

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
Топ:
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного хозяйства...
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Основные технические данные робота представлены в табл. 13.
Таблица 13
Основные технические данные
| Емкость магазина, шт. | 20 |
| Грузоподъемность, кг, не более | 0,15 |
| Диаметр загружаемых заготовок, мм наибольший наименьший | 60 5 |
| Длина загружаемых заготовок, мм наибольшая наименьшая | 40 4 |
| Продолжительность цикла выгрузки-загрузки, с, не более | 22 |
| Точность позиционирования, мм | ±0,1 |
Приводами для перемещения исполнительных механизмов робота служат пневмоцилиндры.
Поворот кронштейна с закрепленной на нем головкой с приводом на 100° в горизонтальной плоскости к магазину и от магазина осуществляется от пневмоцилиндра Ц6 через шток-рейку 1 и шестерню 2, жестко установленную на валу 1 (рис. 38).
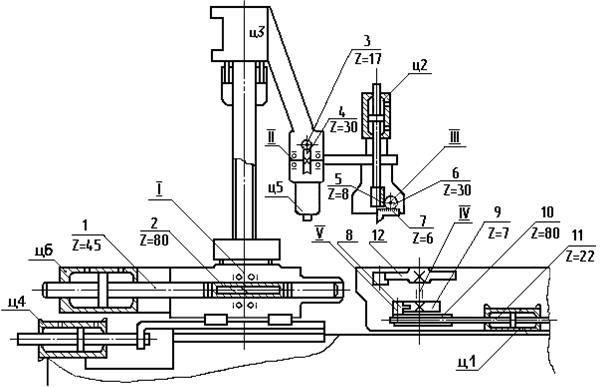
Рис.38. Структурная схема работа
Поворот головки с приводом на 90° обеспечивается двумя односторонними пневмоцилиндрами Ц5 через общую для обоих цилиндров шток-рейку 3 и шестерню 4, посаженную на шпонке на вал II.
Перемещение кулачков головки обеспечивается пневмоцилиндром Ц2 и пружиной от трехсторонней рейки 5, секторов 6, свободно сидящих на осях III, и ползунов 7, на которых крепятся кулачки.
Перемещение спутников в желобе магазина происходит от пневмоцилиндра I через шток-рейку 11, сцепленную со свободно посаженым на вале IV сектором 10, собачку 8, подвижно установленную на оси V сектора. Собачка при выдвижении шток-рейки сцепляется с храповиком 9, установленным на шпонке вала IV и поворачивает на 1/7 оборота звездочку 12, которая перемещает спутники.
Головка с приводом (рис. 39) служит для удержания заготовки при транспортировании ее из магазина в патрон, а также обработанной детали из патрона в магазин.
|
|
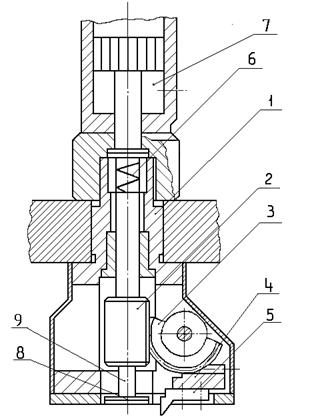
Рис. 39. Головка робота с приводом
Робот снабжен двумя сменными головками, которые обеспечивают зажим заготовок диаметром от 5 до 60 мм. Головка № 1 установлена на роботе и обеспечивает зажим за наружный диаметр от 5 до 24 мм, а при установке сменных кулачков от 22 до 42 мм; головка № 2 обеспечивает зажим от 40 до 60 мм, а при установке сменных кулачков – за внутренний диаметр в пределах от 30 до 50 мм. Диапазон диаметров обеспечивается за счет перестановки кулачков на один зуб.
В корпусе 1 каждой головки по трем радиальным пазам от вала-рейки 2 через зубчатые секторы 3 перемещаются ползуны 4, в пазах которых крепятся кулачки 5.
Зажим за наружный диаметр осуществляется от пружины 6. Усилие зажима на каждом кулачке колеблется от 5 до 10 Н. Разжим кулачков осуществляется от пневмоцилиндра.
Зажим за внутренний диаметр осуществляется от пневмоцилиндра, а разжим – от пружины 6.
Кронштейн с пневмоцилиндрами перемещается в вертикальной плоскости по направляющим механизма поворота с приводом (рис. 40), который обеспечивает поворот кронштейна с закрепленной в нем головкой в горизонтальной плоскости на 100° к магазину и обратно. В корпусе 2 механизма поворота на оси 3 жестко посажена шестерня 4, которая от штока-рейки 5 пневмоцилиндра 6 поворачивает закрепленную на оси траверсу 7 с запрессованными в нее направляющими 1.
Рис. 40. Механизм поворота робота
Механизм поворота устанавливается на каретке, которая перемещается от пневмоцилиндра по шариковым направляющим параллельно оси шпинделя станка.
Пневмоцилиндры кронштейна и механизма поворота выполнены с торможением скорости в конце хода.
Пневмооборудование
Пневмооборудование (рис. 41) состоит из трех взаимосвязанных систем:
– подготовки воздуха;
– револьверной головки и кулачкового патрона;
– робота.


Рис. 41. Пневмооборудование
Воздух от цеховой пневмосети через кран проходной ВН1 поступает во влагоотделитель ВД1, маслораспылитель МР1 и через пневмоклапан КР1 в аккумулятор РС2, а затем к электропневматическим клапанам К1-К10.
|
|
Автоматическая работа исполнительных механизмов робота внутри цикла обеспечивается установкой в пневматической схеме датчиков перепада давления КД1 и КД2.
Ресивер (аккумулятор) PC1 установлен для обеспечения поддержания требуемого давления воздуха при включении цилиндра Ц2 в работу.
Ресивер РС2 служит для стабилизации работы пневмосистемы при колебаниях воздуха в подводимой магистрали.
Обратные клапаны К01 и К02 предохраняют цилиндры Ц2 и Ц7 от попадания в них воздуха при соединении полостей цилиндра Ц3 с атмосферой через глушитель Г1.
Дроссели ДР1-ДР8 регулируют скорости перемещения штоков соответствующих пневмоцилиндров.
Регулировка давления воздуха в сети производится с помощью редукционных клапанов КP1 и КР2. Контроль давления осуществляется манометрами MH1 и МН2.
В пневмосети имеется реле давления РД1, настроенное на давление 0,4 МПа. При меньшем давлении станок выключается, прекращая работу. Воздух поступает в пневмосистему робота через редукционный клапан КР-2 и пневмоклапан К2 – в систему разжима и зажима пневмопатрона. На станке с пневмопатроном при включении кнопки «Зажим» воздух поступает в поршневую полость патрона Ц7. Реле давления РД2 подготавливает включение главного привода.
Управление системой зажима планшайбы револьверной головки A1 производится воздухораспределителем P1, установленным в блоке подготовки воздуха. Через воздухораспределитель P1 по каналам 43 и 44 воздух поступает в нижнюю или верхнюю полость пневмоцилиндра револьверной головки A1, что обеспечивает зажим и разжим планшайбы по команде программоносителя при смене позиции револьверной головки. В автоматическом цикле управление электромагнитом УА1 воздухораспределителя осуществляется от технологической команды на поворот револьверной головки, а в наладочном режиме – от кнопки.
Давление воздуха для функционирования системы «станок-робот» должно быть отрегулировано редукционным клапаном КP1 в пределах 0,4-0,6 МПа.
Пневмоцилиндрами Ц1-Ц7 управляют электропневматические клапаны К1-К12.
Работа цилиндров Ц5 и Ц6 – поворот на 90° и 100° – совмещена.
Пневмоцилиндры Ц1-Ц7 подключены таким образом, что при обесточенных электромагнитах КV1-КV11, КV16 клапанов К1-К12 робот занимает исходное положение.
|
|
Пневмораспределители РП1,2 установлены для обеспечения цикла работы при захвате обрабатываемой детали кулачками. Рукоятки РП1, РП2 необходимо перевести в другое положение.
|
|
|

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!