Такие двигатели широко используются в различных электроинструментах (электрические дрели, рубанки, пилы и др.). Благодаря высокой скорости вращения (более 10 000 об/мин) они имеют высокую мощность при малых габаритах и весе, что и требуется в ручных инструментах. Кроме того, эти двигатели могут работать при питании от однофазной бытовой сети.
По существу коллекторные двигатели переменного тока являются аналогом коллекторных двигателей постоянного тока, но питаются они переменным током. Такое возможно, если определенным образом соединить последовательно обмотку якоря и обмотку возбуждения (рис. 2.22). Тогда при перемене полюсов N→S→N→S с частотой 50 Гц синхронно меняется и направление тока в катушках якоря, а направление магнитодвижущих сил и моментов сохраняется. Тиристорный регулятор (ключ K) регулирует напряжение и, таким образом, изменяет скорость вращения от 0 до max.


Рис. 2.22. Схема коллекторного двигателя переменного тока
Некоторые из этих двигателей допускают двойное питание, т. е. их можно подключать к сетям и постоянного и переменного тока.
Очевидным недостатком коллекторных двигателей переменного тока является наличие коллектора и щеточного аппарата.
2.3.6 Синхронные вентильные электродвигатели
переменного тока
Синхронные вентильные электродвигатели переменного тока – это современные, перспективные электрические машины с высокими регулировочными свойствами. Применяются такие двигатели, в основном, в сервоприводах[4] высокого качества.
Принцип действия. Конструкция синхронного вентильного двигателя мало отличается от вентильного (бесколлекторного) двигателя постоянного тока (см. рис. 2.10). У него так же, как и у обращенного двигателя постоянного тока, на роторе закреплены «мощные» постоянные магниты, а на статоре - обмотка, токами в которой управляет электронный блок. Отличие от двигателя постоянного тока заключается в том, что в обмотку статора от электронного блока подается переменный трехфазный ток синусоидальной формы. Ток создает вращающееся электромагнитное поле, которое взаимодействует с полем постоянных магнитов ротора и вызывает вращение ротора. В отличие от асинхронного двигателя, скорость вращения ротора в точности соответствует скорости вращения поля статора и вычисляется по формуле
 (2.13)
(2.13)
При увеличении нагрузки ротор начинает отставать по фазе (углу), но не по скорости, от поля статора. Датчик угла поворота ротора совместно с электронным блоком фиксирует это отставание и путем увеличения тока в обмотках (увеличения момента двигателя) отставание сводится к минимуму. Таким образом, осуществляется самоуправление двигателя и, в отличие от классического синхронного двигателя, вентильный двигатель никогда не выпадает из синхронизма, легко запускается и не останавливается при отставании по фазе. Длительная перегрузка двигателя недопустима, так как при перегрузке размагничиваются магниты ротора. Скорость двигателя регулируется путем изменения частоты f питающего тока.
Конструкция двигателя. Статор двигателя близок по конструкции к статору асинхронного двигателя. Он выполнен из шихтованного железа, в пазах статора уложены три обмотки в соответствии с 3-х фазным питанием. Ротор двигателя несет на себе постоянные магниты (обычно магниты приклеены к ротору). Число магнитов соответствует числу полюсов 2 р двигателя. Низкоскоростные двигатели имеют много полюсов и могут быть выполнены в виде кольца или диска. С ротором двигателя связывают датчик угла поворота ротора, в качестве которого используют резольвер – вращающийся трансформатор.
Шаговые электродвигатели
Шаговые двигатели относят к синхронным двигателям. Это многополюсные машины с импульсным питанием. Схема двигателя в виде развертки по сечению А-А ротора и статора изображена на рис. 2.23.

Рис. 2.23. Схема шагового двигателя:
1, 2, 3, 4 – зубчатый магнитопровод; 5, 6, 7, 8 – обмотки
Статор двигателя выполнен в виде зубчатого магнитопровода 1…4, в пазах которого уложены обмотки 5…8. Ротор двигателя также зубчатый, сделан из магнитомягкой стали.
При подаче импульса тока в обмотку 5 ротор устанавливается в позицию наименьшего магнитного сопротивления, зубцы ротора – против зубцов магнитопровода 1 (как изображено на рисунке).
Следующий импульс тока подается в обмотку 6. Ротор сдвигается на 1/4 шага зубцов и устанавливается своими зубцами напротив зубцов магнитопровода 2. Следующий импульс тока, поданный в обмотку 7, сдвигает ротор еще на 1/4 шага и так далее.
Таким образом, ротор двигается поворачивается шагами с частотой, равной частоте подаваемых на обмотки импульсов тока. Подав на двигатель определенное число импульсов тока, можно переместить связанное с ним исполнительное звено на определенное расстояние или угол. После перемещения двигатель может фиксировать положение звена, работая в тормозном режиме.
Все это удобно при создании приводов позиционирования. Однако, в связи с тем, что двигатель работает в старт-стопном режиме с большими ускорениями, он не может перемещать объекты с большой инерцией. Допустимый, приведенный, к валу двигателя момент инерции указывается в паспорте двигателя. В паспорте указывается также частота приемистости – предельная частота, при которой не наблюдаются пропуски шаговых перемещений. Тяговые усилия шаговых двигателей и их скорости вращения относительно невелики, поэтому шаговые двигатели как правило применяются в приводах малой мощности, до 100 Вт.
Линейные электродвигатели
Практически любой из рассмотренных выше вращательных электродвигателей можно преобразовать в двигатель поступательный с линейным перемещением якоря. Принцип преобразования иллюстрируется на рис. 2.24.
Вращательный двигатель (рис. 2.24, а) кольцевой структуры можно условно разрезать по плоскости А и развернуть кольцо в плоскость (рис. 2.24, б).
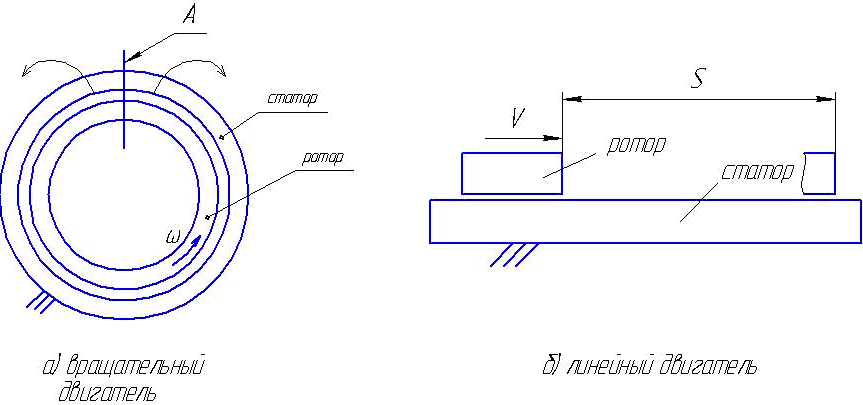
Рис. 2.24. Принцип преобразования вращательного двигателя (а)
в поступательный (б)
Такой двигатель будет иметь ограниченное перемещение S и ограниченную переменную скорость V, поскольку большую скорость на небольшом перемещении получить невозможно. Электромагнитные силы F также ограничены, как и во вращательных машинах. Поэтому линейные двигатели не могут иметь большую мощность P= F×V.
Вместе с тем они перспективны, так как позволяют отказаться в приводах от механизмов преобразования вращательного движения в поступательное. В настоящее время форсированные по усилию линейные двигатели применяются в быстродействующих приводах станков, роботов и других машин. Форсирование осуществляется, в основном, применением «сильных» магнитов (высокая магнитная индукция В) и многократным увеличением силы тока в проводах при условии эффективного охлаждения, вплоть до охлаждения жидким азотом. Сложность и, соответственно, стоимость линейных двигателей существенно выше, чем у вращательных машин, особенно если они оснащены собственными поступательными опорами и направляющими.







