

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Топ:
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Выпускная квалификационная работа: Основная часть ВКР, как правило, состоит из двух-трех глав, каждая из которых, в свою очередь...
Интересное:
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Рассмотрим реализацию простого трёхканального блока сигнализации, приведенной на рисунке 48.
Сигнализация предусмотрена по первым трём дискретным каналам. Входные дискретные каналы обозначают DI. По первому каналу имеется защита от «дребезга» и от исчезновения сигнала. По остальным двум – только защита от «дребезга». Четвёртый канал является резервным. Далее рассматривается программа с таким же названием, но в ней задействованы не только дискретные сигналы, но и аналоговые. Алгоритмы, используемые в программах, описаны в пособии [47] и в кросс-средстве Редитор Р-130. В таблице 8 даётся расшифровка сокращений алгоритмов и их назначение, используемых в программе трехканального блока сигнализации.
Таблица 10 Расшифровка сокращений алгоритмов и их назначение
| Номер алгоблока | Шифр алгоритма | Комментарии |
| ОКЛ | Алгоритм оперативного контроля. На 9-ом выходе формируется дискретный сигнал для сброса звуковой сигнализации. Сигнал появляется при нажатии на ЛП клавиши крючок. | |
| ОКЛ | Алгоритм оперативного контроля. На 9-ом выходе формируется дискретный сигнал для просмотра архива нарушений. Сигнал для просмотра памяти формируется нажатием на ЛП клавиши крючок. | |
| ВДБ | Ввод дискретных сигналов группы Б. | |
| ИЛИ | Промежуточный клеммник | |
| МИЛ | Многовходовое ИЛИ. Сборка нарушений | |
| МИЛ | Многовходовое ИЛИ. Сборка нарушений до ОДВ | |
| 09, 19, 11 | ТМР | Таймер реализует защиту от «дребезга» |
| ТМР | Таймер для сброса триггера после исчезновения нарушения по первому каналу | |
| ТРИ | Триггер для запоминания нарушения по первому каналу | |
| 14, 15, 16 | ОДВ | Одновибратор формирует единичный импульс при нарушении |
| ТРИ | Триггер для запоминания нарушения, появившегося на любом канале | |
| МУВ | Мультивибратор. | |
| ТМР | Таймер. Задержка сброса памяти нарушений (архива). | |
| ЛОИ | Двухвходовая логика И. Канал световой сигнализации | |
| ИЛИ | Двухвходовая логика ИЛИ. Канал световой сигнализации | |
| ИЛИ | Двухвходовая логика ИЛИ. На первом ИЛИ формируется звук, по второму каналу (второй ИЛИ) — свет | |
| ЛОИ | Двухвходовая логика И. Алгоритм И предназначен для разрешения просмотра архива нарушений по условию | |
| ДИК | Алгоритм дискретного контроля. Отображение на светодиодаз звуковой и световой сигнализации и просмотр архива нарушений | |
| ДВБ | Выдача дискретных сигналов через УСО для включения звукой и световой сигнализации при нарушениях |
|
|
Информация, выдаваемая на светодиоды лицевой панели логической модели контроллера Р-130 через алгоритм ДИК, представлена в таблице 11.
Таблица 11 Информация лицевой панели логической модели контроллера Р-130
| Номер входа алгоритма ДИК | Шифр входа | Наименование сигнала |
| D1 | Звуковая сигнализация | |
| D2 | Световая сигнализация | |
| · · · | · · · | · · · |
| D25 | Просмотр памяти: Нарушение по первому каналу | |
| D26 | Просмотр памяти: Нарушение по второму каналу | |
| D27 | Просмотр памяти: Нарушение по третьему каналу |
Следует напомнить, что просмотр памяти (архива нарушений) производится по условию. Для этого устанавливают на ЛП логической модели контроллера контур номер два и нажимают клавишу крючок  . В результате на 9-м выходе алгоритма ОКЛ (алгоблок номер два) формируется логическая единица, которая поступает на второй вход каждого алгоритма И. Таким образом, мы подаём разрешающую единицу на каждый И. А на первые входы элементов И (алгоблок 24) поступают сигналы с триггеров, фиксирующих нарушение по каналам. В алгоблоке 17 находится группа триггеров. Так первый триггер запоминает нарушение по первому каналу, если оно было, и т.д. Обратите внимание, логическая единица с 9-го выхода ОКЛ поступает инверсно на второй вход таймера (вход сброса таймера). Таймер (в алгоблоке 20) начинает работать и через пять секунд на выходе нуль-органа таймера появляется логическая единица, которая сбрасывает все триггера архива. Если отпустить клавишу раньше, то сброса архива не произойдёт. Мы будем наблюдать на ЛП, на светодиодах нижнего ряда только архив нарушений. Контроль времени, отсчитываемый таймером, можно осуществлять, если подать временной сигнал с таймера (первый выход алгоблока 20 на вход Z1, вход 5 ОКЛ, расположенного во втором алгоблоке). Т.к. работаем со вторым контуром. Чтобы наблюдать время в секундах признак Nz1 должен быть равен единице [47].
. В результате на 9-м выходе алгоритма ОКЛ (алгоблок номер два) формируется логическая единица, которая поступает на второй вход каждого алгоритма И. Таким образом, мы подаём разрешающую единицу на каждый И. А на первые входы элементов И (алгоблок 24) поступают сигналы с триггеров, фиксирующих нарушение по каналам. В алгоблоке 17 находится группа триггеров. Так первый триггер запоминает нарушение по первому каналу, если оно было, и т.д. Обратите внимание, логическая единица с 9-го выхода ОКЛ поступает инверсно на второй вход таймера (вход сброса таймера). Таймер (в алгоблоке 20) начинает работать и через пять секунд на выходе нуль-органа таймера появляется логическая единица, которая сбрасывает все триггера архива. Если отпустить клавишу раньше, то сброса архива не произойдёт. Мы будем наблюдать на ЛП, на светодиодах нижнего ряда только архив нарушений. Контроль времени, отсчитываемый таймером, можно осуществлять, если подать временной сигнал с таймера (первый выход алгоблока 20 на вход Z1, вход 5 ОКЛ, расположенного во втором алгоблоке). Т.к. работаем со вторым контуром. Чтобы наблюдать время в секундах признак Nz1 должен быть равен единице [47].
|
|
1) Обратили внимание. Следует пояснить, как выдаётся на индикацию память нарушений (предыстория). В данном случае по условию: по нажатию клавиши (крючок) с ЛП во первом контуре. Если длительность нажатия будет больше пяти секунд, то память сбросится. Здесь используется приём, когда с помощью одной клавиши можно просмотреть нарушения и их сбросить.
Нажатием одной клавиши мы и просматриваем архив нарушений и можем сбросить триггера архива нарушений. Т.е. обнулить архив. Если вас спросит Пикэмон[28], что вы не сможете с лицевой панели логической модели Р-130 ввести число. Он глубоко ошибается. Приходится находить нестандартные решения, чтобы разочаровать Пикэмона. Студенты увлекаются борьбой интеллекта и стараются не только формально учиться, а учиться с интересом, находить решения казалось бы в безвыходных ситуациях. Прослушав лекции БГ, они не боятся трудностей, а настойчиво и уверенно их преодолевают. Через некоторое время они не только одной клавишей вводят два дискретных сигнала, с помощью одной клавиши могут вводить любое число, но и решают более сложные задачи.
При проведении занятий используются различные приёмы и формы: занятие-визуализация, занятие с запланированными ошибками, проблемное занятие, занятие с применением групповой формы организации учебной деятельности, имитация и анализ конкретных ситуаций, соревнование подгрупп на достижение поставленной цели, моделируются ситуации работы во враждебной среде (в среде вероятных врагов и предателей).

Рисунок 48 Программа трёхканального блока сигнализации
Конфигурационная таблица по сигнализации приведена в таблице 12.
|
|
Имя схемы: sig-3DI.rem
Дата создания отчета: 25/04 /2013 (СДБ)
С И С Т Е М Н Ы Е П А Р А М Е Т Р Ы:
Системный номер контроллера: 3
Модель контроллера: Логическая
Комплектность УСО группы А: 8 ан.вх. и 2 ан.вых.(1)
Комплектность УСО группы Б: 8 д.вх. и 8 д.вых.(5)
Временной диапазон контроллера: Младший(Сек/Мин)
Время цикла: 0.4 сек.
Минимальное время цикла: 0.2 сек
Таблица 12 Конфигурационная таблица по сигнализации
| Ал.б. | Алгоритм | Мод | Вход | Значение | Источник |
| ВДБ(10) | Ввод дискретных сигналов | ||||
| ИЛИ(72) | Промежуточный клеммник | ||||
| 1 C11 | 5/1(D1) | ||||
| 2 С21 | |||||
| 3 C12 | 5/2(D2) | ||||
| 4 С22 | |||||
| 5 C13 | 5/3(D3) | ||||
| 6 С23 | |||||
| МИЛ(73) | |||||
| 1 C1 | 14/1(D) | ||||
| 2 C2 | 15/1(D) | ||||
| 3 C3 | 16/1(D) | ||||
| 4 резерв | |||||
| МИЛ(73) | |||||
| 1 C1 | 13/1(D1) | ||||
| 2 C2 | 10/2(D1) | ||||
| 3 C3 | 11/2(D1) | ||||
| 4 C4 | |||||
| ТМР(81) | |||||
| 1 Сст | |||||
| 2 Ссбр | инверсия | 6/2(D2) | |||
| 3 T1=3 | |||||
| ТМР(81) | |||||
| 1 Сст | |||||
| 2 Ссбр | инверсия | 6/3(D3) | |||
| 3 T1=3 | |||||
| Алгоблоки 9, 12 и 13 составляют защиту по первому каналу | |||||
| ТМР(81) | |||||
| 1 Сст | |||||
| 2 Ссбр | инверсия | 6/1(D1) | |||
| 3 T1=3 | |||||
| ТМР(81) | |||||
| 1 Сст | |||||
| 2 Ссбр | 6/1(D1) | ||||
| 3 T1 | |||||
| ТРИ(76) | |||||
| 1 Cs1 | 9/2(D1) | ||||
| 2 Cr1 | 12/2(D1) | ||||
| ОДВ(83) | - | ||||
| 1 30/1 | 13/1(D1) | ||||
| 2 Ссбр | |||||
| 3 T=1 | |||||
| ОДВ(83) | - | ||||
| 1 10/2 | 10/2(D1) | ||||
| 2 Ссбр | |||||
| 3 T | |||||
| ОДВ(83) | - | ||||
| 1 11/2 | 11/2(D1) | ||||
| 2 Ссбр | |||||
| 3 T | |||||
| ТРИ(76) | |||||
| 1 Cs1 | 14/1(D) | ||||
| 2 Cr1 | 20/2(D1) | ||||
| 3 Cs2 | 15/1(D) | ||||
| 4 Cr2 | 20/2(D1) | ||||
| 5 Cs3 | 16/1(D) | ||||
| 6 Cr3 | 20/2(D1) | ||||
| 9 Cs5 | 7/1(D) | ||||
| 10 Cr5 | 18/1(D) | ||||
| МИЛ(73) | |||||
| 1 C1 | 1/9(Dкл) | ||||
| 2 8/1 | инверсия | 8/1(D) | |||
| 3 C3 | |||||
| МУВ(84) | - | ||||
| 1 Сп | |||||
| 2 Ссбр | |||||
| 3 T1 | 0.5 | ||||
| 4 T0 | 0.5 | ||||
| ТМР(81) | |||||
| 1 Сст | |||||
| 2 Ссбр | инверсия | 1/9(Dкл) | |||
| 3 T1=5 | |||||
| ЛОИ(70) | |||||
| 1 C11 | 17/5(D5) | ||||
| 2 C21 | 19/1(D) | ||||
| 3 C12 | инверсия | 17/5(D5) | |||
| 4 C22 | 8/1(D) | ||||
| ИЛИ(72) | |||||
| 1 C11 | 21/1(D1) | ||||
| 2 С21 | 21/2(D2) | ||||
| ИЛИ(72) | |||||
| 1 C11 | 17/5(D5) | ||||
| 2 С21 | 2/9(Dкл) | ||||
| 3 C12 | 22/1(D1) | ||||
| 4 С22 | 2/9(Dкл) | ||||
| ЛОИ(70) | |||||
| 1 C11 | 17/1(D1) | ||||
| 2 C21 | 1/9(Dкл) | ||||
| 3 C12 | 17/2(D2) | ||||
| 4 C22 | 1/9(Dкл) | ||||
| 5 C13 | 17/3(D3) | ||||
| 6 C23 | 1/9(Dкл) | ||||
| ДИК(04) | |||||
| 1 С1 | Звук | 23/1(D1) | |||
| 2 С2 | Свет | 23/2(D2) | |||
| … | … | … | … | … | … |
| … | … | … | … | … | … |
| Причина сигнализации: первый канал | 25 С25 | 24/1(D1) | |||
| Причина сигнализации: второй канал | 26 С26 | 24/2(D2) | |||
| Причина сигнализации: третий канал | 27 С27 | 24/3(D3) | |||
| ДВБ(14) | |||||
| 1 C1 | Звук | 23/1(D1) | |||
| 2 C2 | Свет | 23/2(D2) |
|
|
Рекомендации по связи программы со SCADa-системой
Создание нового проекта и настройка узла RTM было описано в методическом пособии [38]. Рассмотрим организацию связи с верхним уровнем на простой программе, осуществляющей ввод и вывод аналоговых и дискретных сигналов на регулирующей модели контроллера с логическим адресом 02 и средством Trace Mode[29]. Одна из таких программ представлена на рис. 49.
C описание TRACE MODE можно познакомиться на сайте разработчика http://www.adastra.ru/[118].
Краткая методика работы с системой TRACE MODE 5 даётся в учебном пособии [43].

Рисунок 49 Программа ввода - вывода аналоговых и дискретных сигналов.
Программа на рисунке 49 включает в себя следующие компоненты
ВАА номер алгоблока 5 код 7 - ввод аналоговых сигналов группы А
ВДБ номер алгоблока 6 код 10 - ввод дискретных сигналов группы Б
МСШ номер алгоблока 7 код 55 - Масштабатор используется в качестве промежуточного клеменника.
|
|
ДВБ номер алгоблока 8 код 14 - вывод дискретных сигналов на имитационную панель.
АВА номер алгоблока 9 код 11 - вывод аналоговых сигналов на имитационную панель ИЛИ номер алгоблока 10 код 72 промежуточный программный клеменник
ОКО номер алгоблока 1,2 код 1 Оперативный контроль сигналов предназначен для вывода информации на лицевую панель регулирующей модели контроллера (в данном примере имеется 2 контура т.е два алгоритма ОКО переключение между контурами осуществляется с помощью кнопок на лицевой панели контроллера.)
Для начала необходимо правильно настроить COM-порт нашей ПЭВМ, которая связана с локальной сетью контроллеров Р-130 [38].
Настройка COM порта для регулирующей модели контроллера представлена на рис. 50.

Рисунок 50 Конфигурация СОМ порта
После того как настройка СOM порта будет выполнена, необходимо приступить к созданию непосредственных компонентов программы, необходимых для обмена.
Для этого выполняются следующие действия: в группе источники приёмники необходимо нажать правую клавишу мыши и выбрать пункт создать группу - PLC.
После создания группы PLC нажатием правой клавиши мыши выбираем компонент REMIKONT-130_Group, в данной работе для удобства было создано четыре таких компонента, названных соответственно DI, DO, AI, AO. Такое распределение обоснованно тем, что в работе может использоваться большое количество сигналов.

Рисунок 51 Создание группы PLC

Рисунок 52 создание компонента REMIKONT-130_Group.
Далее нажимаем правой клавишей мыши на REMIKONT-130_ Group (DI, DO, AI, AO) и выбираем создать компонент REMIKONT-130 (Для удобства обозначены DI1, DO1, AI1, AO1).

Рисунок 53 создание компонента REMIKONT- 130 (DI1)
Далее производится настройка компонента DI1

Рисунок 54 настойка компонента DI1
1. Порт - номер COM порта в системе. Нумерация идёт с 0 то есть, если в системе СОМ-порт имеет номер 1, то в данном пункте выставляется 0.
2. Модуль - номер контроллера в сети «транзит» (Регулирующая модель 2, логическая 3);
3. Переменная - входы или выходы алгоблока. Если переменную необходимо отправить из ТМ6 в Р-130, то выставляется «ВХ», если считать из Р-130, то «ВЫХ»; (В данном примере ВЫХ).
4. Алгоблок - порядковый номер алгоблока в программе (10);
5. Номер ввода вывода - указатель на место получения значения (2 выход алгоблока ИЛИ)
6. Описатель - тип переменной, которую необходимо отправить или считать (дискрет);
7. Направление - Output - переменную отправляют из ТМ6 в Р-130, «Input» - переменную получают из Р-130 (Input).
Для возможности посылки сигналов с Scada системы, на используемых входах алгоритмов необходимо установить тип «Коэффициент».
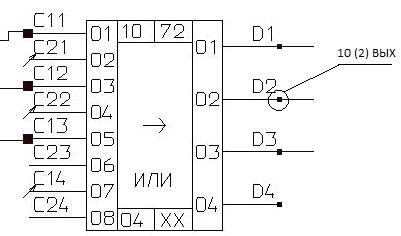
Рисунок 55 Взятие дискретного сигнала с промежуточного программного клеммника
Назначение промежуточного программного клеммника подробно описано в работах [40; 42; 43; 48; 49].

Рисунок 56 настройка компонента DO1
1. Порт - 0.
2. Модуль - 2,
3. Переменная - ВХ
4. Алгоблок - 10;
5. Номер ввода вывода - 2
6. Описатель - (дискрет);
7. Направление - Output - переменную отправляют из ТМ6 в Р-130.

Рисунок 57 Взятие дискретного сигнала с промежуточного программного клеменника

Рисунок 58 Настройка компонента АI1
1. Порт - 0.
2. Модуль - 2,
3. Переменная - ВЫХ
4. Алгоблок - 7;
5. Номер ввода выхода - 1
6. Описатель - (аналог);
7. Направление - input - переменную получают из Р-130.

Рисунок 59 Взятие аналогового сигнала с промежуточного клеммника
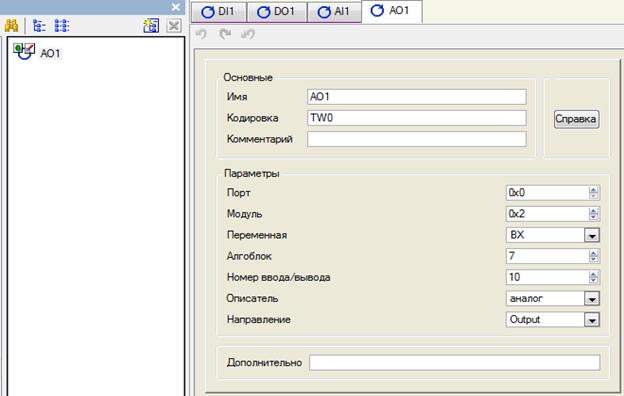
Рисунок 60 Настройка компонента АО1
1. Порт - 0.
2. Модуль - 2,
3. Переменная - ВХ
4. Алгоблок - 7;
5. Номер ввода выхода - 10
6. Описатель - (аналог);
7. Направление - Output - переменную отправляют из ТМ6 в Р-130.
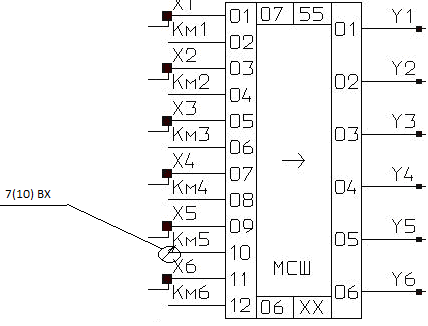
Рисунок 61 Взятие аналогового сигнала с масштабатора (промежуточного клеммника)
После того как будет произведена настройка всех компонентов, необходимо в узле RTM нажав правую клавишу мыши выбрать строчку создать компонент - экран.

Рисунок 62 Создание компонента экран.
После того как был создан экран, необходимо сделать привязку аргументов экрана к созданным ранее компонентам (DI1, DO1, AI1, AO1).
Для этого сначала необходимо включить отображение Аргументом экрана (если они не отображаются по умолчанию) Для этого необходимо выбрать в меню Вид - Аргументы экрана.

Рисунок 63 Настройка аргументов экрана.
После вызова окна аргументов экрана выполняется создание и привязка аргументов.
Для этого необходимо левой кнопкой мыши нажать на Создать аргументы экрана  и выбрать создать. После этого производится привязка. Для корректной работы системы необходимо правильно задать тип данных аргумента и тип передачи. Для дискретных сигналов тип данных BOOL, для аналоговых REAL, направление соответственно IN для DI1, AI1; OUT - DO1 и OUT для AO1.
и выбрать создать. После этого производится привязка. Для корректной работы системы необходимо правильно задать тип данных аргумента и тип передачи. Для дискретных сигналов тип данных BOOL, для аналоговых REAL, направление соответственно IN для DI1, AI1; OUT - DO1 и OUT для AO1.
После создания и настройки выполняется привязка аргументов:

Рисунок 64 Привязка аргументов экрана
Для создания привязки необходимо нажать левой клавишей мыши на поле привязка (созданного аргумента) После чего выбрать Источники приёмники - PLC - DI - DI1 и нажать на кнопку привязка. После этого к аргументу DI1 будет привязано значение ранее созданного компонента DI1. Аналогично делается для остальных созданных аргументов.
После того, как были созданы и привязаны все необходимы аргументы, нужно перейти к созданию компонентов экрана.
Для отображения дискретного сигнала, получаемого с контроллера, используется элемент Выключатель.Выключатель расположен на верхней графической панели в разделе выключатели, для того чтобы выбрать нужный нам вид выключателя, необходимо один раз нажать левой кнопкой мыши на  после чего нажать ещё раз правой кнопкой мыши, тогда появится
после чего нажать ещё раз правой кнопкой мыши, тогда появится  и здесь уже выбираем нужный нам выключатель. После этого настраиваем привязку компонента DI1 к выключателю
и здесь уже выбираем нужный нам выключатель. После этого настраиваем привязку компонента DI1 к выключателю

Рисунок 65 Привязка DI1 к элементу выключатель
Для отображения дискретного сигнала отправляемого в контроллер используется элемент Кнопка, который расположен на верхней графической панели в разделе Кнопки, для того чтобы выбрать нужный нам вид выключателя, необходимо один раз нажать левой кнопкой мыши на  после чего нажать ещё раз правой кнопкой мыши, тогда появится
после чего нажать ещё раз правой кнопкой мыши, тогда появится  и здесь уже выбираем нужную нам кнопку. После этого настраиваем привязку компонента DO1 к выключателю.
и здесь уже выбираем нужную нам кнопку. После этого настраиваем привязку компонента DO1 к выключателю.
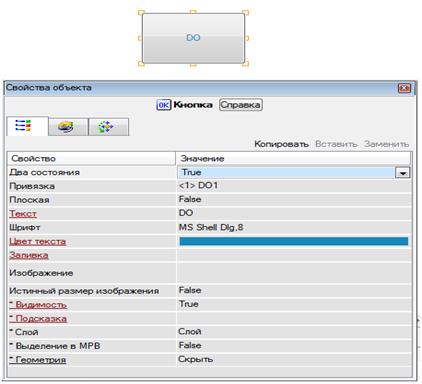
Рисунок 66 Привязка DO1 к элементу кнопка.

Рисунок 67 Привязка DO1 к элементу кнопка 2 часть.
для того чтобы задать кнопке состояния переключения необходимо нажать правой клавишей мыши на Mouse Press и выбрать передать значение.
Для отображения аналогового сигнала получаемого с контроллера используется элемент Тренд расположенный на верхней графической панели в разделе Тренды, для того чтобы выбрать нужный нам вид тренда, необходимо один раз нажать левой кнопкой мыши на  после чего нажать ещё раз правой кнопкой мыши, тогда появится
после чего нажать ещё раз правой кнопкой мыши, тогда появится  и здесь уже выбираем нужный нам тренд. После этого настраиваем привязку компонента AI1 к тренду.
и здесь уже выбираем нужный нам тренд. После этого настраиваем привязку компонента AI1 к тренду.

Рисунок 68 Привязка AI1 к элементу тренд.
Для того чтобы привязать кривую АI1 к тренду необходимо выбрать вкладку кривые, на ней правой кнопкой мыши нажать на строку кривые и выбрать кривую.
. 
Рисунок 69 Привязка AI1 к элементу тренд часть 2
Для отображения аналогового сигнала передаваемого контроллеру используется элемент Ползунок расположенный на верхней графической панели в разделе Приборы, для того чтобы выбрать нужный нам вид прибора, необходимо один раз нажать левой кнопкой мыши на  , после чего нажать ещё раз правой кнопкой мыши, тогда появится
, после чего нажать ещё раз правой кнопкой мыши, тогда появится  и здесь уже выбираем нужный нам ползунок. После этого настраиваем привязку компонента AО1 к ползунку.
и здесь уже выбираем нужный нам ползунок. После этого настраиваем привязку компонента AО1 к ползунку.

Рисунок 70 Привязка AО1 к элементу ползунок
Для того чтобы изменять величину аналогового сигнала от 0 необходимо задать это значение в отображаемой величине.
Для отображения аналогового сигнала передаваемого контроллеру используется так же элемент текст, с помощью данного элемента можно отслеживать численное значение изменяемого или задаваемого сигнала. Элемент текст расположен на верхней графической панели

Рисунок 71 Привязка AО1 к элементу текст
Для отображения численного значения необходимо задать в разделе Вид индикации параметр значение, после этого появится возможность привязки выбранного компонента.
В итоге экран должен выглядеть:

Рисунок 72 Общий вид реализации программы связи в Trace mod
Для запуска программы необходимо выбрать узел RTM после этого нажать на иконку сохранить для МРВ  и запустить профайлер
и запустить профайлер  , для корректной работы программа, написанная в ReditorXP, должна быть загружена в контроллер, после этого ReditorXP необходимо закрыть, и только тогда запускается программа, написанная на TRACE MODE 6.
, для корректной работы программа, написанная в ReditorXP, должна быть загружена в контроллер, после этого ReditorXP необходимо закрыть, и только тогда запускается программа, написанная на TRACE MODE 6.
14 Программа сигнализации на контроллере ПЛК-154[30]
|
|
|

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!