ЭДС и частота в обмотке ротора зависят от скорости пересечения вращающим полем проводника обмотки ротора, т. е. от разности частоты вращения поля nо и ротора nр. Чем больше разность (n0 — nр), тем большая индуцируется э.д.с. и тем выше ее частота изменения. Следовательно, необходимым условием для возникновения в асинхронном двигателе вращающего момента является неравенство (асинхронность) частот вращения n0 и nр Именно поэтому двигатель и называется асинхронным (не синхронным). Разность частоты вращения поля статора и ротора характеризуется коэффициентом скольжения s = (n0 — nр) /n0.
Если асинхронная машина нормального исполнения, то при номинальном режиме работы скольжение должно быть в промежутке 0,01—0,1. С появлением нагрузки на валу двигателя оно повышается, что вызывает увеличение тока в обмотке ротора, а следовательно, и электромагнитного момента. Чем ниже величина скольжения, тем экономичнее работает двигатель. Вращающееся поле, которое создает обмотка статора, может быть двухполюсным, четырехполюсным и т. д. Число пар полюсов – определяют при проектировании обмотки статора. При одной и той же частоте тока в обмотке статора многополюсное поле будет вращаться медленнее, пропорционально числу пар полюсов, что часто используется при ступенчатом регулировании частоты вращения.
Важными эксплуатационными характеристиками асинхронных машин, работающих в приводах главного движения станков, являются их максимальная перегрузочная способность и кратность пускового момента (отношение максимального момента к номинальному).
Перегрузочной способностью Км называют отношение максимального момента Мтах,, развиваемого двигателем, к номинальному Мн. Это отношение составляет обычно Ки = Мтах/Мн = 1,8 — 2,5. Момент, развиваемый двигателем при пуске (nр= 0), называется пусковым моментом.
Отношение пускового момента к номинальному называют кратностью пускового момента Кп = Мпуск/Мн. Кратность пускового момента составляет 1,1 —1,8.
Чем выше перегрузочная способность Км, тем выше способность двигателя к перегрузкам. Больший пусковой момент Кп соответствует двигателям со значительным моментом нагрузки на валу.
Пуск асинхронного двигателя с короткозамкнутым ротором сопровождается довольно большим скачком пускового тока. Он иногда может в семь-десять раз превышать номинальный. Обычно двигатели малой мощности пускают прямым пуском.К числу таких двигателей относятся и двигатели приводов металлорежущих станков. Пуск мощных асинхронных приводов сопровождается большой просадкой напряжения, поэтому их пуск производят через различные пусковые устройства или пускают на холостом ходу.В некоторых механизмах иногда требуется плавный разгон двигателя. В этом случае наиболее эффективен пуск с помощью тиристорного блока управления, позволяющего плавно увеличивать частоту питающего напряжения.
Скорость вращения асинхронных двигателей с короткозамкнутым ротором как правило регулируют либо изменением числа пар полюсов, либо изменяют частоту и величину питающего напряжения на статоре машины. Первый способ позволяет довольно просто осуществить лишь ступенчатое регулирование, причем чем больше число пар полюсов обмотки, тем ниже частота вращения. При втором способе достигается плавность регулирования в широком диапазоне, но требуются специальные сложные и дорогостоящие электронные системы управления.
На станках применяют в основном общепромышленные асинхронные двигатели единых серий 4А и АИ (рис. 2.4).
Диапазон мощности выпускаемых двигателей единых серий полностью обеспечивает все потребности станкостроения. В состав этих серий также входят асинхронные двигатели специального исполнения: с повышенной точности по установочным раз мерам; со встроенным электромагнитным тормозом; с повышенным пусковым моментом.
В маркировке асинхронного двигателя указывается его конструктивное исполнение, материал подшипниковых щитов и станины, высота оси вращения, установочные размеры, число пар полюсов и климатическое исполнение. Например, 4А80А2УЗ — асинхронный электродвигатель четвертой серии (4А). Тип исполнения — закрытое (А), высота оси вращения 80 мм, количество пар полюсов — два (2) исполнение для умеренного климата (УЗ).
Во многих станках для подачи масла и охлаждающих жидкостей широко применяются электронасосы серий П и ПА, объединяющие в едином корпусе центробежный насос и нерегулируемый приводной асинхронный двигатель. Мощность и соответственно габаритные размеры электронасосов зависят от количества жидкости, подаваемой в единицу времени. Обычно их мощность составляет 0,1—0,6 кВт.
Электрошпиндели
К асинхронным электродвигателям относятся также широко
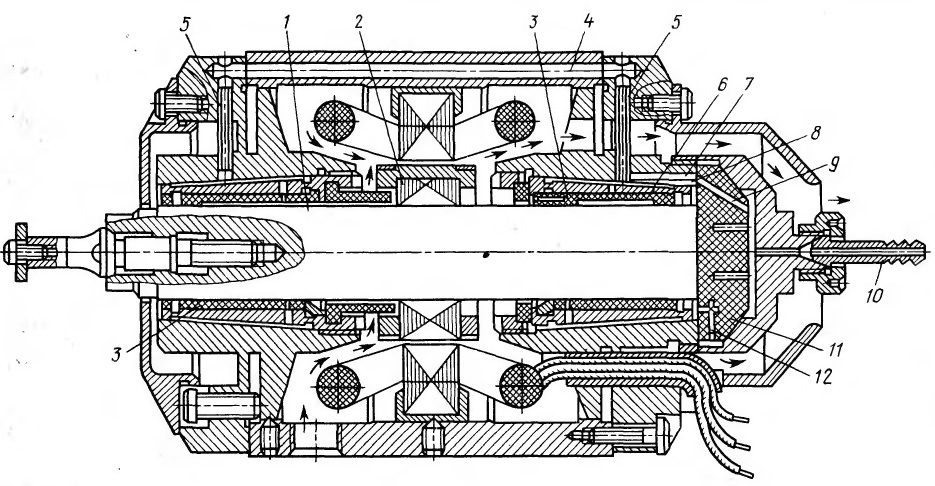 Рис.2.5. Электрошптндель
Рис.2.5. Электрошптндель
где: 1 — вал, 2 — ротор, 3 — подшипники, 4 — отверстие для подвода воздуха, 5 — трубка, 6 — воздушная камера, 7, 8, 9 — воздушные каналы, 10 — штуцер, 11 — подпятник, 12 — канал отработанного воздуха.
используемые в шлифовальных станках электрошпиндели. Электрошпиндель представляет собой встроенный асинхронный электродвигатель, на валу которого без промежуточных передач закреплен шлифовальный круг. Частота вращения электрошпинделей составляет 13 000—14 000 об/мин и выше. Столь высокая частота вращения достигается путем питания статорной обмотки токами высокой частоты. Поэтому электрошпиндели управляются специальными устройствами, преобразующими токи промышленной частоты (чаще всего 50 Гц) в токи высокой частоты (до 1000—2000 Гц).
Одним из наиболее важных узлов, ограничивающих допустимую частоту вращения шпинделя, являются опоры, в которых он вращается. В настоящее время применяют опоры обычно трех видов: гидравлические, шариковые и воздушные. Наименьшими потерями и наибольшей долговечностью обладают электрошпиндели на воздушных опорах. На рис. 2.5 изображен разрез такого электрошпинделя.
Вал 1 встроенного электродвигателя вращается в подшипниках 3 с воздушной смазкой. Между торцом вала и подпятником 11 создается воздушная подушка. Подшипники 3, состоящие из латунных вставок и графитовых вкладышей, вклеены в передний и задний щиты корпуса электрошпинделя. Через штуцер 10 и каналы 9, 7 воздух подается в камеру 6, откуда поступает в смазываемый зазор между вращающейся и неподвижной поверхностями. К переднему подшипнику воздух подводится через трубку 5 и отверстие 4. Отработанный воздух отводится по каналу 12. Для нормального безаварийного пуска электрошпинделя, в него подают воздух, для образования воздушной подушки между вкладышами и шпинделем. Данные подушки предназначены для устранения трение и уменьшения износа подшипников при пуске, создают также плавность вращения шпинделя.
В качестве преобразователей частоты для питания высокоскоростных двигателей электрошпинделей применяют как электромашинные (серии ГИС), так и электронные статические преобразователи частоты.
В связи с прогрессом в области создания электронных преобразователей частоты асинхронные электродвигатели находят применение не только в главных приводах, но и благодаря возможности плавного регулирования их частоты вращения в широких пределах в приводах подач современных металлорежущих станков.







