Механическая характеристика двигателя с постоянными магнитами – зависимость n = f (M) между электромагнитным моментом M и скоростью вращения n при различных напряжениях U 1, U 2, U 3 на якоре (роторе коллекторного электродвигателя) – изображена на рис. 2.11.
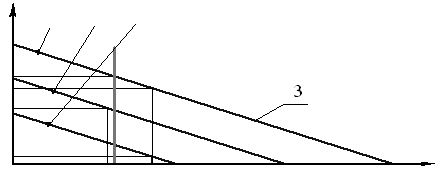
Рис. 2.11. Механическая характеристика двигателя
с постоянными магнитами
Согласно (2.2) и (2.3)
 (2.5)
(2.5)
где  – конструктивный коэффициент.
– конструктивный коэффициент.
Так как для конкретного двигателя K к = const, то электромеханическая характеристика n = f (I) имеет вид аналогичный механической характеристике.
Всегда статический (не зависящий от ускорения) электромеханический момент в точности равен моменту статической нагрузки на валу двигателя (действие равно противодействию) и не зависит от мощности двигателя. От мощности двигателя зависит так называемый номинальный момент M н при номинальной нагрузке, номинальной скорости n = n н, номинальном напряжении U н = U 3н и номинальном токе I = I н. Параметры P н – номинальная мощность на валу двигателя, n н, U н, I н указывают в паспорте двигателя. Значение М н легко вычислить, т. к. P н = M нp n н /30.
При пуске двигателя на номинальном напряжении скорость n дв = 0, а момент на валу равен пусковому моменту M п (см. рис. 2.11, характеристика 3). По мере разгона двигателя скорость растет, а момент уменьшается. Когда момент двигателя сравняется со статическим моментом нагрузки M ст, разгон прекращается, наступает установившееся движение со скоростью n дв ³ n н.
Максимальное ускорение наблюдается в момент пуска, оно может быть найдено исходя из основной формулы динамики
 (2.6)
(2.6)
 (2.7)
(2.7)
где M ст – статическая составляющая момента нагрузки (технологический момент, момент сил трения и т. п.);
M дин – динамическая составляющая момента нагрузки.
Для исключения перегрева двигателя и искрения на коллекторе нельзя превышать номинальный ток I н, кроме кратковременного (на несколько секунд) периода во время пуска. Для изменения скорости при номинальном или меньшем токе (моменте) следует изменить напряжение на якоре. При U 1 и I н получим n 1, при U 2 и I 2 – n 2 (рис. 2.11).
Напряжение можно менять плавно или ступенчато, соответственно получим плавное или ступенчатое изменение скорости. В двигателях с электромагнитным возбуждением (с электромагнитами) скорость можно также менять, регулируя магнитный поток. Обычно до номинального значения n н скорость изменяют с помощью напряжения U, выше n н скорость меняют, ослабляя магнитный поток. Предел скорости вращения определяется условиями коммутации токов на коммутаторе и механической прочностью якоря.
При пуске двигателя пусковой ток I п может существенно превышать допустимый. Поэтому пуск часто осуществляют при пониженном напряжении и токе, например при U2 и I п2.
Двигатели с электромагнитами можно включить по двум основным схемам: схеме с независимым возбуждением, когда катушки электромагнитов подключают к отдельному (независимому) источнику питания, и схеме с последовательным возбуждением, когда катушки электромагнитов включают последовательно с обмотками якоря (включают в цепь питания якоря). В первом случае получают «жесткую» механическую характеристику, такую же, как при постоянных магнитах (рис. 2.11). Во втором случае имеют «мягкую» характеристику (рис. 2.12), т. е. при уменьшении нагрузки двигатель развивает очень большую скорость, а при увеличении нагрузки скорость резко падает. Это свойство используется в транспортных устройствах для обеспечения плавного разгона.
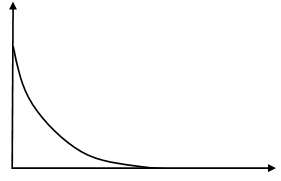
Рис. 2.12. «Мягкая» характеристика двигателя
Однако лучшими регулировочными свойствами обладают двигатели независимого возбуждения и с постоянными магнитами, поэтому в настоящее время они имеют преимущественное применение. Практически все современные электродвигатели малой мощности, так называемые микродвигатели, имеют устройство возбуждения с постоянными магнитами.
Двигатели средней мощности выполняются с постоянными магнитами и электромагнитами (более дешевый вариант). В двигателях большой мощности используются электромагниты.








