Описанная выше методика линейного статического расчета стержневых систем реализована в вычислительном комплексе ПРИНС. Упрощенная блок-схема алгоритма расчета приведена на рис.21.2.
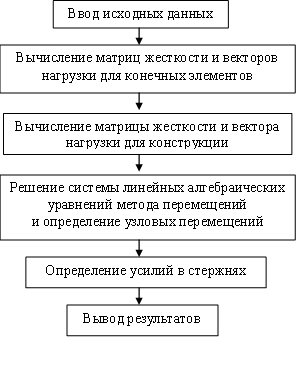
Рис.21.2. Блок-схема алгоритма расчета конструкции методом конечных элементов
Программа ПРИНС снабжена препроцессором, значительно облегчающим ввод исходных данных, а также постпроцессором, обеспечивающим рисование деформированной схемы конструкции и эпюр усилий в ее элементах.
Ниже приводятся результаты расчета стержневых конструкций методом перемещений по программе ПРИНС.
ЛЕКЦИЯ 22. ПРИМЕР РАСЧЕТА ФЕРМЫ МАТРИЧНЫМ СПОСОБОМ
Матрица жесткости стержня фермы в местной системе координат на основании общей формулы (20.7) имеет вид:
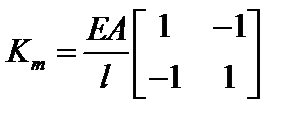
| (22.1)
|
Эта матрица связывает продольную силу на концах стержня с перемещениями этих концов в местной системе координат(рис.22.1):
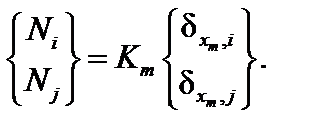
| (22.2)
|
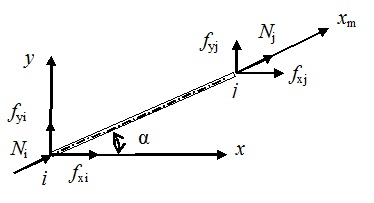
Рис.22.1. Усилия в стержне
Проекции концевых продольных сил стержня на глобальные оси легко найти по рис.22.1. Получаем:
В матричном виде эти формулы имеют вид:
| (22.3)
|
где  матрица направляющих косинусов, определяемая следующим образом:
матрица направляющих косинусов, определяемая следующим образом:
| (22.4)
|
С целью унификации расчетных формул запишем соотношение (22.4) в виде:
| (22.5)
|
где l и m - направляющие косинусы местной оси х m элемента в глобальных осях ХУ.
Используя приведенные формулы и описанный в лекции 21 алгоритм, рассчитаем ферму, приведенную на рис.22.2 при 
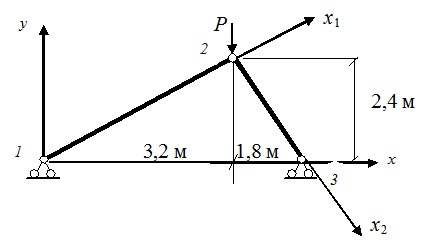
Рис.22.2. Расчетная схема фермы
Решение:
1. Пронумеруем узлы фермы, как показано на рис.22.2.
2. Выберем глобальную систему координат xy и местные оси элементов х 1 и х 2.
3. Пронумеруем степени свободы в узлах и результаты представим в виде матрицы ID:
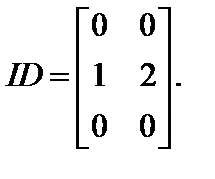
Первая строка этой матрицы соответствует узлу 1, вторая - узлу 2, и третья - узлу 3. Нули в этой матрице означают отсутствие перемещений по направлению глобальных осей Х (первый столбец) и У (второй столбец).
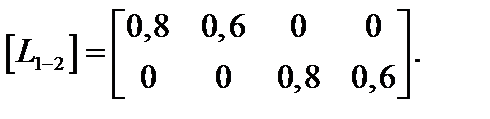
4. Находим направляющие косинусы местных осей элементов в глобальной системе координат.
Стержень 1-2: 
Матрица направляющих косинусов:
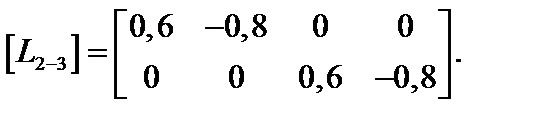
Стержень 2-3:

Матрица направляющих косинусов:
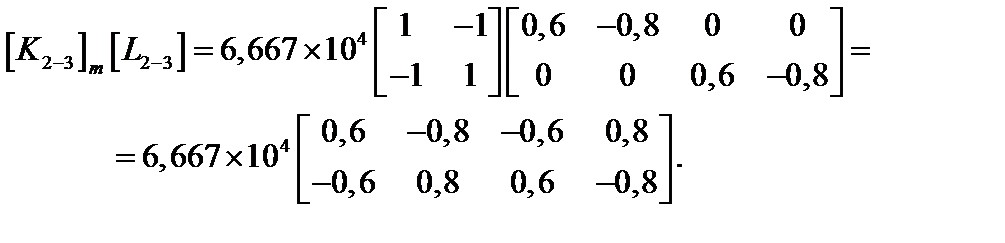
5. Вычисляем матрицы жесткости элементов в местных осях:


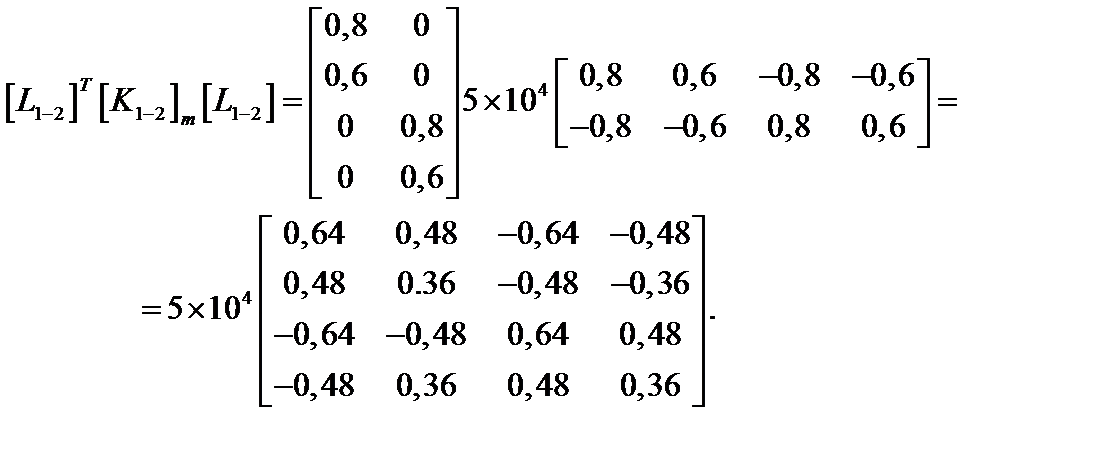
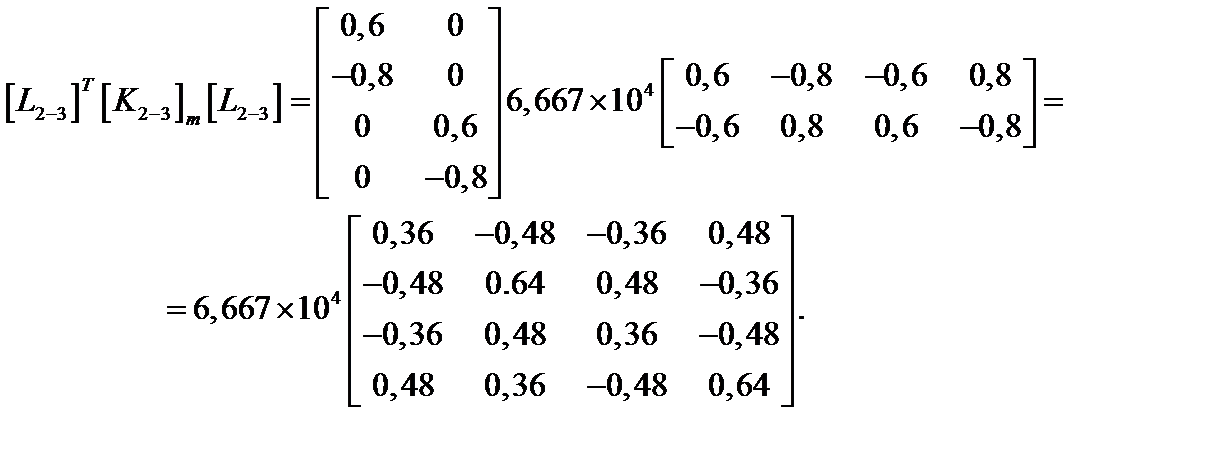
6. Вычисляем матрицы жесткости элементов в глобальной системе координат по формуле (21.12):

7.Вычисление матрицы жесткости конструкции.
Чтобы облегчить вычисление суммарной матрицы жесткости, пронумеруем степени свободы элементов матриц жесткости стержней, как схематично показано ниже:
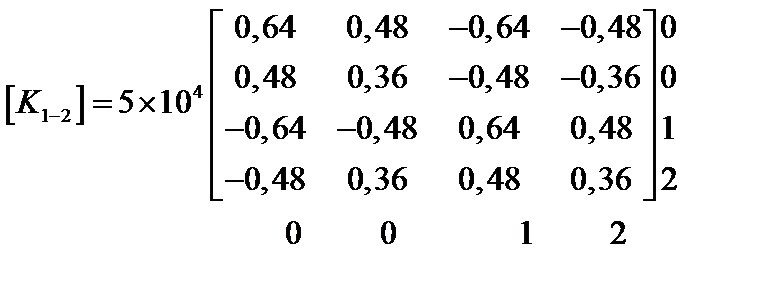
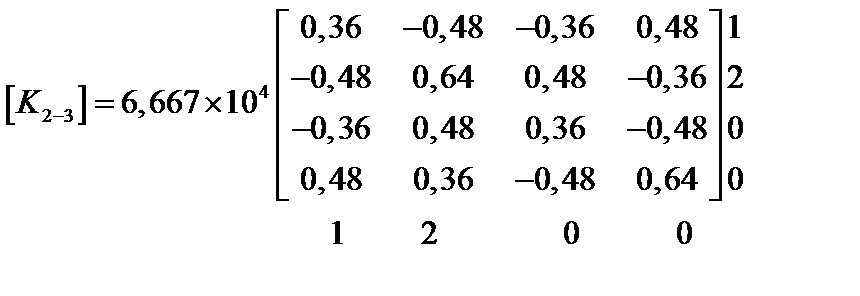
Так как конструкция имеет две степени свободы, матрица жесткости конструкции имеет порядок 2 × 2. Ее элементы получаются суммированием одноименных элементов матриц жесткости стержней 1-2 и 2-3. При этом нужно помнить, что матрица жесткости стержня 1-2 связана со степенями свободы узлов 1 и 2, а матрица жесткости стержня 2-3 — со степенями свободы узлов 2 и 3. Получаем:

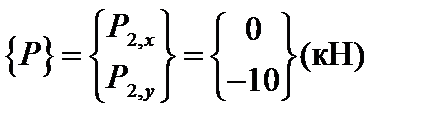
8.Составляем вектор внешних узловых сил:
9. Решаем систему уравнений:

Ответ:

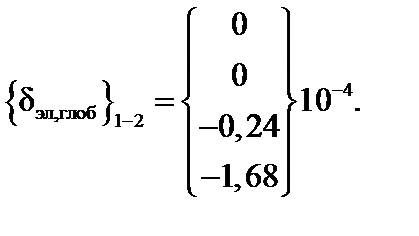
10. Находим усилия в стержнях.

Стержень 1-2:

Стержень 2-3:

Направления найденных усилий показаны на рис.22.3.
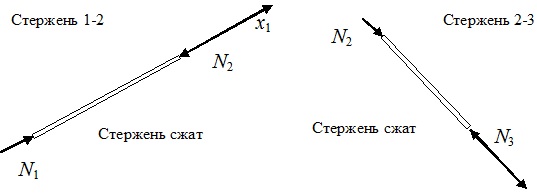
Рис.22.3. Усилия в стержнях фермы
Таким образом, в результате расчета матричным способом находятся как перемещения узлов, так и усилия в элементах.
ЛЕКЦИЯ 23. ПРИМЕР РАСЧЕТА РАМЫ МЕТОДОМ ПЕРЕМЕЩЕНИЙ ПО ПРОГРАММЕ ПРИНС
Для иллюстрации практической реализации метода перемещений в компьютерных программах рассмотрим пример расчета рамы с помощью вычислительного комплекса ПРИНС.
Рассчитывалась рама, изображенная на рис.23.1.
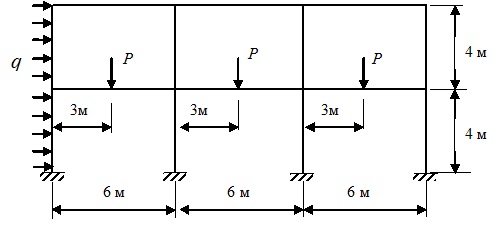
Рис.23.1. Рассчитываемая рама
Размеры и нагрузки рамы показаны на рис.23.1. Жесткость всех стержней принималась одинаковой. Рассмотрим основные этапы расчета конструкции.
1. Подготовка и ввод исходных данных.
1.1. Настройка среды подготовки данных.
При запуске программы ПРИНС на экране компьютера появляется главное окно, имеющее вид (рис.23.2,показана часть окна).

Рис.23.2. Часть главного окна программы ПРИНС
Следует активировать кнопку «Новый» и в открывшемся новом окне задать имя задачи.
Затем нужно активировать кнопку «Установки»; и в диалоговом окне «Основная система координат» (рис.23.3) выбрать систему координат, а в диалоговом окне «Размерности физических величин» (рис.23.4) — систему единиц измерений. В данном случае выбрана плоская система координат YZ и следующие единицы измерений: единица длины — м, единица силы — кН, размеры сечений — см, единица массы — кг.

Рис.23.3. Выбор системы координат
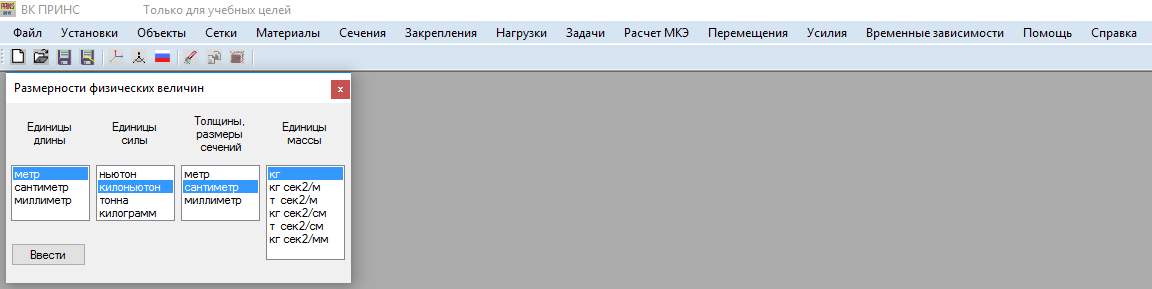
Рис.23.4. Выбор системы единиц измерения
1.2.Ввод геометрических примитивов для описания геометрии рамы.
Геометрию рамы можно описать с помощью двух линий: вертикальной с координатами (0,0) и (0,8) и горизонтальной с координатами (0,4) и (18,4).
Для этого нужно активировать кнопки «Объекты»-«Линии»-«Ввод» и в открывшемся окне «Ввод линий» (рис.23.5)ввести поочередно две линии с указанными координатами.
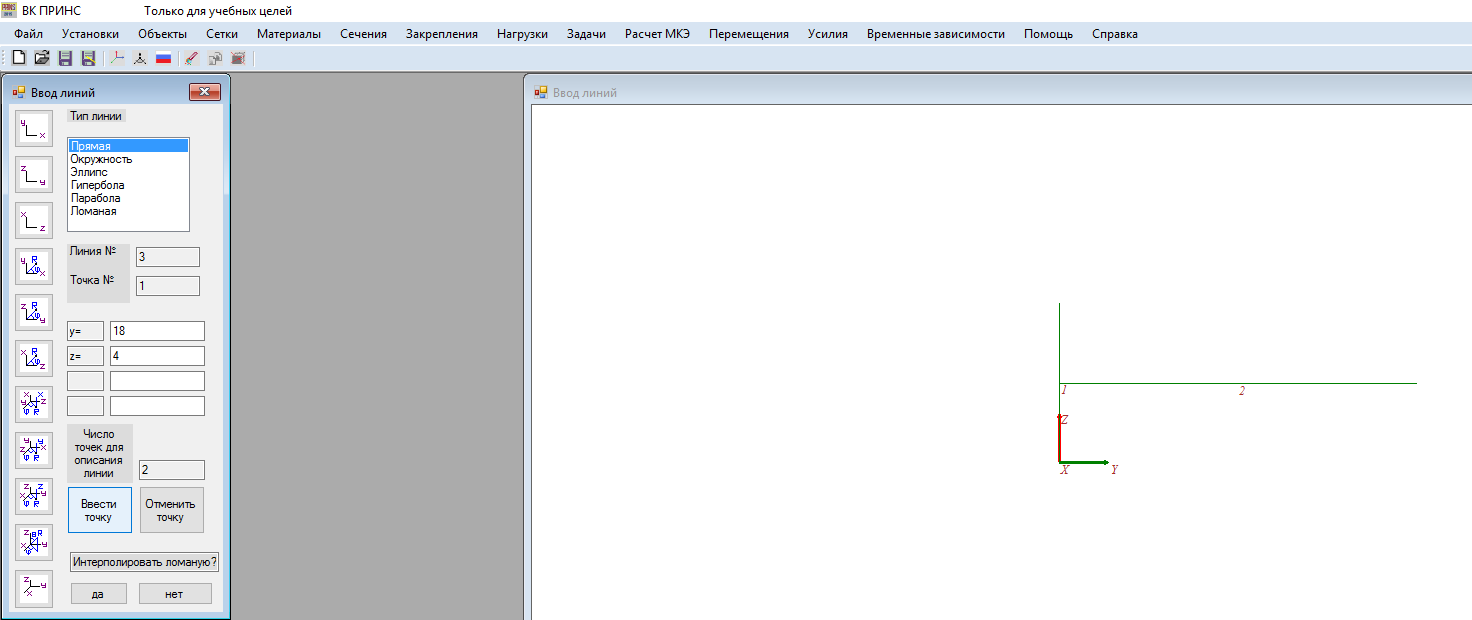
Рис.23.5. Ввод линий
1.3.Генерация расчетной схемы рамы.
Генерация расчетной схемы заключается в разбиении сгенерированных линий на отрезки, называемые конечными элементами, в результате чего образуются так называемые модули — совокупности или группы однотипных элементов, с последующим копированием этих модулей в случае необходимости.
Для генерации сетки нужно активировать кнопку «Сетки» главного меню и выбрать в выпадающем меню строку «Ввод». В появившемся после этого действия диалоговом окне нужно указать параметры сетки, выбрать тип конечного элемента (в нашем случае —BEAM32) и щелкнуть на клавише «Ввести» (рис.23.6).
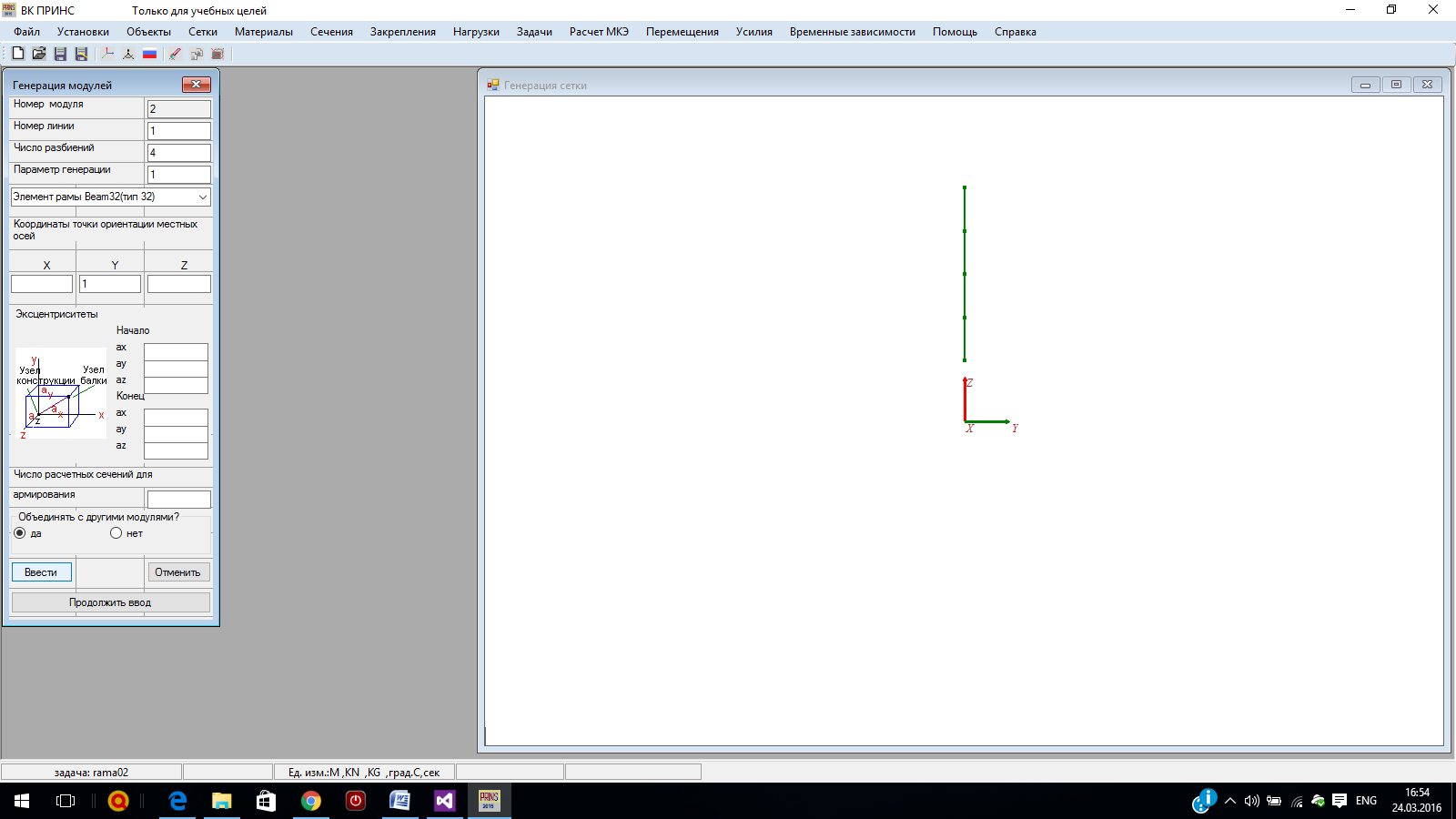
Рис.23.6. Генерация сетки конечных элементов на линии
В результате этих действий будет сгенерирован модуль, представляющий левую стойку рамы. Этот модуль средствами препроцессора можно скопировать с переносом по оси Y на расстояние, равное длине пролета (рис.23.7).
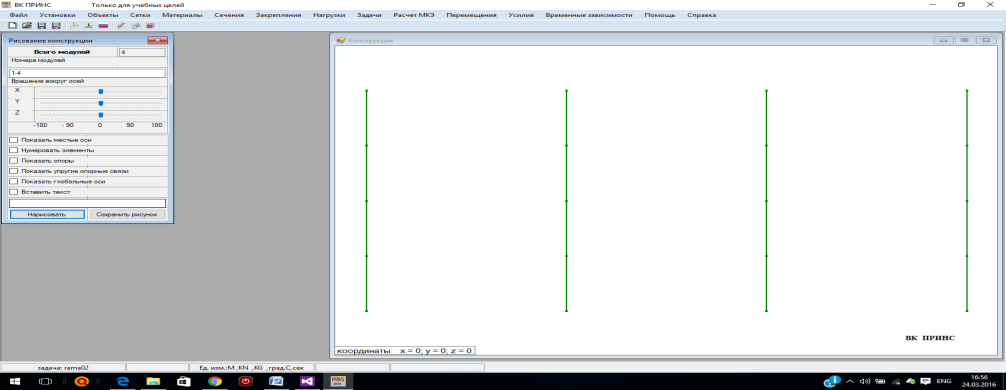
Рис.23.7. Копирование модулей
Аналогичным образом генерируется модуль, представляющий ригель первого этажа, который затем копируется на второй этаж. В результате получаем геометрическую модель рамы (рис.23.8).
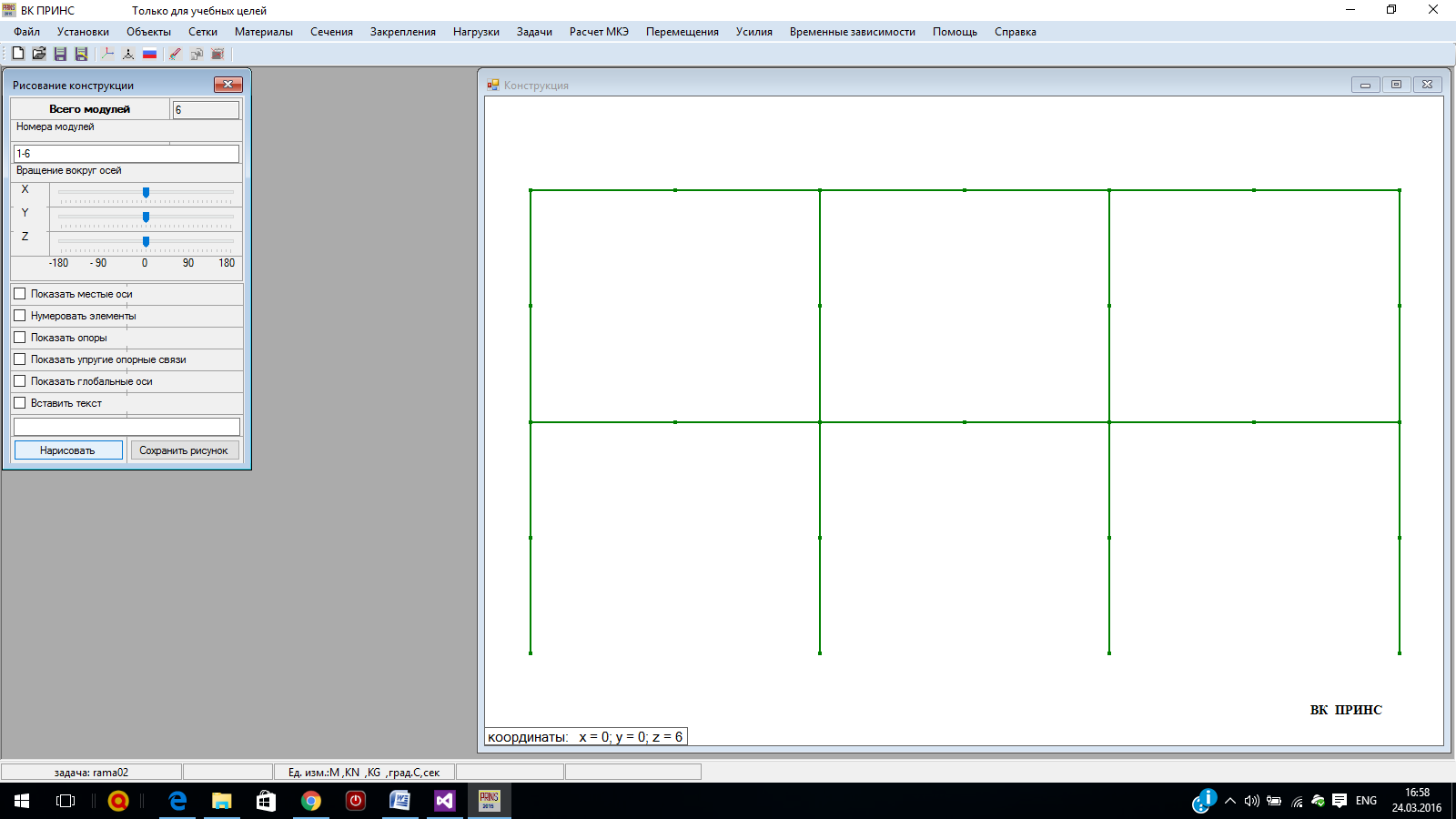
Рис.23.8. Геометрическая модель рамы
1.4. Ввод характеристик материалов.
Свойства материалов вводятся с помощью специального диалогового окна (рис.23.9).
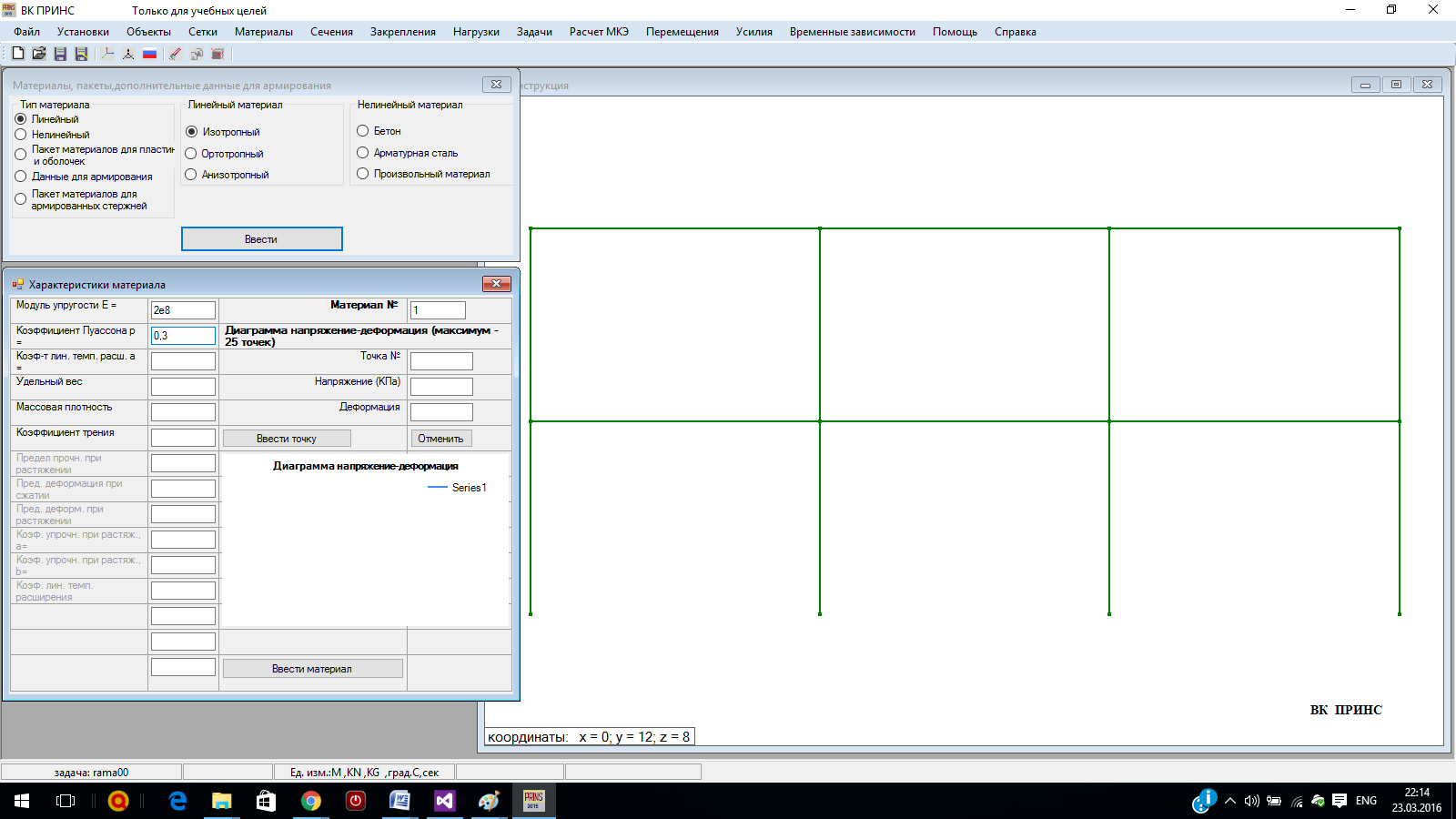
Рис.23.9. Ввод материалов
1.5. Свойства сечений.
Свойства сечений также вводятся с помощью специального окна. Имеется возможность задавать сечения различной формы, стандартные профили, а также произвольные сечения с заданными в числовом виде характеристиками (рис.23.10).
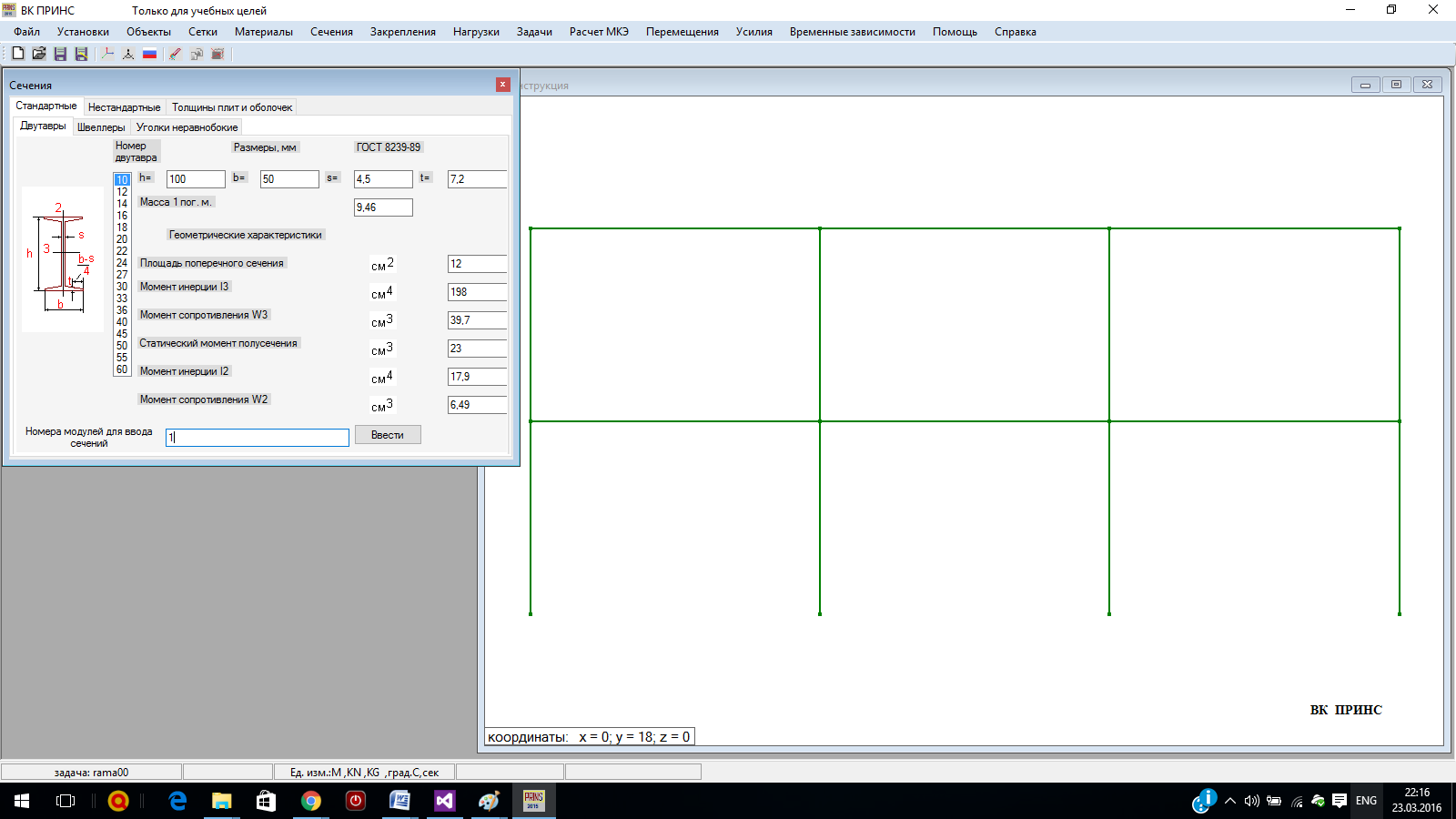
Рис.23.10. Задание свойств сечений
1.6. Кинематические граничные условия.
Кинематические граничные условия во входном файле для расчета конструкции представляются шестью одноразрядными двоичными числами, причем 0 соответствует разрешению, а 1 — запрету перемещения. При вводе граничных условий с помощью препроцессора эти коды представляются цветами — зеленым и красным, соответственно (рис.23.11).
Отдельно вводятся коды граничных условий для всех узлов конструкции и для узлов, лежащих на внешнем контуре (опорных узлов).
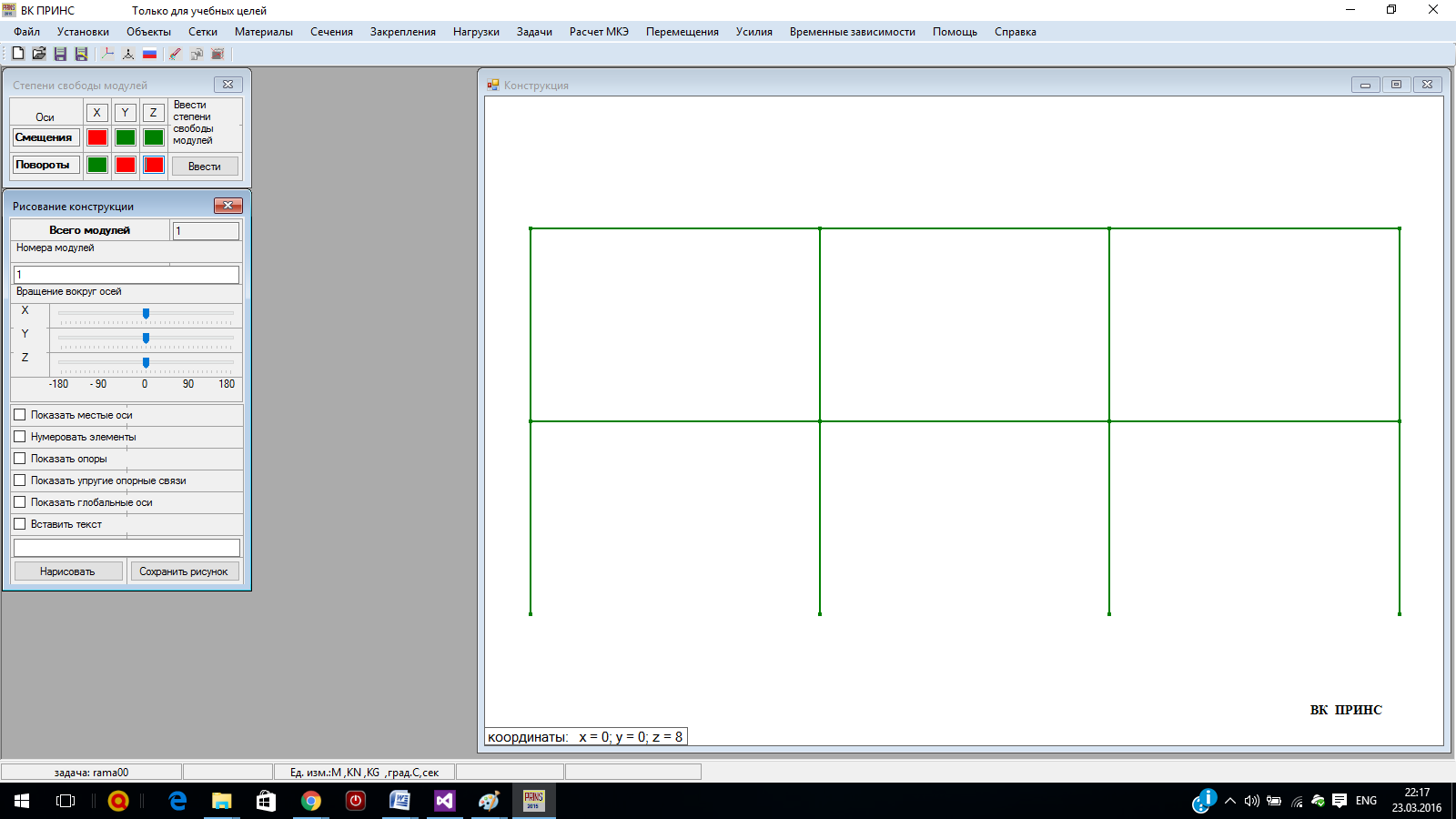
Рис.23.11.Задание кинематических граничных условий
1.7. Ввод нагрузок
Нагрузки на стержневые системы делятся на две категории — пролетные (рис.23.13) и узловые (рис.23.12).
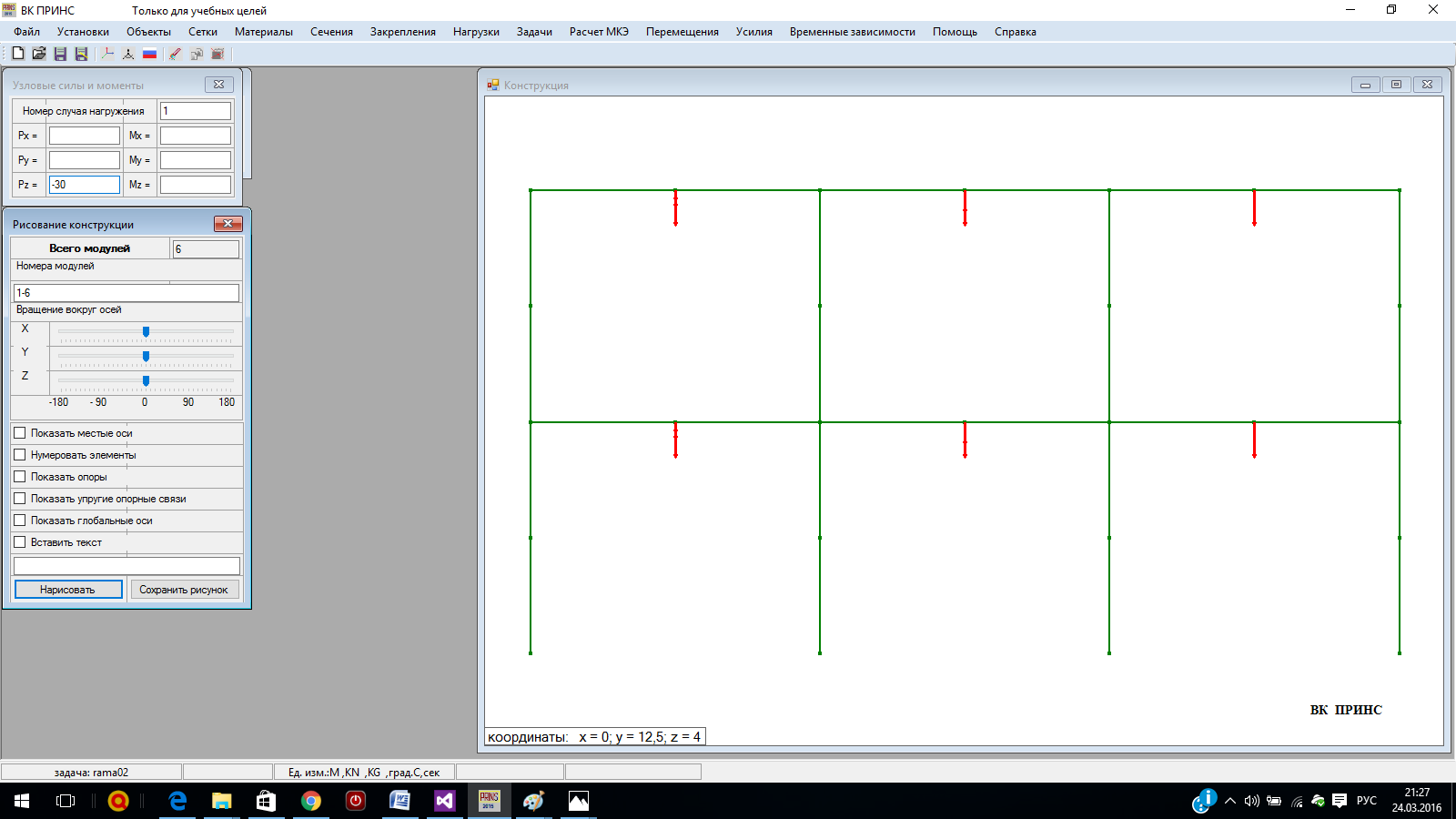
Рис.23.12. Ввод узловых нагрузок
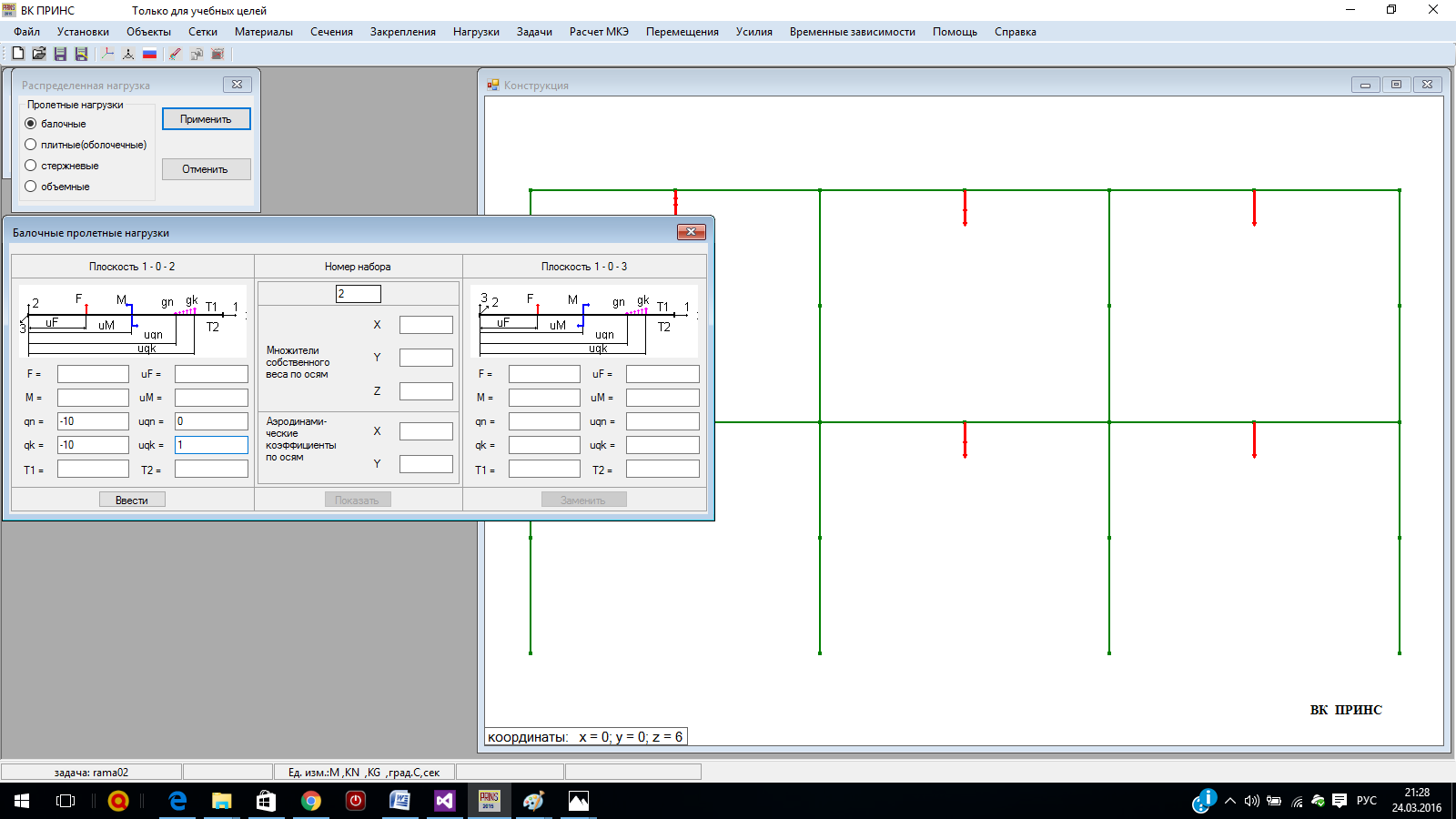
Рис.23.13. Ввод пролетных нагрузок
1.8. Формирование входного файла
Введенные на предварительных этапах данные с помощью специальной программы объединяются в один числовой файл, подготовленный в форматах программы расчета конструкции методом конечных элементов.
2.Решение задачи методом конечных элементов.
Расчет конструкции осуществляется щелчком на кнопке «Расчет МКЭ» и не требует вмешательства пользователя.
3.Анализ результатов.
Результаты расчетов представляются в наглядной форме либо в виде эпюр, полей напряжений и числовых таблиц.
В данном случае интерес представляют эпюры изгибающих моментов (рис.23.14), поперечных (рис.23.15) ипродольных(рис.23.16) сил.
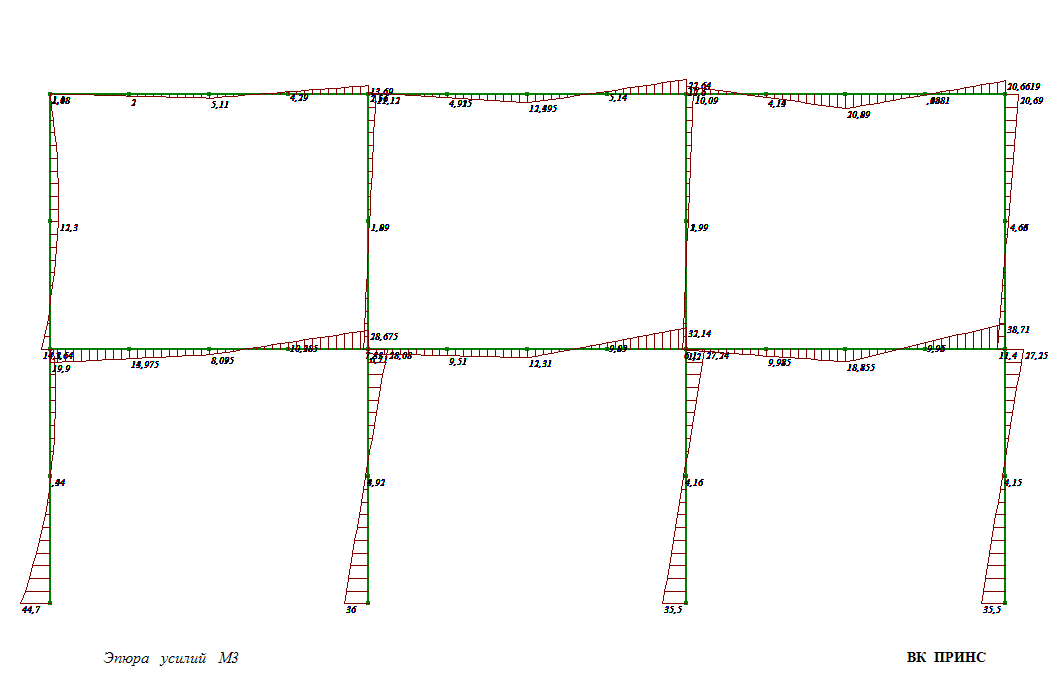
Рис.23.14. Эпюра изгибающих моментов
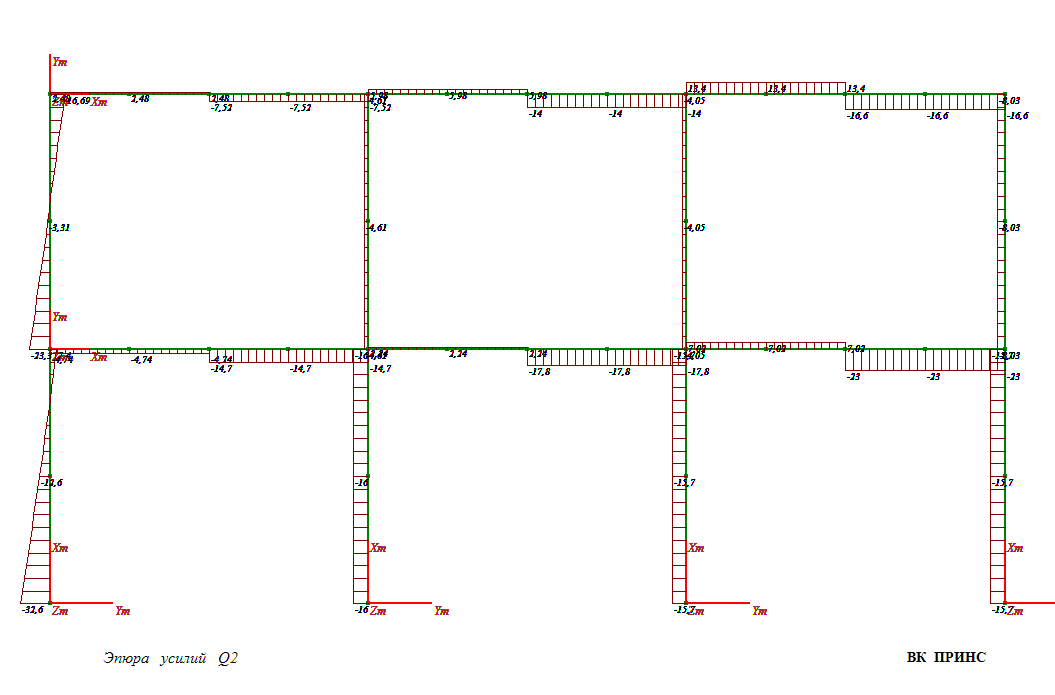
Рис.23.15. Эпюра поперечных сил
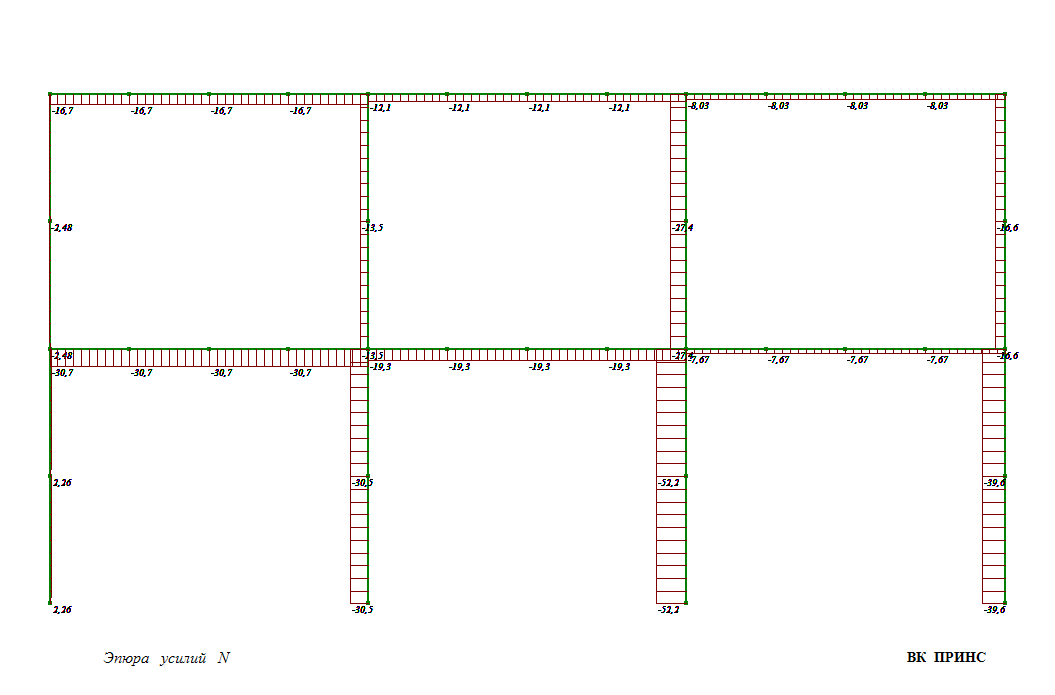
Рис.23.16.Эпюра продольных сил
Таким образом, современные компьютерные программы являются удобным инструментом исследования напряженно-деформированного состояния стержневых систем.
Список рекомендуемой литературы
1) Леонтьев Н.Н и др. Основы строительной механики стержневых систем. М.: АСВ, 1996. 541 с.
2) Анохин Н.Н. Строительная механика в примерах и задачах. В 2-х частях. М.: АСВ, 1999.-Ч.1-334 с.- Ч.2.- 464 с.
3) Дарков А.В. Строительная механика. М.: Изд-во «Высшая школа», 1976. 600 с.
4) Агапов В.П. и др. Строительная механика автомобиля и трактора. М.: МГТУ «МАМИ», 2002. 397 с.
5)Агапов В.П. Метод конечных элементов в статике, динамике и устойчивости конструкций. М.: Изд-во АСВ, 2004. 247 с.








