Даётся незнакомая программа на языке FBD, практически без описания. Требуется по программе восстановить алгоритм работы. Цель этого анализа программы: определить назначение и принцип работы неизвестной программы.
Первое шаг анализа. Распознают язык или языки программирования, разбираются в алгоритмах, на базе которых написана программа. Выявляют подпрограммы. Делают предположение о среде программирования и используемой библиотеки алгоритмов.
Второй шаг. Высказывается предположение об аппаратной части. Определяют модель контроллера, тип УСО, наличие приёма или выдачи информации по локальной сети (количество и типы сигналов), количество входных/выходных аналоговых сигналов, количество входных/выходных дискретных сигналов, что выдаётся на лицевую панель контроллера, вероятный обмен информацией с ПЭВМ, наличие резервных каналов, контроллеров.
Третий шаг: пытаются понять назначение программы, т.е. алгоритм её работы. Здесь важно найти сердце, основную суть. Ввод и вывод информации имеется практически у всех программ. Отображение – тоже мало, что даёт. Смотрим внимательно на программу и выявляем ту её часть, которая специфична для этой программы и, скорее всего, затрагивает её суть. Надо попытаться ухватить за кончик ниточки. Поймали, и давай разматывать. В это время ничто и никто не должен отвлекать: мысль мечется клочками в n-мерном измерении. Этот момент можно сравнить с разглядываем специфичных картин. Смотришь, и первое впечатление какая мазня. Вам дают понять: смотрите внимательнее и вглубь картины, не отвлекайтесь. И чудо, в мозгу что-то щёлкнуло, вы видите объёмное изображение плывущих дельфинов, прыгающих через обруч. Чуть отвлеклись, и опять мазня. Даже не вериться, что так может быть. К этому приёму прибегали творческие, гениальные люди. На лекции приводится пример n-мерной передачи информации в обычной картине В.М. Шукшина «Калина красная». И когда вы увидите то, что другие не видят или не хотят видеть, тогда и у вас в душе загорится творческий огонёк, который позволит легче и с интересом идти по лабиринтам чужой мысли, претворённой в программу.
Вернёмся к нашей программе (рис.45). Программа написана на языке функциональных алгоблоков (FBD) с помощью кросс-средства Редитор Р-130. Все алгоритмы из библиотеки алгоритмов контроллера Ремиконт Р-130, модель логическая [18; 47].
Почему мы решили, что модель логическая? Потому, что для отображения информации на ЛП контроллера используются два алгоритма: ОКЛ и ДИК, которые работают только с логической моделью [18; 47 или см. рис.Рисунок 17, с.45].
Что касается типа УСО, то используются два модуля: модуль МАС и МСД. Тип модуля МАС в контроллере Р-130 только один: 8AI/2AO и установлен он в группу А, т.к. в программе используется алгоритм ввода аналоговой информации с группы А: ВАА. Код модуля УСО по таблице типов УСО [47; 48] равен одному. Определим код МСД. Обычно число входных сигналов больше выходных. В программе опрашивают четыре дискретных канала, используют три (алгоритм ВДБ). Обязательно должны быть резервные входные и выходные каналы. Рассмотрим МСД с кодом 4: этот модуль имеет 4DI/12DO. Смотрим по программе число задействованных выходных каналов 4 (участвует алгоритм вывода четырёх дискретных сигналов — ДВБ). Если мы выберем этот модуль, то по входу имеем один резервный канал, а по выходу 8. Это не правильно. Если взять МСД с кодом 5, который имеет: 8DI/8DO. Этот модуль более подходит к нашей программе, на нём и остановимся. Что скучно? Инженерный труд – это не развлечение, а напряжённый, подчас монотонный, труд. Когда у Эдисона спросили насчёт творчества, он ответил примерно так: в моей работе 95% потения и 5% творения. Не унывать …. Таким образом, мы уже выяснили, что программа написана на языке FBD, для логической модели Ремиконта Р-130 с типом УСО равным 15. По локальной сети поступает три сигнала, об этом говорит использование алгоритма ВИН. В программе используется только один сигнал, приходящий по первому каналу алгоритма ВИН.
Переходим к самому интересному. Назначение программы. Как говорил Козьма Прутков[34]: «Смотри в корень!». Смотрим, в алгоблоке 24 используются три алгоритма НОР. Смотрим назначение и принцип работы алгоритма НОР [48; 39; 43]. На рисунке28 (с.53) представлена структура алгоблока с тремя алгоритмами НОР. НОР – нуль-орган, т.е. пороговый элемент. Поверяет входной сигнал или разность двух сигналов на принадлежность интервалу, ограниченному нижней границей (НГ) и верхней границей (ВГ). Каждый алгоритм имеет свой гистерезис. Проведя анализ применения алгоритма НОР в данной программе, с большой уверенностью можем сказать, что это программа технологической сигнализации. По первому входному дискретному каналу имеется защита от «дребезга» и случайного исчезновения сигнала: два таймера (алгоритмы ТМР, алгоблок 21 и 22) и один триггер (ТРИ, алгоблок 23). По второму аналоговому каналу имеется защита. Эта часть программы обведена штриховой линией. Остальные части программы соответствуют описанию работы программы сигнализации, представленной в данном пособии. Часть анализа опускаем (селективную фиксацию нарушений, просмотр предыстории нарушений по условию и ещё ряд интересных моментов.) Например, как осуществляется сброс звукового сигнала. В результате проведённого анализа приходим к выводу, что это программа сигнализации нарушений по двум дискретным и трём аналоговым каналам.
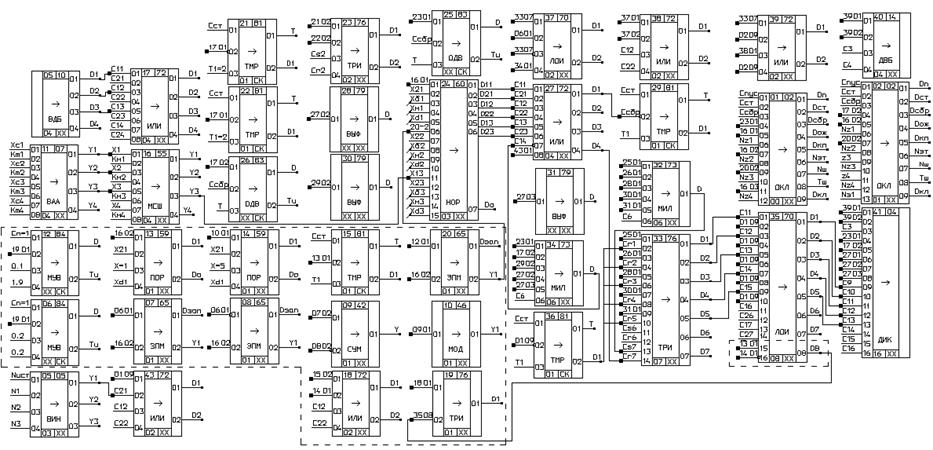
Рисунок 101 Программа для выполнения задания по обратному программированию
19 Контрольные вопросы
1. Назначение сигнализации в АСУ ТП.
2. Перечислите основные функции простого блока сигнализации.
3. Укажите недостатки простого блока сигнализации.
4. Поясните назначение алгоритма ОДВ в простом блоке сигнализации.
5. Как измениться работа блока сигнализации, если убрать алгоритм ОДВ?
6. Как измениться работа блока сигнализации, если не поставить инверсии во втором алгоритме И, на который поступает сигнал с триггера фиксации нарушения?
7. Перечислить функции интеллектуального блока сигнализации.
8. Пояснить особенности реализации интеллектуального блока сигнализации.
9. Как имитировать обрыв в первых трёх измерительных каналах на лабораторном стенде Р-130?
10. Какие сбои (ситуации) могут быть у дискретных сигналов?
11. Какие сбои или отказы (ситуации) могут быть у сигналов, поступающих по аналоговым каналам?
12. Что такое селективная фиксация нарушений?
13. Как осуществляется фиксирование нарушений по каналам, их просмотр и сброс?
14. Как можно одной кнопкой просмотреть предысторию нарушений и сбросить эту память?
15. Как осуществляется условный просмотр архива нарушений?
16. Что такое время реакции оператора?
17. Что такое время реакции системы?
18. Что такое активный режим блока сигнализации?
19. Как правильно задавать величину гистерезиса в алгоритме НОР?
20. Как будет работать сигнализация, если по аналоговым каналам гистерезис не задан?
21. Какие особенности формирования звуковой и световой сигнализации при прогнозе вероятного нарушения?
22. Что такое выдача предыстории нарушений по условию?
23. Функции режима «Совет оператору» в реализации алгоритма сигнализации.
24. Принцип построения и назначение математических моделей прогноза отказов оборудования?
25. Как и что имитируется с имитатора аналоговых и дискретных сигналов?
26. Почему следует реализовывать интеллектуальные блоки мажоритарного выбора?
27. Какие принципы построения АСУ ТП следует использовать при реализации алгоритма сигнализации?
28. Как сохранить, или заполнить предысторию нарушений?
29. Как вызывать предысторию нарушений по нажатию клавиши с лицевой панели. Т.е как выдать на индикацию (на лицевую панель логической модели) предысторию нарушений по условию?
30. Как сделать сброс предыстории нарушений автоматически через заданное время?
31. Поясните особенности реализации сигнализации в среде CoDeSys. Сравните используемые алгоритмы из библиотеки контроллера Р-130 и контроллера ПЛК-150.
32. Как реализуется алгоритм нуль-орган (НОР) или аналог этого алгоритма в контроллерах ПЛК-150, ПЛК-154?
33. Приведите технические характеристики контроллеров ПЛК-150, ПЛК-154.
34. Какие виды сигнализации вы знаете?
35. Чем отличается техническая от технологической сигнализации?
36. Что такое активный режим программы сигнализации?
37. Как выявить, что кто-то несанкционированно изменил программу и потом сам или через доброжелателей заявляет о сбое в программе сигнализации?
38. Какова структура программы сигнализации?
39. Почему установка предупредительных границ – некорректное решение о предупреждении нарушения?
40. Что такое объектно-привязанная справка по алгоритмам?
41. Какие виды сигнализации вы знаете?
42. Поясните назначение модификатора в различных алгоритмах: ИЛИ, ОКО, ДИК.
43. Что предусмотрено в кросс-средстве Редитор Р-130 при программировании, когда вы подошли к границе экрана?
44. Когда и как сигнализируется об отказе самого контроллера Р-130 или ошибках в программе пользователя? Приведите примеры. Как расшифровываются коды ошибок?
45. Как сигнализируется в контроллере Р-130 о том, что время выполнения программы превышает установленное время цикла контроллера? Можно ли оценить время выполнения программы?
Выводы
В данном пособии показано, что разработать многоканальную качественную систему технологической сигнализации не так-то просто. Для повышения надёжности срабатывания сигнализации требуется проверка на достоверность входной информации. Предложены варианты программ, выявляющих и исключающих систематическую погрешность, сбои и отказы в измерительном канале. Для ответственных параметров следует иметь резервные каналы с автоматическим переключением на исправный канал, как аппаратно, так и программно. Для основных аналоговых сигналов технологического процесса целесообразен прогноз изменения аналогового сигнала. При прогнозе рекомендуются по каждому параметру в паспорте (имеется в виду SCADa-система) задавать ещё два параметра: время реакции оператора и время реакции системы. Обращается внимание на необходимость правильной оценки гистерезиса в пороговом алгоритме по каждому аналоговому каналу.
Предлагается методика проектирования системы сигнализации, раскрывается важность использования того или иного алгоритма из библиотеки алгоритмов контроллера.
Показано, что в современных контроллерах не всегда имеется достаточный набор алгоритмов, необходимых для реализации надёжной сигнализации (с точки зрения реализуемых функций).
Литература, предложенная читателю, поможет глубже познакомиться с затронутыми вопросами.
Приложение А. Программа генератора сигналов треугольной формы
На рисунке 102 представлена программа (GEN-RUCH.REM) генератора сигналов треугольной формы.


Рисунок 102.– Генератор сигналов треугольной формы
Программа (GEN.REM), приведённая на рисунке 102, проверена и исправлена. Введены блоки обратного счёта. На входе сброса триггера поставлена инверсия. Блоки обратного счёта (БОС) блокируют процедуру обратного счёта [47], которая здесь вредна. При реализации стандартных законов регулирования процедура обратного счёта позволяет проще реализовать безударный переход с ручного режима на автоматический [45, 49].
Отображение информации на ЛП (контур 1)
| Номер входа
| Цифровой индикатор
| Шифр входа
| Шкала
| Наименование
|
|
| ЦИ
| Z1
| 0-100
| Значение сигнала, поступающего по первому каналу с имитатора
|
|
| ЦИ
| Z2
| 0-100
| Выход интегратора (выход алгоблока 8)
|
|
| ЦИ
| Z3
| 0-100
| Сигнал с переключателя: или с интегратора или с имитатора
|
|
| ЦИ
| Z4
| 0-100
| Просмотр сигнала первого канала, включая имитацию обрыва в измерительной линии
|
|
| Светодиод (второй[35] прямоугольник сверху на ЛП)
| Z4
| 0-100
| Сигнал достижения сигналом на выходе интегратора порогового значения Хпор. Хпор=100.
|
В таблице 17 приведена расшифровка алгоритмов, использованных в программе GEN-RUCH.REM (рис.77).
Таблица 17
| Номер алгоблока
| Шифр алгоритма
| Комментарии
|
|
| ОКЛ
| Алгоритм оперативного контроля значений аналоговых сигналов на ЛП
|
|
| ВАА
| Ввод аналогового сигнала с имитатора
|
|
| ВДБ
| Ввод дискретных сигналов с имитатора
|
|
| ТРИ
| Триггер, управляет переключателем
|
|
| ИНТ
| Интегратор
|
|
| ПОР
| Пороговый элемент
|
|
| ПЕР
| Переключатель, с которого поступает на вход интегратора то положительное, то отрицательное значение
|
|
| ПЕР
| Переключатель сигнала с генератора или с имитатора
|
|
| ПЕР
| Переключатель. Имитация обрыва по первому каналу
|
|
| ПЕР
| Переключатель. Имитация обрыва по второму каналу
|
|
| ПЕР
| Переключатель. Имитация обрыва по третьему каналу
|
|
| ОДВ
| Одновибратор. Пока не используется.
|
|
| БОС
| Блокировка процедуры обратного счёта при имитации обрыва по первому каналу
|
|
| БОС
| Блокировка процедуры обратного счёта при имитации обрыва по второму каналу
|
|
| БОС
| Блокировка процедуры обратного счёта при имитации обрыва по третьему каналу
|
Следует напомнить, что процедура получения чертежа программы (например, которая представлена на рисунке 102) подробно изложена в пособии [47, с.100]. Поясним, файл чертежа (имеет расширение dwg) невозможно загрузить в контроллер, а файл программы (GEN-RUCH.REM), в данном случае на языке функциональных алгоблоков, можно! Все пояснения, изменение положения линий и блоков выполняются в AutoCAD (2000 или 2004). Вообще для всех наших работ достаточно версии AutoCAD под DOS[36]. Для преобразования программы, созданной в графическом пакете Редитор Р-130, в формат AutoCAD, в Редиторе Р-130 имеется утилита (программа) Re2acad.exe, которая переводит программу с расширением *.rem в dxf – формат с тем же именем (*.dxf). Это преобразование выполняем в среде Totalcmd. Например, получили в Редиторе программу с именем GEN-RUCH.REM. После перекодировки будем иметь файл GEN-RUCH.dxf. А dxf-формат воспринимается графическим пакетом AutoCAD. После проведения марафета (выравнивание линий, удаления зигзагов, добавления пояснений, выравнивания алгоблоков и т.д.) сохраняем полученный файл (программу) в формате dwg. Оформленный для отчёта чертёж GEN-RUCH.dwg копируем и вставляем документ с расширением doc, т.е. в наш документ. Лучше вставлять чертёж не сразу в пояснительную записку (документ в формате WORD), а вначале вставить его в пакет Paint. В этом случае чертёж становится более чётким. В пакете Paint наводим окончательный марафет и копируем и вставляем в текстовый документ, полученный в WORDе. Иногда ещё используется графический редактор FSViewerPortable.exe. Таким образом, чтобы в семестровой работе рисунок программы был чётким и понятным придётся потрудиться.
Список литературы
1. IEC 61131-3 Part 3. Programming Languages.
2. Анисимов Б.В. Аналоговые вычислительные машины / Б.В. Анисимов, В.Н. Голубкин. – М.: Высшая школа, 1971. – 448 с.
3. Бергер Ганс. Автоматизация с помощью программ / STEP7 LAD и FBD. Программируемые контроллеры SIMATIC S7-300/400 / Ганс Бергер. – 2-е изд., перераб. – М.: Акционерное общество «Siemens», 2001. – 605 с.
4. Браганец С.А., Савчиц А.В., Севастьянов Б.Г. Повышение надежности измерительной информации// Промышленные АСУ и контроллеры. – 2011. № 2. – с.46-49.
5. Бурцев А.Г. Возможности отладки программы в среде PC WORX 6. Создание функциональных блоков. Сборник «Методические указания». Выпуск 1. [Электронный ресурс]. – Волгоград: ВолгГТУ, 2014. – номер гос. регистрации 0321400872- 1 CD-ROM.
6. Бурцев А.Г. Учебный стенд ILC 130 STARTERKIT на базе контроллера ILC130 ETH(Phoenix Contact)Сборник «Методические указания». Выпуск 1. [Электронный ресурс] / А.Г. Бурцев, Б.Г. Севастьянов. - Волгоград: ВолгГТУ, 2014. - номер гос. регистрации 0321400872- 1 CD-ROM.
7. Вострокнутов Н.Г., Евтихиев Н.Н. Информационно-измерительная техника. – М.: Высшая школа, 1977. – 232 с.
8. Глушков В.М. Введение в АСУ/В.М.Глушков.–Киев: Технiка, 1972.– 320 с.
9. Горячев В.П. Основы автоматизации производства в нефтеперерабатывающей промышленности. – М.: Химия, 1987. – 128 с.
10. Догановский С. А. Устройства запаздывания и их применение в автоматических системах / С.А. Догановский, В.А. Иванов. – М.: Машиностроение, 1966. – 310 с.
11. Ерусалимский Я.М. Дискретная математика: теория, задачи, приложения / Я.М. Ерусалимский. – 3-е издание. – М.: Вузовская книга, 2000. – 280 с.
12. Ицкович Э.Л., Трахтенгерц Э.А. Алгоритмы централизованного контроля и управления производством. – М.: Советское радио, 1967. – 352 с.
13. Конфигурирование области ввода/вывода ПЛК1хх.-Руководство пользователя [Электронный ресурс].
14. Корн Г. А. Электронные аналоговые и аналого-цифровые вычислительные машины / Г. А. Корн, Т. М. Корн. – пер. с англ. М.: Мир, 1967. – 462 с.
15. Кузнецов О.П. Дискретная математика для инженера / О.П. Кузнецов, Г.М. Адельсон-Вельский. – М.: Энергоатомиздат, 1988. – 480 с.
16. Клюев А.С., Глазов Б.В., Миндин М.Б. Техника чтения схем автоматического управления и технологического контроля. Под ред. А.С. Клюева.- М.: Энергия, 1977.-296с.
17. Левин Л., Методы решения технических задач с использованием аналоговых вычислительных машин / Л. Левин. – пер. с англ. – М.: Мир, 1966. – 415 с.
18. МИ 2440-97 «Методы экспериментального определения и контроля характеристик погрешности измерительных каналов измерительных систем и измерительных комплексов».
19. Микропроцессорный контроллер Ремиконт Р– 130. – М.: НИИтеплоприбор, 1990. – 330с.
20. Наладка автоматических систем управления технологическими процессами: Справочное пособие / под ред. А.С. Клюева. – М.: Энергия, 1997. – с. 69–70.
21. Нестеров А.Л. Проектирование АСУ ТП. Книга 2.-СПб.: Издательство ДЕАН, 2009.-с.164-173. ISBN 978-5-93630-654-9.
22. Номенклатурный каталог 2003.–Воронеж: ОАО«Автоматика»,2003.–с. 106-126, 507-509.
23. Обновленский П. А. Системы защиты потенциально опасных процессов химической технологии [Текст] / П. А. Обновленский, Л. А. Мусяков, А. В. Чельцов. – Ленинград: Химия, 1978. – 223 с.
24. Осипов Г.С. Системы искусственного интеллекта [Электронный ресурс]// Компьютера 2002. № 30. – Режим доступа: http:// http://old.computerra.ru/print/19246/ – (Дата обращения: 05.02.2014).
25. Официальный сайт «ОВЕН» оборудование для автоматизации [Электронный ресурс]. – Режим доступа: http://www.owen.ru. – Контрольно-измерительные приборы ОВЕН: датчики, контроллеры, регуляторы, измерители, блоки питания и терморегуляторы. – (Дата обращения: 20.10.2014).
26. Парр Э. Программируемые контроллеры. Руководство для инженера/ Э.Парр. – М.: Бином. Лаборатория знаний, 2007. – 516c.
27. Первые шаги программирования ОВЕН ПЛК [Электронный ресурс] – Режим доступа: http:// http://www.kipshop.ru/CoDeSys/steps/ first_steps_with_codesys_ru.pdf
28. Петров И.В. Отладка прикладных ПЛК программ в CoDeSys (часть 1-11) / И.В. Петров, В. Долл // Промышленные АСУ и контроллеры. – 2006, № 2-5,7,9,11, 2007г № 1,3.
29. Петров И.В. Программируемые контроллеры. Стандартные языки и приемы прикладного проектирования /И.В. Петров, под ред. проф. В.П. Дьяконова. – М.: СОЛОН-Пресс, 2004. – 256 с.
30. Петровский В.П. Парадигма цифровой электроники XXIв. в измерительных системах и промышленных контроллерах/ В.П. Петровский // Промышленные АСУ и контроллеры. 1999. – № 10. с. 1–7.
31. Пономарев В.Ф. Основы дискретной математики. Учебное пособие/ В.Ф. Пономарев. – Калининград: КГТУ, 1997. – 162 с.
32. Порядок программирования контроллеров семейства ПЛК1хх (ПЛК100, ПЛК150, ПЛК154, ПЛК110) Руководство пользователя.
33. Правила устройства электроустановок 7-е изд. – М.: Энергия, 2007. – 704с.
34. Программа – конфигуратор панели оператора СП200 [электронный ресурс] Режим доступа: http://www.owen.ru/uploads/rp_sp270_v09.pdf.
35. Программируемый логический контроллер ОВЕН ПЛК 150 – Технические характеристики [Электронный ресурс] режим доступа: http://www.owen.ru/catalog/programmiruemij_logicheskij_kontroller_oven_plk_150/39674697
36. Разарёнов Ф. ОВЕН ПЛК – аналог продукции мировых лидеров за умеренную цену / Ф Разарёнов// Автоматизация и производство. 2006. – №2. – с.8-12.
37. РД 34.35.101-88: Методические указания по объему технологических измерений, сигнализации и автоматического регулирования на тепловых электростанциях.
38. Руководство пользователя по программированию ПЛК в CoDeSys 2.3[Электронный ресурс] режим доступа: http://www.kipshop.ru/CoDeSys/steps/codesys_v23_ru.pdf
39. Савчиц А.В., Севастьянов Б.Г. Методические указания для выполнения лабораторной работы № 1 "Информационный обмен в промышленных контроллерах". – Волгоград: ВолгГТУ, 2011.– 63 с.
40. Севастьянов Б. Г. Реализация циклограмм на контроллерах / Б. Г. Севастьянов // Промышленные АСУ и контроллеры. 2012.– № 7. – с. 54-61.
41. Севастьянов Б. Г. Повышение качества библиотек промышленных контроллеров // Промышленные АСУ и контроллеры. 2014.–№ 1.–с. 37–46.
42. Севастьянов Б. Г. Программная реализация блока сигнализации на микропроцессорной технике// Нефтепереработка и нефтехимия. 2007. – №10. – с. 43 – 45.
43. Севастьянов Б. Г. Программная реализация технологической сигнализации на промышленных контроллерах// Промышленные АСУ и контроллеры. 2012. – № 8. – с. 50 – 57.
44. Севастьянов Б. Г. Разработка дискретных систем контроля и управления Учебное пособие.– Волжский: ВФ МЭИ, 2010. – 162 с.
45. Севастьянов Б.Г. Алгоритмы, повышающие надёжность АСУ ТП // Вторая Всероссийская научно-практическая конференция «Ресурсо-энергосбережение и эколого-энергетическая безопасность промышленных городов».– г. Волжский, 23–26 сентября 2008. – с. 117 – 122.
46. Севастьянов Б.Г. Безударность и надёжность систем автоматического регулирования // Приборы и системы управления. – 2007. – №12. – с.1–4.
47. Севастьянов Б.Г. Микропроцессорное управление задвижками, распределяющими потоки жидкости и газа// Приборы и системы управления.-2008 №10-с.1-5.
48. Севастьянов Б.Г. Выбор исправного измерительного канала с использованием микропроцессорной техники//XIV Межвузовская научно-практическая конференция молодых ученых и студентов г. Волжского(24-26 мая 2010г.) Секция №2: «Информационно-измерительные и управляющие системы».
49. Севастьянов Б.Г. Проектирование микропроцессорных систем управления: учебное пособие/ Б.Г. Севастьянов; ВПИ (филиал) ВолгГТУ [Электронный ресурс]. - Волгоград: 2009. - 220 с.-ч. 2. ISBN 078-5-9948-0240-3.
50. Севастьянов Б.Г. Реализация дискретных систем управления на контроллерах Учебное пособие. Гриф УМО. – Волгоград: ВолгГТУ, 2011. – 244 с.
51. Севастьянов Б.Г. Реализация законов аналогового регулирования на контроллерах. – Волгоград: ВолгГТУ, 2013. – 172 с.
52. Севастьянов Б.Г., Савчиц А.В. Формирование заданий для выполнения КР и КП на промышленных контроллерах. - Волжский, 2014.-77с.
53. Севастьянов Б.Г., Бурцев А.Г., Силаев А.А. Реализация технологической сигнализации на контроллерах: учеб. Пособие/ Б.Г. Севастьянов, А.Г. Бурцев, А.А.Силаев; ВПИ (филиал)ВолГТУ.-Волгоград: ИУНЛ ВолГТУ, 2015.-121с. ISBN 978-5-9948-1692-9.
54. Севастьянов Б.Г., Мокичева Ю.В. Задания для семестровых работ: Учебно-методическое пособие / Б.Г. Севастьянов, Ю.В. Мокичева.- Волжский: Филиал ФГБОУ ВО «НИУ «МЭИ» в г. Волжском, 2015.-80с.
55. Севастьянов Б.Г., Севастьянов Д.Б. Принципы программирования в АСУ ТП на языке FBD// Промышленные АСУ и контроллеры. 2015.–№ 12.–с...
56. Современные устройства аварийно-предупредительной сигнализации // ИНИИТЭИ приборостроения, Москва.-1982.
57. Урмаев А. С. Основы моделирования на АВМ. – М.: Наука, 1978. – 272 с.
Дополнительная литература
58. Альтерман И.З., Шалыто А.А. Формальные методы программирования логических контроллеров//Промышленные контроллеры и контроллеры. 2005, №10.
59. Альтшулер С.В[37]. Методы помехоустойчивого контроля в автоматизированных системах управления объектами химико-технологического типа// Химическая технология.-1985, №6.-с.54-56.
60. Альтшулер С.В. Программные методы контроля в АСУ ТП нефтепереработки и нефтехимии. Обзорная информация. Серия: Автоматизация и контрольно-измерительные приборы в нефтеперерабатывающей и нефтехимической промышленности.-М.: ЦНИИТЭнефтехим, 1990.-40с. ISSN 0206-362x.
61. Балакай В.Г Интегральные схемы аналого-цифровых преобразователей /Балакай В.Г, Крюк И.П., Лукьянов Л.М.; Под ред. Лукьянова Л.М..-М: Энергия, 2008.-257с.: Ил.-Библиогрс.251-256.
62. Гельман М.М. Аналого-цифровые преобразователи для информационно-измерительных систем /Гельман М.М..-М.: Изд-во стандартов, 2009.-317с.
63. ГОСТ 12.2.003-74 Оборудование производственное. Общие требования безопасности.
64. ГОСТ 19.001-77. Общие положения.
65. ГОСТ 19.003-80. Схемы алгоритмов и программ. Обозначение условные графические.
66. ГОСТ 19.004-80. Термины и определения (Заменен на ГОСТ 19781-90).
67. ГОСТ 19.005-85. Р-схемы алгоритмов и программ. Обозначения условные графические и правила их выполнения.
68. ГОСТ 19.101-77. Виды программ и программных документов (спецификация; ведомость держателей подлинников; текст программы; описание программы; программа и методика испытаний; ТЗ; пояснительная записка: схема алгоритма, его описание, обоснование выбранного метода расчёта; эксплуатационные документы: формуляр, руководство системного программиста, руководство программиста, руководство оператора, описание языка).
69. ГОСТ 19.102-77. Стадии разработки.
70. ГОСТ 19.104-78. Основные надписи.
71. ГОСТ 19.105-78. Общие требования к оформлению программной документации (с учётом ПЭВМ).
72. ГОСТ 19.202-78. Спецификация. Требования к содержанию и оформлению.
73. ГОСТ 19.301-79. Программа и методика испытаний. Требования к содержанию и оформлению.
74. ГОСТ 19.401-78. Текст программы.
75. ГОСТ 19.402-78. Описание программы.
76. ГОСТ 19.502-78. Описание применения.
77. ГОСТ 19.503-79. Руководство системного программиста.
78. ГОСТ 19.504-79. Руководство программиста.
79. ГОСТ 19.505-79. Руководство оператора.
80. ГОСТ 19.506-79. Описание языка.
81. ГОСТ 19.508-79. Руководство по техническому обслуживанию.
82. ГОСТ 19.701-90. Схемы алгоритмов, программ, данных и систем.
83. ГОСТ 2.301-2.316
84. ГОСТ 2.709-89. Обозначения проводов и контактных соединений, электрических элементов, оборудования и участков цепей в электрических схемах.
85. ГОСТ 2.743-82. Обозначения условные графические в схемах.
86. ГОСТ 21.404-85. Условные обозначения приборов и средств автоматизации.
87. ГОСТ 21.552-84 Средства вычислительной техники. Защита вычислительной техники от внешних воздействий.
88. ГОСТ 24.204-80. Требования к содержанию документа «описание постановки задачи».
89. ГОСТ 24.206-80. Требования к содержанию документов по техническому обеспечению.
90. ГОСТ 24.207-80. Требования к содержанию документов по программному обеспечению.
91. ГОСТ 24.211-82. Требования к содержанию документа «Описание алгоритма».
92. ГОСТ 24104-85 (Указывается гарантийный срок для АСУТП –18 месяцев).
93. ГОСТ 25861-83 Безопасность вычислительной техники
94. ГОСТ 26.011—80. Средства измерений и автоматизации. Сигналы тока и напряжения электрические непрерывные входные и выходные.
95. ГОСТ 27.002—89. Надежность в технике. Основные понятия. Термины и определения.
96. ГОСТ 27883—88 Средства измерения и управления технологическими процессами. Надежность. Общие требования и методы испытаний.
97. ГОСТ 28.806-90. Качество программных средств. Термины и определения.
98. ГОСТ 28147-89 Алгоритмы блочного шифрования и др. Криптозащита.
99. ГОСТ 34.201-89. Обозначение документов.
100. ГОСТ 34.601-90. Автоматизированные системы. Стадии создания.
101. ГОСТ 34.602-89. Техническое задание.
102. ГОСТ 603-92. Виды испытаний автоматизированных систем.
103. ГОСТ В 29.00.002-84 ССЭТО. Эргономическое обеспечение. Основные положения.
104. ГОСТ Р 50923-96 Рабочее место оператора. Общие эргономические требования и требования к производственной среде. Методы измерения. (Утвержден и введен в действие на территории РФ с 1-го июля 1997 г. Постановлением Госстандарта России от 10 июля 1996 г. № 451).
105. ГОСТ Р 50948-2001. Средства отображения информации индивидуального пользования. Общие эргономические требования и требования безопасности.
106. ГОСТ Р 50948-96. Средства отображения информации индивидуального пользования. Общие эргономические требования и требования безопасности. (Утвержден и введен в действие на территории РФ с 1-го июля 1997 г. Постановлением Госстандарта России от 11 сентября 1996 г. № 576).
107. ГОСТ Р 51840-2001(IEC 61131-1-92) Программируемые контроллеры. Общие положения и функциональные характеристики. - М.: Госстандарт России.-2003.
108. ГОСТ Р В 29.08.001-96 ССЭТО[38]. Эргономическая экспертиза. Основные положения, программы и методики.
109. ГОСТ24.701-86 Надежность АСУ. Основные положения
110. Дж.Кемени, Дж. Снелл, Дж. Томпсон Введение в конечную математику.-пер. с англ. М.: Мир.-1965.
111. Карпов Ю.Г. Теория алгоритмов. СПб: Питер, 2002.
112. Липатов И.Н. Конспект лекций по курсу: Надёжность функционирования автоматизированных систем.- Пермь: 1996.-66c.
113. Севастьянов Б.Г. Оценка показателей надёжности в АСУ ТП: методические указания.- ВПИ (филиал) ВолгГТУ, Волгоград, 2014.- 139с.
114. Севастьянов, Б.Г. Принципы программирования контроллеров на языке функциональных блоковых диаграмм / Б.Г. Севастьянов, И.А. Жолобов, Д.Б. Севастьянов // «Инженерный вестник Дона» – 2014. – №.2 – Режим доступа: http://www.ivdon.ru/magazine/archive/n2y2014/2344 (доступ свободный).
115. Севастьянов, Б.Г., Севастьянов Д.Б. Совершенствование функций кросс-средств, применяемых в АСУ ТП. Десятая межрегиональная научно- практическая конференция «Взаимодействие предприятий и вузов — наука, кадры, новые технологии», г.Волжский, 29 апреля 2014г. / Сборник докладов конференции. – ВПИ (филиал) ВолгГТУ, 2014. – с.35-41.
116. Тэллес М., Хсих Ю. Наука отладки/Пер. с англ. М.: КУДИЦ-ОБРАЗ, 2003.
117. Цифровые и аналоговые системы передачи: Учебник для вузов /Иванов В.И., Гордиенко В.Н., Попов Г.Н. и др.; Под ред. Иванова В.И..-М.: Радио и связь, 2007.-232с.: ил..-Библиогр.:с.229-230.-ISBN 5-256-01226-6.
118. Шалыто А.А. Логическое управление. Методы аппаратной и программной реализации алгоритмов. СПб: Наука, 2000.
119. Элементы цифровой техники.
120. http://www.adastra.ru/
121. Комплексы программно-технические Квинт СИ.- Технические условия.-ТУ 4218-001-78466722-2005.
122. Комплекс программно-технический КВИНТ СИ. - Проектирование и эксплуатация. - Многоканальный многоцелевой контроллер Ремиконт Р-380, Руководство по применению и эксплуатации.- УЮИЛ.421457.001 РЭ.-2017. Аналогичная документация разработана и на многоцелевой контроллер Ремиконт Р-390.
Примечание. В институте сложно отслеживать изменения ГОСТов, поэтому некоторые ГОСТы, вполне возможно, заменены новыми, но суть от этого не должна меняться.
Приложение Б
У Нестерова А.Л. [20] приводятся релейно-контактные схемы сигнализации. К сожалению, отсутствует расшифровка некоторых обозначений и не описывается принцип работы в различных режимах. Я вначале внёс их в приложение, но потом решил убрать, т.к. описание и трактовка может расходиться с автором этих схем. Студентам желательно ознакомиться, например, взяв эти схемы и сравнив функции и программную реализацию сигнализации на релейно-контактных элементах и программно на контроллере в рамках семестровой работы.








