В качестве примера рассмотрим циклограмму, представленную на рис.23.

Рис. 23 Циклограмма 1
Выше перечислены основные моменты, выполняемые перед программированием циклограммы. В лаборатории циклограмма реализуется весьма упрощённо. В реальной жизни могут потребоваться дополнительные проверки состояния оборудования, прежде чем перейти к следующему шагу, т.е. работа не только по времени, но и по состоянию (например, по положению задвижек, значению параметра (уровню, температуры)). Кроме того, должно контролироваться время выполнения команды. Допустим, что подаётся команда С1, например, команда «открыть задвижку». Данная команда не может выполниться мгновенно, поэтому в некоторых случаях целесообразно приостанавливать таймер на время выполнения команды.
На практике циклограмма должна запускаться оператором, даже если с кнопок или тумблеров, как в нашем случае, не поступают на таймер команды Стоп или Сброс.
Поясним принцип «вырезки» команды на простом примере, например, как получить команду С21. Допустим, что команды не поступают на входы Сст и Ссбр таймера. Тогда таймер (см. рис.4) начинает работать с нуля, отсчитывая секунды, т.к. масштаб времени младший [71, ч.1, с.32]. Команда С21 до 4-х секунд равна нулю: С21=0. В момент времени t=4 на выходе D1 формируется единица, D1=1. В это время на выходе D2=0, но этот сигнал поступает на второй вход элемента И инверсно. Следовательно, на выходе элемента И появляется единичный сигнал: С21=1. Как только текущее значение таймера станет равным 6-ти, то С21=0. Таким образом, формируется на интервале от 4-х до 6-ти секунд команда С21=1 (рис.24).

Рис. 24 Формирования команды С21
На рис.25 представлена циклограмма формирования команды С1, состоящей из трёх частей: С11, С12 и С13. Первые две части команды С1 можно реализовать простой «вырезкой». Третья часть команды С13 не требует «вырезки» и подаётся с пятого нуль-органа сразу на третий вход элемента ИЛИ. Все три части объединяются на элементе ИЛИ, на выходе которого формируется команда С1. На рис.26 представлена программа формирования команды С1. Эту же циклограмму можно реализовать иначе (рис.27).

Рис. 25 Циклограмма

Рис. 26 Программа 1 формирования команды С1
Учитывая принцип работы таймера и особенность формирования первой части С11 команды С1, подадим выход второго нуль-органа D2 на первый вход элемента ИЛИ инверсно.
Результат работы обеих программ одинаков, но во второй программе исключён шаблон мышления. Программа получилась проще.
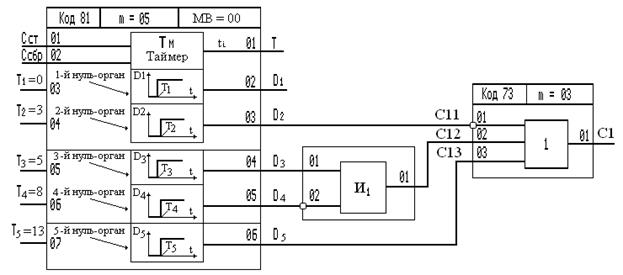
Рис. 27 Программа 2 формирования команды С1
Рассмотрев выше особенности программной реализации, представим программу (рис.28), реализующую циклограмму, изображённую на рис.23.

Рис. 28 Программа реализации циклограммы 1
Отображение информации на ЛП (контур 1)
| Номер входа
| Цифровой индикатор
| Шифр входа
| Шкала
| Наименование
|
|
| ЦИ
| Z1
|
| Текущее время циклограммы
|
|
| ЦИ
| Z2
|
| Номер текущего цикла циклограммы
|
В программе (рис.28) команды поступают с имитатора[71, 74]. Команды Стоп, Сброс можно задавать не только с имитатора, но и с ЛП логической модели контроллера. Команды Стоп, Сброс можно формировать с помощью алгоритма ЭТП. Фрагмент программы с алгоритмом ЭТП приведён на рис.29. Команды Стоп, Сброс можно подавать и с ПЭВМ, но следует учесть, что признак переменной на входе алгоблока, принимающего команды с ПЭВМ, должен быть установлен как «коэффициент»[74, с.43]. В этом случае команда Стоп или Сброс должна поступать через трёхвходовой алгоритм ИЛИ (МИЛ): команда подаётся или с ЛП, или с имитатора, или с ПЭВМ. Так как команды С5 и С7 полностью повторяют команду С2, то в программе команда С2 поступает и на С5, и на С7!
Конфигурационная таблица программы 1
Имя схемы: Zikl-RIS28.REM
Дата создания отчета: 2/12/2009(СВГ)
С И С Т Е М Н Ы Е П А Р А М Е Т Р Ы
Системный номер контроллера: 3
Модель контроллера: Логическая
А Л Г О Р И Т М Ы И К О Н Ф И Г У Р А Ц И Я
Таблица 13
| Ал.б.
| Алгоритм
| Мод
| Вход
| Значение
| Источник
|
|
|
|
| N Имя
|
| Ал.б. Выход
|
|
| ОКЛ(02)
|
|
|
|
|
|
|
|
| 1 Cпус
|
|
|
|
|
|
| 2 Cст
|
|
|
|
|
|
| 3 Cсбр
|
|
|
|
|
|
| 4 Nоп
|
|
|
|
|
|
| 5 z1
|
| 7 1(T)
|
|
|
|
| 6 Nz1
|
|
|
|
|
|
| 7 z2
|
| 10 1(N)
|
|
|
|
| 8 Nz2
|
|
|
|
| ВДБ(10)
|
|
|
|
|
|
| ИЛИ(72)
|
|
|
|
|
|
|
|
| 1 C11
|
| 5 1(D1)
|
|
|
|
| 2 С21
|
| 10 2(D1)
|
|
|
|
| 3 C12
|
| 5 2(D2)
|
|
|
|
| 4 С22
|
| 8 10(D10)
|
|
| ТМР(81)
|
|
|
|
|
|
|
|
| 1 Сст
|
| 6 1(D1)
|
|
|
|
| 2 Ссбр
|
| 6 2(D2)
|
|
|
|
| 3 T1=4
|
|
|
|
|
|
| 4 T=6
|
|
|
|
|
|
| 5 T=11
|
|
|
|
|
|
| 6 T4=16
|
|
|
|
|
|
| 7 T5=18
|
|
|
|
|
|
| 8 T=21
|
|
|
|
|
|
| 9 T=23
|
|
|
|
|
|
| 10 T=24
|
|
|
|
| ЛОИ(70)
|
|
|
|
|
|
|
|
| 1 C11
|
| 7 2(D1)
|
|
|
|
| 2 C21
| инверсия
| 7 5(D4)
|
|
|
|
| 3 C12
|
| 7 6(D5)
|
|
|
|
| 4 C22
| инверсия
| 7 7(D6)
|
|
|
|
| 5 C13
|
| 7 2(D1)
|
|
|
|
| 6 C23
|
| 7 3(D2)
|
|
|
|
| 7 C14
|
| 7 4(D3)
|
|
|
|
| 8 C24
| инверсия
| 7 6(D5)
|
|
|
|
| 9 C15
|
| 7 4(D3)
|
|
|
|
| 10 C25
| инверсия
| 7 6(D5)
|
|
|
|
| 11 C16
|
| 7 3(D2)
|
|
|
|
| 12 C26
| инверсия
| 7 4(D3)
|
|
|
|
| 13 C17
|
| 7 5(D4)
|
|
|
|
| 14 C27
| инверсия
| 7 6(D5)
|
|
|
|
| 15 C18
|
| 7 2(D1)
|
|
|
|
| 16 C28
| инверсия
| 7 4(D3)
|
|
|
|
| 17 C19
|
| 7 6(D5)
|
|
|
|
| 18 C29
| инверсия
| 7 7(D6)
|
|
|
|
| 19 C110
|
| 7 9(D8)
|
|
|
|
| 20 C210
|
| 9 5(Сбр)
|
|
| ИЛИ(72)
|
|
|
|
|
|
|
|
| 1 C11
|
| 8 1(C11)
|
|
|
|
| 2 С21
|
| 8 2(C12)
|
|
|
|
| 3 C12
|
| 8 3(D21)
|
|
|
|
| 4 С22
|
| 8 4(D22)
|
|
|
|
| 5 C13
|
| 8 6(D41)
|
|
|
|
| 6 С23
|
| 8 7(D42)
|
|
|
|
| 7 C14
|
| 8 8(D61)
|
|
|
|
| 8 С24
|
| 8 9(D62)
|
|
|
|
| 9 C15
|
| 5 2(D2)
|
|
|
|
| 10 С25
|
| 1 9(Dкл)
|
|
| СЧТ(82)
|
|
|
|
|
|
|
|
| 1 Cб
|
| 7 9(D8)
|
|
|
|
| 2 См
|
|
|
|
|
|
| 3 Сст
|
|
|
|
|
|
| 4 Cсбр
|
| 9 5(Сбр)
|
|
|
|
| 5 No
|
|
|
|
|
|
| 6 N1=2
|
| Число повторений цикла
|
|
|
|
| 7 N2
|
|
|
|
| ДВБ(14)
|
|
|
|
|
|
|
|
| 1 C1
|
| 9 1(C1)
|
|
|
|
| 2 C2
|
| 9 2(C2=C5=C7)
|
|
|
|
| 3 C3
|
| 8 5(C3)
|
|
|
|
| 4 C4
|
| 9 3(C4)
|
|
|
|
| 5 C5
|
| 9 2(C2=C5=C7)
|
|
|
|
| 6 C6
|
| 9 4(C6)
|
|
|
|
| 7 D7
|
| 9 2(C2=C5=C7)
|
|
| ДИК(04)
|
|
|
|
|
|
|
|
| 1 С1
|
| 9 1(C1)
|
|
|
|
| 2 С2
|
| 9 2(C2=C5=C7)
|
|
|
|
| 3 С3
|
| 8 5(C3)
|
|
|
|
| 4 С4
|
| 9 3(C4)
|
|
|
|
| 5 С5
|
| 9 2(C2=C5=C7)
|
|
|
|
| 6 С6
|
| 9 4(C6)
|
|
|
|
| 7 С7
|
| 9 2(C2=C5=C7)
|
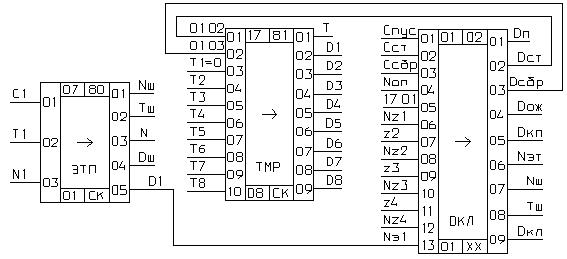
Рис. 29 Программа ввода команд с ЛП
На рис.29 показан один из вариантов программы, позволяющей вводить с ЛП команду Стоп или Сброс. Команда Стоп (Dст) формируется на втором выходе алгоритма ОКЛ при нажатии на ЛП контроллера следующих клавиш:  . Команда Сброс (Dсбр) появляется на третьем выходе ОКЛ при нажатии клавиш:
. Команда Сброс (Dсбр) появляется на третьем выходе ОКЛ при нажатии клавиш:  . При формировании команды Пуск (Dп):
. При формировании команды Пуск (Dп):  , команды Dст или Dсбр сбрасываются.
, команды Dст или Dсбр сбрасываются.







