| Обслуживание кузнечно-штамповочного производства
| 25%
|
| Обслуживание станков
| 20%
|
| Обслуживание печей
| 10%
|
| Окраска и нанесение защитных покрытий
| 13%
|
| Сварка
| 11%
|
| Транспортные и складские работы
| 10%
|
| Сборка
| 6%
|
| Прочие работы
| 5%
|
Таблица 9
Распределение промышленных роботов по отраслям
| Отрасль промышленности
| %
|
| Автомобильная
| 38
|
| Электротехническая
| 18
|
| Производство пластмасс
| 11
|
| Обработка металлов
| 8
|
| Металлургия
| 7
|
| Текстильное производство
| 3
|
| Точное машиностроение
| 3
|
| Прочие отрасли
| 12
|
Основные понятия
Промышленный робот – перепрограммируемый автоматический манипулятор промышленного применения. Характерными признаками промышленных роботов являются автоматическое управление, способность к быстрому и относительно легкому перепрограммированию, способность к выполнению трудовых действий. Он относится к обширному классу машин, оснащаемых манипуляторами.
Манипулятор – устройство, предназначенное для имитации двигательных и (или) рабочих функций руки человека и управляемое оператором или действующее автоматически.
Объектом манипулирования называют тело, перемещаемое в пространстве манипулятором. К объектам манипулирования относятся заготовки, детали, захватные устройства, вспомогательный, мерительный или обрабатывающий инструмент и т.п.
По методу управления все манипуляторы можно разделить на биотехнические (с ручным управлением), интерактивные (со смешанным управлением) и автоматические.
В состав структурной схемы манипулятора (ГОСТ 21024-75) входят следующие элементы:
- задающий орган – функциональная часть манипулятора, предназначенная для создания управляющих сигналов и движений;
- исполнительный орган – его функциональная часть, предназначенная для выполнения действий по сигналам и движениям, поступающим от задающего органа;
- связующий орган – предназначен для передачи сигналов и движений от задающего органа;
- рабочий орган – часть исполнительного органа, предназначенная для реализации технологического назначения манипулятора (выполняется в виде захватов, инструмента и т.п.);
- автооператор – неперепрограммируемый автоматический манипулятор.
К классу промышленных роботов относятся манипуляторы с интерактивным управлением. Интерактивный робот – попеременно управляемый оператором или действующий автоматически. В отличие от биотехнических интерактивные системы имеют устройства памяти для выполнения отдельных действий. В ГОСТ 25686-83 «Роботы промышленные. Термины и определения» дано более развернутое определение промышленного робота.
Промышленный робот – это автоматическая машина, представляющая собой манипулятор с перепрограммируемым устройством управления и предназначенная для выполнения в производственном процессе двигательных и управляющих функций, аналогичных функциям руки человека при перемещении предметов производства и (или) технологической оснастки.
Здесь важно обратить внимание на то, что, помимо двигательных, робот может выполнять и управляющие функции (например, при обслуживании нескольких станков он должен выполнять функции диспетчера: давать команду на открытие заграждения в станке при подходе робота для смены заготовки).
На рис. 15 представлена структура промышленного робота.
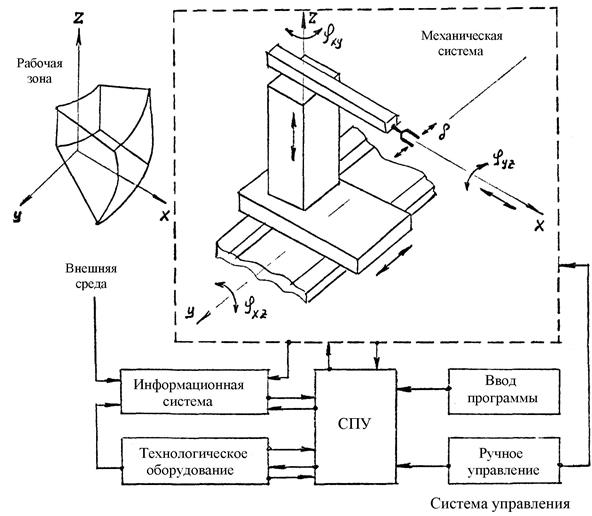
Рис. 15. Структура промышленного робота
В любой промышленный робот входят две основные системы: система программного управления (СПУ) и механическая система (МС).
Система программного управления предназначена для программирования, сохранения управляющей программы, ее воспроизведения и отработки. Она состоит из устройств:
– ввода управляющей программы;
– запоминающего (запись, хранение и выдача управляющей программы);
– хранения управляющей программы (запоминание, фиксация и длительное хранение на программоносителе);
– преобразующего (преобразование управляющей программы в вид, необходимый для управления силовым приводом);
– силового привода;
– обратной связи;
– сравнения (сравнение информации о состоянии внешней среды, параметрах функционирования робота от датчиков обратной связи и выработка сигнала ошибки на основании сравнения входного сигнала управляющей программы и сигнала от датчиков);
– управления (автоматическое управление работой всех частей СПУ в соответствии с заданным режимом и программой);
– пульта управления.
Управляющая программа может быть зафиксирована как с помощью механических аналогов (копиров, упоров) и различных коммутаторов (штекерных панелей, барабанов командоаппаратов), так и на быстросменных носителях (перфолентах, магнитных лентах, дисках).
В состав СПУ входит информационная система (ИС), которая обеспечивает сбор, первичную обработку и передачу в систему управления данных о функционировании узлов и механизмов (в том числе и блоков самой СПУ) и состоянии внешней среды. Она включает в себя устройство обратной связи, устройство сравнения сигналов, а также комплекс датчиков различного функционального назначения. Информационную систему по функциональному назначению условно можно разделить на три подсистемы:
1. Восприятия и переработки информации о внешней среде, в которой функционирует робот – контроль состояния объекта труда и обслуживаемого оборудования. Эта подсистема может быть разделена на дистантную (визуальную) и контактную (осязания).
2. Подсистему внутренней информации о состоянии узлов, механизмов и систем робота.
3. Подсистему обеспечения техники безопасности.
Механическая система обеспечивает выполнение двигательных функций и реализацию технологического назначения робота. Ее часто называют собственно манипулятором. Она представляет собой пространственный механизм с разомкнутой кинематической цепью. Конструктивно состоит из следующих основных узлов:
- несущих конструкций;
- приводов;
- передаточных механизмов;
- исполнительных механизмов;
- захватных устройств.
Исполнительный механизм – совокупность подвижно соединенных звеньев, предназначенных для воздействия на объект манипулирования или обрабатываемую среду. Исполнительный механизм, осуществляющий транспортирующее и ориентирующее движения, называют рукой робота. Если звенья исполнительного механизма соединены между собой только вращательными кинематическими парами, то в совокупности они образуют руку шарнирного типа.
Захватное устройство (схват) – узел механической системы робота, обеспечивающий захватывание и удержание в определенном положении объекта манипулирования. Схваты относятся к числу сменных элементов. Как правило, роботы комплектуют набором типовых схватов.
Соединение звеньев в кинематическую цепь осуществляется с помощью кинематических пар. Обозначения звеньев и кинематических пар приведены в ГОСТ 2.770-68.






