица 14
| Ал.б.
| Алгоритм
| Мод
| Вход
| Значение
| Источник
|
|
|
|
| N Имя
|
| Ал.б. Выход
|
|
| ОКЛ(02)
|
|
|
|
|
|
|
|
| 1 Cпус
|
|
|
|
|
|
| 2 Cст
|
|
|
|
|
|
| 3 Cсбр
|
|
|
|
|
|
| 4 Nоп
|
| 6 1(D1)
|
|
|
|
| 5 z1
|
| 11 1(T)
|
|
|
|
| 6 Nz1
|
|
|
|
|
|
| 7 z2
|
| 12 1(T)
|
|
|
|
| 8 Nz2
|
|
|
|
|
|
| 9 z3
|
|
|
|
|
|
| 10 Nz3
|
|
|
|
|
|
| 11 z4
|
|
|
|
|
|
| 12 Nz4
|
|
|
|
| ВДБ(10)
|
|
|
|
|
|
| ЛОИ(70)
|
|
|
|
|
|
|
|
| 1 C11
|
| 19 1(D)
|
|
|
|
| 2 C21
|
| 13 9(D9)
|
|
| ИЛИ(72)
|
|
|
|
|
|
|
|
| 1 C11
|
| 5 1(D1)
|
|
|
|
| 2 С21
|
| 9 1(Y1)
|
|
|
|
| 3 C12
|
| 5 2(D2)
|
|
|
|
| 4 С22
|
|
|
|
|
|
| 5 C13
|
| 5 3(D3)
|
|
|
|
| 6 С23
|
| 9 2(Y2)
|
|
|
|
| 7 C14
|
| 5 4(D4)
|
|
|
|
| 8 С24
|
|
|
|
| ВИН(05)
|
|
| Резервный блок
|
|
|
|
| 1 Nист
|
|
|
|
|
|
| 2 N1
|
|
|
|
|
|
| 3 N2
|
|
|
|
| ЛОИ(70)
|
|
|
|
|
|
|
|
| 1 C11
|
| 7 1(D1)
|
|
|
|
| 2 C21
|
| 7 2(D2)
|
|
|
|
| 3 C12
|
| 7 3(D3)
|
|
|
|
| 4 C22
|
| 7 4(D4)
|
|
| ТМР(81)
|
|
|
|
|
|
|
|
| 1 Сст
|
|
|
|
|
|
| 2 Ссбр
| инверсия
| 27 1(D1)
|
|
|
|
| 3 T1
|
|
|
|
|
|
| 4 T2
|
|
|
|
| ТМР(81)
|
|
|
|
|
|
|
|
| 1 Сст
|
|
|
|
|
|
| 2 Ссбр
| инверсия
| 27 2(D2)
|
|
|
|
| 3 T1
|
|
|
|
|
|
| 4 T2
|
|
|
|
| ТРИ(76)
|
|
|
|
|
|
|
|
| 1 Cs1
|
| 10 1(D1)
|
|
|
|
| 2 Cr1
|
| 15 1(D)
|
|
|
|
| 3 Cs2
|
| 10 2(D2)
|
|
|
|
| 4 Cr2
|
| 16 1(D)
|
|
|
|
| 5 Cs3
|
| 24 3(D3)
|
|
|
|
| 6 Cr3
|
| 29 2(D1)
|
|
|
|
| 7 Cs4
|
| 11 3(D2)
|
|
|
|
| 8 Cr4
|
| 29 2(D1)
|
|
|
|
| 9 Cs5
|
| 24 4(D4)
|
|
|
|
| 10 Cr5
|
| 29 2(D1)
|
|
|
|
| 11 Cs6
|
| 12 3(D2)
|
|
|
|
| 12 Cr6
|
| 29 2(D1)
|
|
|
|
| 13 Cs7
|
| 21 1(D1)
|
|
|
|
| 14 Cr7
|
| 29 2(D1)
|
|
|
|
| 15 Cs8
|
| 22 1(D)
|
|
|
|
| 16 Cr8
|
| 29 2(D1)
|
|
|
|
| 17 Cs9
|
| 23 1(D)
|
|
|
|
| 18 Cr9
|
| 29 2(D1)
|
|
| ИЛИ(72)
|
|
|
|
|
|
|
|
| 1 C11
|
| 27 1(D1)
|
|
|
|
| 2 С21
|
| 27 2(D2)
|
|
| МИЛ(73)
|
|
|
|
|
|
|
|
| 1 C1
| инверсия
| 7 2(D2)
|
|
|
|
| 2 C2
|
| 24 3(D3)
|
|
|
|
| 3 C3
|
| 11 3(D2)
|
|
|
|
| 4 C4
|
| 10 2(D2)
|
|
| МИЛ(73)
|
|
|
|
|
|
|
|
| 1 C1
| инверсия
| 7 4(D4)
|
|
|
|
| 2 C2
|
| 24 4(D4)
|
|
|
|
| 3 C3
|
| 12 3(D2)
|
|
|
|
| 4 C4
|
| 10 1(D1)
|
|
| ТМР(81)
|
|
|
|
|
|
|
|
| 1 Сст
|
|
|
|
|
|
| 2 Ссбр
|
| 13 1(D1)
|
|
|
|
| 3 T1
|
|
|
|
| ТМР(81)
|
|
|
|
|
|
|
|
| 1 Сст
|
|
|
|
|
|
| 2 Ссбр
|
| 13 2(D2)
|
|
|
|
| 3 T1
|
|
|
|
| МУВ(84)
| -
|
|
|
|
|
|
|
| 1 Сп
|
|
|
|
|
|
| 2 Ссбр
|
|
|
|
|
|
| 3 T1
|
|
|
|
|
|
| 4 T0
|
|
|
|
| ОДВ(83)
| -
|
|
|
|
|
|
|
| 1 Cп
|
| 14 1(D1)
|
|
|
|
| 2 Ссбр
|
|
|
|
|
|
| 3 T
|
|
|
|
| ЛОИ(70)
|
|
|
|
|
|
|
|
| 1 C11
| инверсия
| 7 2(D2)
|
|
|
|
| 2 C21
| инверсия
| 7 4(D4)
|
|
| МНИ(71)
|
|
|
|
|
|
|
|
| 1 C1
| инверсия
| 20 1(D)
|
|
|
|
| 2 C2
|
| 7 4(D4)
|
|
|
|
| 3 C3
|
| 7 2(D2)
|
|
| МИЛ(73)
|
|
|
|
|
|
|
|
| 1 C1
|
| 13 3(D3)
|
|
|
|
| 2 C2
|
| 13 4(D4)
|
|
|
|
| 3 C3
|
| 13 5(D5)
|
|
|
|
| 4 C4
|
| 13 6(D6)
|
|
|
|
| 5 C5
|
| 13 7(D7)
|
|
|
|
| 6 C6
|
| 13 8(D8)
|
|
| ЛОИ(70)
|
|
|
|
|
|
|
|
| 1 C11
|
| 27 1(D1)
|
|
|
|
| 2 C21
|
| 19 1(D)
|
|
|
|
| 3 C12
|
| 27 2(D2)
|
|
|
|
| 4 C22
|
| 19 1(D)
|
|
|
|
| 5 C13
|
| 11 2(D1)
|
|
|
|
| 6 C23
| инверсия
| 7 4(D4)
|
|
|
|
| 7 C14
|
| 12 2(D1)
|
|
|
|
| 8 C24
| инверсия
| 7 2(D2)
|
|
| ИЛИ(72)
|
|
|
|
|
|
|
|
| 1 C11
| инверсия
| 7 2(D2)
|
|
|
|
| 2 С21
|
| 24 1(D1)
|
|
|
|
| 3 C12
| инверсия
| 7 4(D4)
|
|
|
|
| 4 С22
|
| 24 2(D2)
|
|
| ДИК(04)
|
|
|
|
|
|
|
|
| 1 С1
|
| 25 1(D1)
|
|
|
|
| 2 С2
|
|
|
| …
| …
| …
| …
| …
| …
|
|
|
|
| 9 С9
|
| 25 2(D2)
|
|
|
|
| 10 С10
|
|
|
| …
| …
| …
| …
| …
| …
|
|
|
|
| 17 С17
|
| 14 1(D1)
|
|
|
|
| 18 С18
|
|
|
| …
| …
| …
| …
| …
| …
|
|
|
|
| 25 С25
|
| 13 9(D9)
|
|
|
|
| 26 С26
|
| 28 1(D1)
|
|
|
|
| 27 С27
|
| 28 2(D2)
|
|
|
|
| 28 С28
|
| 28 3(D3)
|
|
|
|
| 29 С29
|
| 28 4(D4)
|
|
|
|
| 30 С30
|
| 28 5(D5)
|
|
|
|
| 31 С31
|
| 28 6(D6)
|
|
|
|
| 32 С32
|
| 1 9(Dкл)
|
|
| ЛОИ(70)
|
|
|
|
|
|
|
|
| 1 C11
|
| 13 1(D1)
|
|
|
|
| 2 C21
|
| 18 2(D1)
|
|
|
|
| 3 C12
|
| 13 2(D2)
|
|
|
|
| 4 C22
|
| 17 2(D1)
|
|
| ЛОИ(70)
|
|
|
|
|
|
|
|
| 1 C11
|
| 13 3(D3)
|
|
|
|
| 2 C21
|
| 1 9(Dкл)
|
|
|
|
| 3 C12
|
| 13 4(D4)
|
|
|
|
| 4 C22
|
| 1 9(Dкл)
|
|
|
|
| 5 C13
|
| 13 5(D5)
|
|
|
|
| 6 C23
|
| 1 9(Dкл)
|
|
|
|
| 7 C14
|
| 13 6(D6)
|
|
|
|
| 8 C24
|
| 1 9(Dкл)
|
|
|
|
| 9 C15
|
| 13 7(D7)
|
|
|
|
| 10 C25
|
| 1 9(Dкл)
|
|
|
|
| 11 C16
|
| 13 8(D8)
|
|
|
|
| 12 C26
|
| 1 9(Dкл)
|
|
| ТМР(81)
|
|
|
|
|
|
|
|
| 1 Сст
|
|
|
|
|
|
| 2 Ссбр
|
| 1 9(Dкл)
|
|
|
|
| 3 T1
|
|
|
|
| ДВБ(14)
|
|
|
|
|
|
|
|
| 1 C1
|
| 27 1(D1)
|
|
|
|
| 2 C2
|
| 27 2(D2)
|
В таблице 15 приведена расшифровка алгоритмов, использованных в программе. Следует обратить внимание, наряду с классическими алгоритмами И, ИЛИ, НЕ, ТРИ в программе используются и другие алгоритмы: таймер, мультивибратор, одновибратор, алгоритм интерфейсного ввода, алгоритмы вывода команд через УСО и алгоритм вывода состояния дискретных сигналов на лицевую панель контроллера.
Таблица 15
| Номер алгобло-ка
| Шифр алгорит-ма
| Комментарии
|
|
| ОКЛ
| Алгоритм оперативного контроля позволяет контролировать время перехода задвижки и отображать аварию на первом прямоугольном индикаторе.
|
|
| ВДБ
| Ввод дискретных сигналов группы Б. Первый канал – команда ОТКРЫТЬ. Второй канал- состояние ОТКРЫТА (сигнал с ВКВ). Третий канал - команды ЗАКРЫТЬ, четвёртый канал - сигнала с НКВ.[15]
|
|
| ЛОИ
| Логическое И. Формирует мигающий световой сигнал в момент появления аварии.
|
|
| ИЛИ
| Логическое ИЛИ. Сборка команд ОТКРЫТЬ или ЗАКРЫТЬ.
|
|
| ВИН
| Ввод интерфейсный. Ввод команд «открыть» и «закрыть» с другого контроллера, например, с контроллера №2.
|
|
| ЛОИ
| Логическое И. Блокировка команды «открыть» при нажатом КВ открыта и команды «закрыть» при нажатом КВ закрыта.
|
|
| ТМР
| Таймер. Отсчет времени схождения с НКВ закрытия и времени открывания задвижки.
|
|
| ТМР
| Таймер. Отсчет времени схождения с ВКВ и времени закрывания задвижки.
|
|
| ТРИ
| Триггер. Установка и сброс команд «открыть», «закрыть», фиксирование причин аварии.
|
|
| ИЛИ
| Логическое ИЛИ. Объединение команды ОТКРЫТЬ или ЗАКРЫТЬ и формирование на выходе признака команды.
|
|
| МИЛ
| Многовходовое ИЛИ. Формирование сигнала сброса команды «открыть».
|
|
| МИЛ
| Многовходовое ИЛИ. Формирование сигнала сброса команды «закрыть».
|
|
| ТМР
| Таймер антиреверсной защиты. Отсчет времени блокировки команды «закрыть» при отработке команды «открыть».
|
|
| ТМР
| Таймер антиреверсной защиты. Отсчет времени блокировки команды «открыть» при отработке команды «закрыть».
|
|
| МУВ
| Мультивибратор.
|
|
| ОДВ
| Одновибратор. Срабатывает при появлении команды и формирует импульс длительностью Т, блокирующий сигнал АВАРИЯ на время перехода задвижки из одного состояния в другое, когда оба КВ отжаты.
|
|
| ЛОИ
| Логическое И. Формирование сигнала АВАРИЯ в ситуации, когда появляются сигналы, что оба КВ нажаты.
|
|
| МНИ
| Многовходовое И. Блокировка АВАРИИ в ситуации, когда появляются сигналы, что оба КВ отжаты на время перехода задвижки из одного состояния в другое, т.е. переход по команде.
|
|
| МИЛ
| Многовходовое ИЛИ. Сборка аварий
|
|
| ЛОИ
| Логическое И. Формирование сигналов «открывается» и «закрывается» для индикации, контроль схода с КВ.
|
|
| ИЛИ
| Логическое ИЛИ. Формирование сигналов «открыта/открывается» и «закрыта/закрывается», для индикации.
|
|
| ДИК
| Дискретный контроль. Выдача сигналов на светодиоды лицевой панели (индикация).
|
|
| ЛОИ
| Логическое И. Временная блокировка поступающей команды Открыть при наличии команды Закрыть и наоборот.
|
|
| ЛОИ
| Логическое И. Формирование условной выдачи причин аварии. Причины аварии проходят на индикацию по нажатию клавиши на ЛП контроллера.
|
|
| ТМР
| Таймер. Индикация причин аварии заданное время.
|
|
| ДВБ
| Дискретный вывод команд (Открыть, Закрыть) – алгоритм выдачи команд через УСО контроллера по группе Б.
|
Рассмотрим ещё одну ситуацию, которая встречается при пуско-наладочных работах и освоении новой технологии. Допустим, ошибочно подана команда Открыть. Задвижка начала открываться, сошла с НКВ и тут, оператор спохватился и подаёт команду Закрыть. В этом случае команда Открыть сбрасывается, а команда Закрыть задерживается на несколько секунд. Задержка по времени при прохождении противоположной команды связана с антиреверсной защитой. Суть антиреверсной защиты заключается в следующем. Антиреверсная защита не позволяет при движении задвижки в одном направлении мгновенно переключиться на противоположное направление. Например, задвижка начала открываться, но ещё не достигла своего крайнего положения, как вдруг поступает команда Закрыть. В таком случае сбрасывается команда Открыть, делается задержка по времени и только после истечении этого времени пропускается команда Закрыть. Таким образом, антиреверсная защита обеспечивает корректный переход от открывания к закрыванию или наоборот, что исключает удары в редукторе. Данный фрагмент программы приведён на рис.55.

Рис. 55 Фрагмент программы на языке FBD с блокировкой и антиреверсной защитой
Этот фрагмент программы позволяет лучше понять назначение защит по входу и антиреверсную защиту.
Следует отметить, что в реальной системе управления задвижкой должны быть реализованы следующие моменты: должен осуществляться контроль напряжения питания цепей КИП и А, напряжение питания электродвигателя, должен контролироваться рабочий ресурс задвижки, конечных выключателей и прогнозироваться время профилактики или время вероятного отказа.
9.4. Контрольные вопросы
1) Что такое дискретный автомат? Что такое комбинационная схема?
2) Приведите алгоритм синтеза дискретного автомата.
3) Как реализуется память в дискретном автомате?
4) Что означает автомат с жёсткой последовательностью ситуаций?
5) Поясните программу управления задвижкой.
6) Основные назначения, основные функции блока управления задвижкой.
7) Какие блокировки ставятся на входе алгоритма?
8) Какие защиты требуется обеспечить? Поясните их программную реализацию.
9) Что такое антиреверсная защита и как она реализуется программно?
10) Как контролируется сход с нижнего или верхнего конечного выключателя?
11) Какие аварийные ситуации заложены в алгоритм управления задвижкой? Перечислить.
12) Как в программе реализуется распознавание аварийных ситуаций?
13) Какая информация выдается на лицевую панель логической модели.
14) Особенности реализации алгоритма управления группой задвижек.
15) Как в алгоритме обеспечивается защита от недопустимого по условиям технологии открытия или закрытия одной из группы задвижек?
16) В чем заключается особенность управления пневмозадвижкой?
17) Поясните реализацию автоматического открытия или закрытия задвижки в зависимости от значения технологического параметра.
18) Вопросы по программе: назначение каждого алгоритма, почему установлены инверсии на входах некоторых алгоблоков?
19) Что будет (т.е. как измениться работа программы), если ту или иную инверсию забыть установить?
20) Почему рекомендуется при нажатии на конечный выключать цепь должна разрываться и в программу должен поступать ноль, а не единица?
21) Какую защиту необходимо ставить по входным каналам в дискретном автомате?
22) Чем отличается алгоритм простого дискретного автомата от дискретного автомата с памятью?
23) Как реализуется дискретный автомат с памятью?
24) Как реализуется защита от несинхронного появления состояний для одной ситуации?
25) Как реализовать контроль за жёстким появлением очередного состояния?
26) Минимизация: классическая, структурная.
27) Как осуществляется привязка полученной структуры дискретного автомата к конкретным аппаратным и программным средствам? Например, к контроллеру Р-130 или ПЛК-154.
28) Перечислите режимы работы при реализации системы управления центробежными насосами.
29) Какие параметры, состояния необходимо контролировать перед пуском и во время работы системы (насос – напорная задвижка)?
30) Перечислите функции управления.
31) Перечислите блокировки.
32) Поясните суть защит от несвоевременного пуска или останова насоса.
33) К каким последствиям может привести отсутствие защиты от несинхронного появления запросов?
34) Какие защиты должны стоять по входным дискретным каналам?
35) Как избежать гидравлических ударов в системе насос и напорная задвижка?
36) Как избежать кавитации при пуске насоса?
37) В каком случае и как реализуется аварийный останов насоса?
Реализация систем автоматического пуска и останова центробежных насосов даётся на лекциях и частично представлена в следующих публикациях[65, 71, 74].
10. Организация связи с верхним уровнем [16]
Инструментальная система SCADA[17] TRACE MODE позволяет создавать проект автоматизированной системы управления технологическим процессом (АСУТП) в идеологии единой линии программирования, когда все задачи проекта на верхнем уровне решаются единым инструментом, а все данные хранятся в единой системе управления базами данных (СУБД) распределенного проекта. В SCADA TRACE MODE поддерживается технология автопостроения проекта. Инструментальные средства включают в себя Редактор представления данных (РПД), Редактор базы каналов (РБК) и Редактор шаблонов отчетов (РШ).
Описание TRACE MODE взято с сайта разработчика http://www.adastra.ru/[1].
Редактор представления данных (РПД) - инструмент разработки экранных форм операторского интерфейса SCADA/HMI[18]. В РПД для каждого узла проекта АСУТП создаются графические экраны, формируются статичные мнемосхемы процесса, осуществляется их динамизация путем векторной и AVI-анимации. Создаются виртуальные органы управления, тренды реального времени (графическое представление изменения значений параметров во времени), формируются архивы отчетов нарушений технологического режима (формируются отчеты тревог). Осуществляется встраивание в проект ActiveX - компонентов.
Редактор представления данных (РПД) SCADA TRACE MODE содержит графические библиотеки с более чем 600-ю технологическими объектами АСУТП (как статичными, так и анимированными), готовыми к использованию в прикладных проектах. Среди них: панели управления, приборы, теплообменники, емкости, сепараторы, колонны, насосы, клапаны, электрические элементы и т.д. Общее количество готовых графических объектов SCADA TRACE MODE превышает 1000.
Все проекты, разработанные в РПД, могут быть экспортированы в формат XML для создания web-консолей SCADA, работающих через Internet.
Редактор базы каналов (РБК) - инструмент разработки распределенной базы данных реального времени проекта АСУТП. В РБК производятся следующие настройки:
- создаются узлы проекта TRACE MODE - операторские станции и контроллеры;
- производится настройка на платы ввода/вывода и контроллеры (DLL, DDE, OPC);
- задаются технологические границы и алармы[19], производится визуальное программирование алгоритмов управления на языках Techno FBD TechnoLD и Techno IL (IEC 61131-3);
- программируются функции горячего резервирования серверов SCADA, настраивается сетевой обмен, связь с базами данных и приложениями;
- создается система архивирования данных.
В состав РБК входит библиотека встроенные драйвера PLC и платы УСО.
Приведём расшифровку некоторых используемых сокращений.
Data Definition Language (DDL) (язык описания данных) — это семейство компьютерных языков, используемых в компьютерных программах для описания структуры баз данных.
Dynamic Data Exchange (DDE) — механизм взаимодействия приложений в операционных системах Microsoft Windows и OS/2.
OPC (OLE for Process Control) — семейство программных технологий, предоставляющих единый интерфейс для управления объектами автоматизации и технологическими процессами.
OLE (англ. Object Linking and Embedding, произносится как oh-lay [олэй]) — технология связывания и внедрения объектов в другие документы и объекты, разработанные корпорацией Майкрософт.
При создании системы с горячим резервированием в TRACE MODE 5 указывают, что ПК или контроллер должен иметь дубль и SCADA-система сама сгенерирует и настроит необходимую базу данных (базу каналов). При изменении конфигурации основных узлов, TRACE MODE автоматически обновит узлы-дубли.
РБК производит автоматическое генерирование отчетной документации по проекту АСУТП.
В данном пособии рассмотрим пример организации связи с верхним уровнем контроллера Ремиконт Р-130 (регулирующая модель), имеющего логический номер 02 в сети «Транзит»(сетевой адрес 02) и подключенного к ЭВМ с помощью COM порта.
Для организации связи SCADA – системы с контроллером создают проект. Для создания нового проекта следует выполнить операцию Файл -> Создать. После этого откроется окно Свойства проекта, в котором задается имя проекта(максимальная длина имени 18 символов). Далее необходимо создать Узел, Для этого необходимо выполнить операцию Узел -> Создать. После чего появляется окно Имя и тип узла (рис. 56), в котором назначается имя и выбирается тип нового узла.
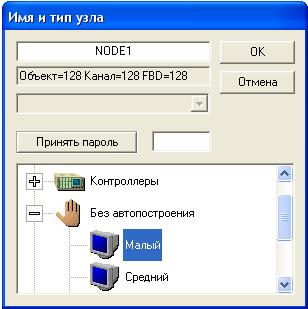
Рис. 56 Имя и тип узла
Настройка узла и редактирование его параметров осуществляется через окно диалога Параметры узла (см. рис. 57), которое вызывается нажатием правой кнопки мыши на его изображение.

Рис. 57 Параметры узла
В закладке Связь по последовательным интерфейсам осуществляют следующие настройки(см. рис. 57).
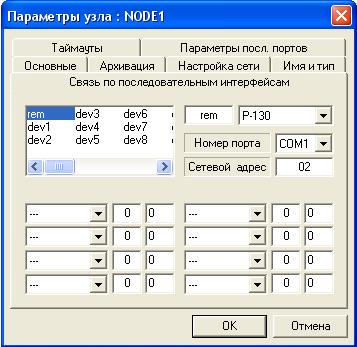
Рис. 58 Параметры узла
В каждом конкретном случае уточняют, через какой COM – порт осуществляется связь локальной сетию контроллеров с ПЭВМ. Сетевой адрес контроллера может отличаться от номера COM-порта.
В закладке Параметры последовательных портов (см. рис. 58) настраивают COM-порт (в нашем случае COM1):

Рис. 59 Параметры узла
Если установили другой COM-порт, то изменится и базовый адрес.
Настройки завершены, нажимаем ОК. Далее нажимаем на NODE1 два раза левой кнопкой мыши и в появившемся окне нажимаем ОК. После чего появляется следующая панель (см. рис. 59):
Рис. 60 Редактор базы каналов
Для связи контроллера с верхним уровнем необходимо в TRACE MODE создать каналы, а в программе контроллера Р-130 необходимые выхода алгоблоков сделать внешними. Рассмотрим выше указанные операции на примере реализации циклограммы (см. рис. 60):

Рис. 61 Циклограмма
Моменты времени, обозначенные на рис.60, t1, t2, t3, t4, t5, t6 назовём реперными точками. Эта циклограмма и программа были приведены в основном тексте пособия (рис.36 и рис.37). Сюда они скопированы для удобства чтения и понимания сути. Здесь программа приводится без пояснений. Для этой циклограммы программа выглядит следующим образом:

Рис. 62 Программа циклограммы на языке FBD
В данной программе (рис.61) есть ошибка, которая была сделана намеренно и будет проанализирована и исправлена в дальнейшем.
Перед нами стоит следующая задача: С ПЭВМ должны формироваться команды: Стоп, Сброс. Кроме того, с ПЭВМ следует предусмотреть задание значений реперных точек, в которых осуществляется изменение состояния команд. С ПЭВМ необходимо предусмотреть установку заданного количества циклов. На ПЭВМ синхронно с контроллером необходимо отображать следующие параметры: текущее время от начала цикла, количество прошедших циклов и состояние команд.