Если жестко соединить исполнительное звено привода, имеющее собственные опоры, и шток пневмоцилиндра, также имеющий собственные опоры, то (при всегда существующей непараллельности перемещений исполнительного звена и штока пневмоцилиндра) в опорах и того и другого возникнут дополнительные реакции аналогично реакциям, возникающим при соединении несоосных валов. Значительные реакции вызывают нестабильное трение, интенсивный износ направляющих и опор и, в худшем случае, потерю подвижности в опорах. Могут быть три способа уменьшения реакций в опорах.
Способ 1. Между штоком и исполнительным звеном должно быть установлено устройство, компенсирующее непараллельность движений. Существуют разные конструкции таких устройств-развязок, например, устройство на основе шарового шарнира и ползуна (рис. 4.15).

Рис. 4.15. Соединение штока пневмоцилиндра с исполнительным звеном:
1 – ползун; 2 – шаровой шарнир;
e – линейное смещение, е = var; α – угловое смещение, α= var
Способ 2. Путем точного изготовления деталей привода и (или) путем регулировок добиваются достаточно высокой параллельности движений штока и исполнительного звена; при этом реакции в опорах сводятся к минимуму.
Способ 3. Шток соединяют с исполнительным звеном шаровым или обычным шарниром (рис. 4.16), корпус цилиндра соединяют с неподвижной стойкой шаровым или обычным шарниром.
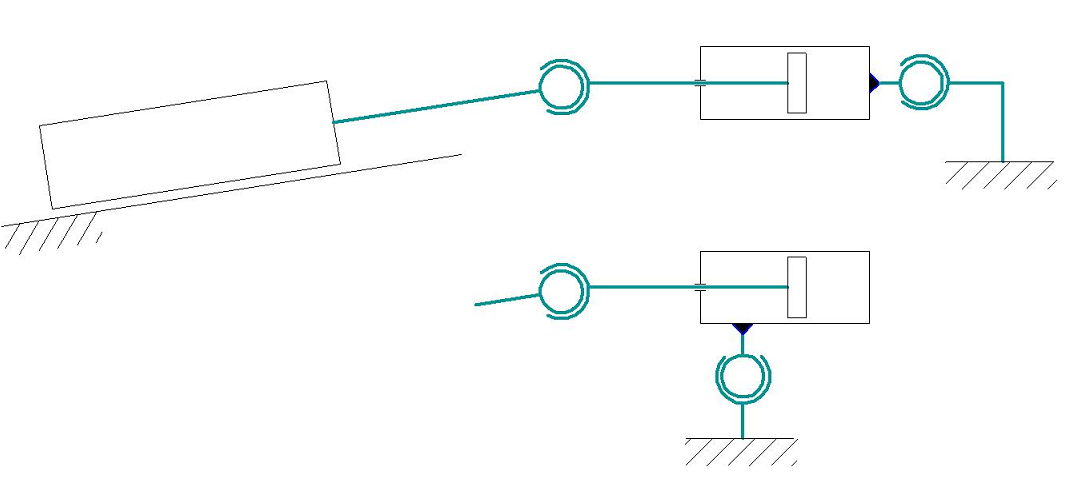
Рис. 4.16. Качающийся цилиндр с шаровым шарниром:
а – в торце цилиндра; б – на гильзе цилиндра
В результате получают качающийся цилиндр. Шаровой шарнир цилиндра помещают в торце цилиндра или на гильзе цилиндра. Способ 3 имеет преимущественное распространение.
Выбор пневмодвигателя
При выборе любого двигателя надо помнить, что действие равно противодействию. Поэтому усилие, развиваемое двигателем, всегда равно сопротивлению присоединенного к двигателю устройства, оно не зависит от размеров двигателя, его мощности и номинального усилия, записанных в каталоге двигателей.
При выборе пневмоцилиндра прежде всего определяется внешнее усилие, преодолеваемое штоком цилиндра на прямом ходе
 (4.6)
(4.6)
где  – приведенные к штоку цилиндра на прямом ходе усилия нагрузки: технологическое, трения, возвратной пружины (если она есть, иначе
– приведенные к штоку цилиндра на прямом ходе усилия нагрузки: технологическое, трения, возвратной пружины (если она есть, иначе  ).
).
Минимальное усилие цилиндра
 (4.7)
(4.7)
где hц – коэффициент, учитывающий силы трения внутри цилиндра, hц = 0,90…0,95.
Минимальная рабочая площадь цилиндра
 (4.8)
(4.8)
где p – давление сжатого воздуха.
Соответственно диаметр поршня
 (4.9)
(4.9)
Полученный диаметр поршня следует округлить до ближайшего большего из стандартного ряда 8, 10, 12…320 мм, затем по каталогу выбрать цилиндр нужного диаметра и с нужным ходом. Если требуется точное регулирование скорости и (или) нагрузка меняется в широких пределах, следует вычислить коэффициент нагрузки L 0, который характеризует запас по усилию пневмоцилиндра
 (4.10)
(4.10)
где F т – теоретическое усилие цилиндра;
S – площадь поршня;
D – диаметр поршня выбранного цилиндра.
Если окажется, что L 0 ³ 0,5…0,7, диаметр поршня следует увеличить.
При обратном ходе поршня внешнее усилие
 (4.11)
(4.11)
где  - усилия нагрузки при обратном ходе.
- усилия нагрузки при обратном ходе.
При расчете диаметра поршня следует учитывать, что в двухстороннем цилиндре рабочая площадь поршня в штоковой полости
 (4.12)
(4.12)
где d – диаметр штока.
При выборе поворотного привода со встроенной зубчатой рейкой и шестерней (рис. 4.4) внешний момент, преодолеваемый приводом
 (4.13)
(4.13)
где  – приведенные к валу привода моменты нагрузки: технологической и трения.
– приведенные к валу привода моменты нагрузки: технологической и трения.
Минимальный момент на валу привода
 (4.14)
(4.14)
По этому моменту при известном или заданном давлении сжатого воздуха, приведенному моменту инерции нагрузки и желаемому времени поворота вала привода на заданный угол можно выбрать поворотный привод..
Минимальная рабочая площадь S min и диаметр D min цилиндра привода
 (4.15)
(4.15)
где r – радиус шестерни.
Привод с поворотной лопастью выбирается аналогично приводу с механизмом рейка-шестерня.








