В двигателе постоянного тока много рамок, подобных той, что изображена на рис. 2.4. Каждая рамка представляет собой обмотку, состоящую из нескольких витков (рис. 2.5).

Рис. 2.5. Рамка с током в двигателе постоянного тока:
а, б – контактные пластины коллектора;
1 – коллектор; 2 – щетка; 3 – пружина; 4 – нерабочая часть обмотки
Обмотка рамки имеет активную рабочую часть на длине l – эточасть обмотки, которую пронизывает магнитный поток, и лобовые, не рабочие части 4. Концы обмотки присоединены к контактным пластинам a и б коллектора. Число пластин коллектора соответствует числу рамок на роторе (якоре) двигателя. К коллектору пружинами 3 прижимаются щетки 2. К щеткам подводится ток от источника постоянного тока. Набор щеток образует щеточный аппарат.
Момент, развиваемый двигателем, равен
 (2.3)
(2.3)
где z 1 – число витков в одной рамке;
z 2 – число рамок;
z – число витков обмотки двигателя.
Фотография и схемы, поясняющие конструкцию ротора, приведены на рис. 2.6.

а

б в
Рис. 2.6. Ротор двигателя постоянного тока:
а – фотография; б – поперечное сечение; в – продольное сечение;
1 – коллектор; 2 – щеточный аппарат; 3 – задний щит; 4 – провода;
5 – пазы; 6 – ротор; 7 – магнитный поток; 8 – проводник; 9 – башмак;
10 – электромагнит; 11 – корпус; 12 – вал; 13 – подшипник;
14 – передний щит
Провода 4 обмоток уложены в пазы 5 ротора 6. Ротор выполнен из стали с хорошей магнитной проводимостью и фактически представляет собой магнитопровод. Магнитный поток 7 пронизывает проводники 8, проходит через ротор 6, стальные накладки (башмаки) 9, магниты или электромагниты 10 и замыкается по стальному корпусу 11. С целью уменьшения потерь потока (увеличения индукции В) участки с низкой магнитной проводимостью, например, воздушные зазоры, сводятся к минимуму.В продольном сечении (рис. 2.6, б) ротор 6 имеет вид цилиндра с пазами. Ротор и коллектор 1 посажены на вал 12. Вал опирается на подшипники 13, которые закреплены в гнездах переднего щита 14 и заднего щита 3. Щеточный аппарат 2 закреплен на заднем щите (иногда на переднем щите) с возможностью регулировки углового положения щеток относительно полюсов магнитов. Регулировка нужна для выведения щеток на электрическую нейтраль и предотвращения искрения в контакте щеток с коллектором. Корпус двигателя, круглой или квадратной формы, одновременно служит магнитопроводом.
2.2.2 Высокомоментные двигатели
Согласно формулам (2.2) и (2.3) момент, развиваемый двигателем, можно увеличить, увеличивая значения B, I, l, r, z.
Магнитная индукция В может быть увеличена при применении высокоэффективных, с большой энергией, постоянных магнитов из магнитотвердых ферритов, например, феррита стронция, кобальтосодержащих сплавов типа ЮНДК, редкоземельных сплавов типа Sm-Co, сплавов типа Nd-Fe-B, а также при применении “сильных” электромагнитов.
Количество магнитов в корпусе электродвигателя должно быть максимально большим (минимум свободного места), потери магнитного потока должны быть сведены к минимуму.
Ток I может быть увеличен при эффективном охлаждении двигателя, например с помощью водяной рубашки. Длина l рабочей части проводников может быть большой в “длинных” двигателях.
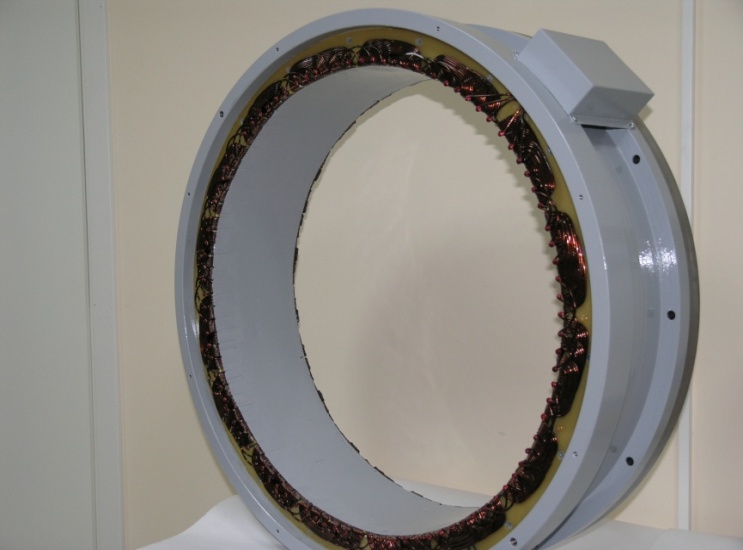
Увеличение радиуса r ротора достигается в двигателях большого диаметра, которые, как правило, имеют структуру кольца (рис. 2.7), не имеют собственного корпуса и подшипниковых опор и встраиваются в механизм.
В современной технике, особенно мобильной и ручной, любые электродвигатели, не только высокомоментные электродвигатели постоянного тока, часто встраиваются в механизм или механизм встраивается в двигатель. В этом случае конструкция получается компактной и легкой.
Рис. 2.7. Двигатель со структурой кольца:
а – ротор; б – статор; в – схема двигателя;
1 – статор; 2 – ротор; 3 – щеточный аппарат
Число проводников z увеличивают, делая пазы в роторе максимально большими по сечению. Ограничения диктуются прочностью ротора и потерями магнитного потока.
Малоинерционные двигатели
Рассмотрим в качестве примера структуру привода поступательно движущейся каретки (рис. 2.8).

Рис. 2.8. Структура привода поступательно движущейся каретки:
1 – ротор электродвигателя; 2 – соединительная муфта; 3 – шестерня с числом зубцов z 3; 4 – колесо с числом зубцов z 4; 5 – винтовой механизм;
6 – исполнительное звено – каретка
При быстром разгоне (разгон с большим ускорением) момент двигателя тратится, в основном, на преодоление инерции всех подвижных элементов

где J пр – приведенный к валу двигателя момент инерции системы;
e – угловое ускорение вала двигателя.
Приведенный к валу двигателя момент инерции механизма (без учета инерции валов, винта и зубчатых колес) будет равен
 (2.4)
(2.4)
где u 1 – передаточное число зубчатой пары 3-4, u 1 = z 4/ z 3;
u 2 – передаточное число пары винт-гайка, u 2 = φ /s;
φ– угол поворота винта;
s – перемещение каретки (гайки); при φ = 2πи однозаходном винте с шагом t: s = t, u 2 = 2p /t (рад/м);
m 6 – масса каретки;
J1 и J 2– моменты инерции ротора 1 двигателя и муфты 2 соответственно.
Понятия приведенный момент инерции J пр и приведенная масса m пр - одни из главных в механике.Ониопределяются исходя из баланса кинетической энергии звеньев механизма. Например, если звено движется поступательно, его кинетическая энергия Т п = mV 2/2. Кинетическая энергия этого звена, приведенная к вращающемуся валу, Т в = J прw2/2. Приравнивая Т в = Т п, получим J пр = mV 2/w2= m/u 2, где u - передаточное отношение механизма, передающего движение от звена, движущегося поступательно, к вращающемуся валу.
Анализируя формулу (2.4), видим, что хотя масса ротора много меньше массы каретки, ротор (по сравнению с кареткой) может оказывать большее влияние на приведенный момент инерции механизма.
В быстродействующих устройствах с большим угловым ускорением ε приведенный момент инерции J пр должен быть сведен к минимуму, что достигается, в частности, применением малоинерционных двигателей.
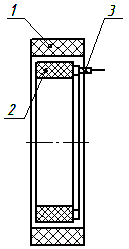
Двигатели с малым моментом инерции ротора строятся по трем основным схемам (рис. 2.9): с цилиндрическим полым ротором, с дисковым ротором, с ротором малого диаметра.
Ротор в виде тонкостенной цилиндрической оболочки 1 (рис. 2.9, а) изготавливается, например, из стеклопластика, провода обмотки ротора заливают в тело оболочки. Внутренний магнитопровод 2 неподвижен (в отличие от вращающегося магнитопровода 6 на рис. 2.6, б). Вследствие малой массы ротор имеет небольшой момент инерции.

Рис. 2.9. Малоинерционные двигатели:
а – двигатель с цилиндрическим полым ротором; б – двигатель с дисковым ротором; в – двигатель с ротором малого диаметра
1 – оболочка; 2 – неподвижный магнитопровод; 3, 7 – ротор; 4 – магниты;
5 – подвижный магнитопровод; 6 – вращающийся магнитопровод
В двигателе с дисковым ротором (рис. 2.9, б) ротор 3 выполнен в виде тонкого диска. Провода обмоток заложены внутри диска. Все магниты 4 и магнитопровод 5 неподвижны. Коллектор 6 – торцевого типа. Ротор легкий, с малым моментом инерции.
В двигателе с ротором малого диаметра (рис. 2.9, в) ротор 7 выполнен в виде вала, на поверхности которого закреплены проводники обмотки. Вследствие малого диаметра ротор имеет небольшой момент инерции.