ТрикоптерCanberra UAV с бензиновым двигателем. Смотрите сообщение в блоге здесь
Двигатели внутреннего сгорания могут увеличить время полета, но необходимо соблюдать осторожность, чтобы справиться с дополнительной сложностью и повышенной вибрацией.
Что купить
· Газовый двигатель и модуль зажигания
· RC-переключатель для управления питанием модуля зажигания, как этот, с сайта milehighrc.com.
· Опционально электрический стартер, подобный этому, от milehighrc.com.
Подключение и конфигурация
Выключатель зажигания двигателя и (дополнительно) стартер должны быть подключены к выходам сервопривода автопилота Ignitionи Starter(см. раздел «ДВС» в разделе « Функции выходов автопилота » ).
Чтобы позволить пилоту напрямую управлять зажиганием и (опционально) стартером с передатчика, необходимо настроить проход RC:
· Установите SERVOx_FUNCTION(где «x» — выходной канал автопилота, подключенный к зажиганию или стартеру) на RCINy(где «y» — канал передатчика). Например, установите SERVO8_FUNCTION = 59/”RCIN9”, чтобы разрешить каналу 9 передатчика управлять выходом 8 автопилота.
Обязательно проверьте поведение двигателя, когда передатчик выключен, чтобы смоделировать то, что произойдет во время отказоустойчивости RC.
Примечание
Двигатель можно запускать и останавливать в автономных миссиях с помощью команды DO_ENGINE_CONTROLMission. Это полезно перед NAV_VTOL_TAKEOFF или NAV_VTOL_LAND для запуска или остановки двигателя, чтобы предотвратить удары винта при посадке на ветру с винтом с малым зазором. См . раздел Команды миссии .
Виброизоляция
Высокая вибрация от двигателей внутреннего сгорания означает, что гашение вибрации имеет решающее значение. Часто необходимо установить автопилот на пластину с добавлением самоклеящихся свинцовых грузов для увеличения его массы.
KDE CAN ESC
KDECAN ESC — это высококлассные ESC, которые обеспечивают управление и обратную связь с использованием пользовательского протокола CAN.
Примечание
Пожалуйста, используйте Copter-4.1 (или выше), Plane-4.1 (или выше) или Rover-4.1 (или выше) с этими ESC, потому что, хотя более ранние версии ArduPilot их поддерживали, были проблемы с диапазоном и порядком двигателей, которые делали настройку трудный.
Где купить
· KDE-UAS125UVC-HE и KDE-UAS85UVC можно приобрести на сайте KDEDirect.com (другие ESC KDE также могут поддерживать CAN, проверьте изображения ESC, те, у которых сбоку написано «CAN», должны работать).
· Также требуется комплект проводов KDECAN.
Настройка ESC
Инструкции KDE по подключению и настройке с помощью ArduPilot находятся здесь.
· Загрузите, установите и запустите KDE DirectDeviceManager .
· Подключите первый ESC к компьютеру с помощью USB-кабеля и настройте устройство, как показано ниже.
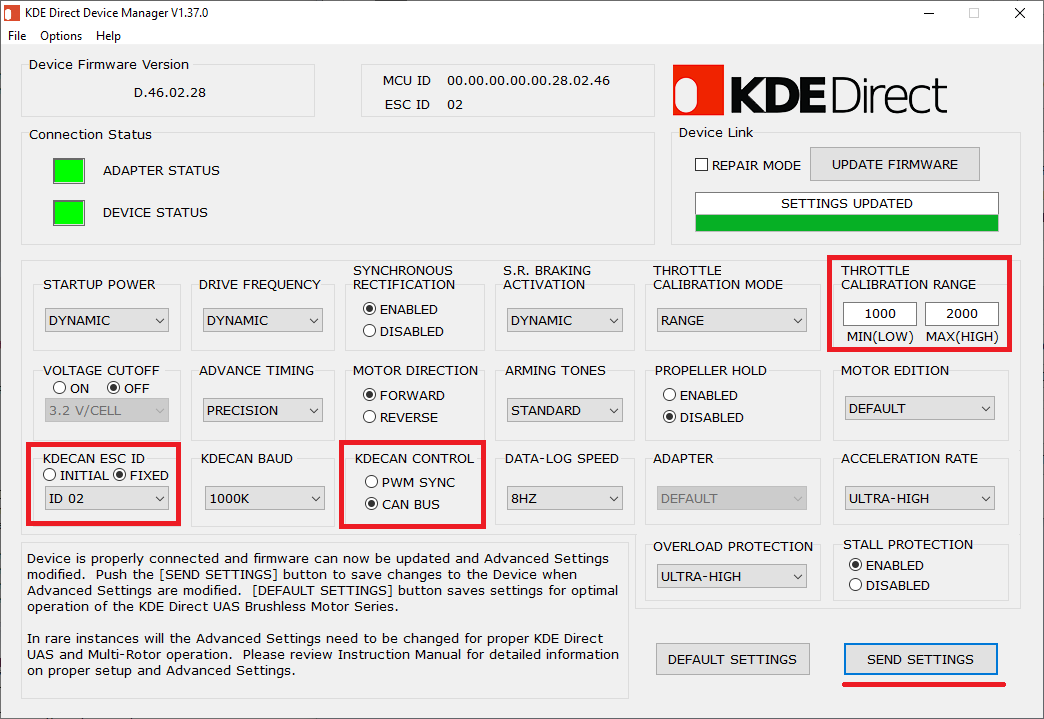
· Повторите настройку всех остальных ESC, каждый раз увеличивая «KDECAN ESC ID» на единицу. Лучше всего пометить ESC номером, который является идентификатором ESC - 1. Несколько сбивает с толку самый низкий идентификатор ESC - 02, но это будет отражать выход SERVO1 автопилота.
Подключение ESC
· В 4-контактном кабеле, соединяющем первый ESC с портом CAN1 автопилота, все контакты должны быть переставлены местами на одном конце (в идеале на том конце, который подключается к первому ESC). Pin1 (красный) следует поменять местами с Pin4. Pin2 следует поменять местами с Pin3. Этот модифицированный кабель следует использовать для подключения порта CAN1 автопилота к первому ESC.
· ESC должны быть последовательно соединены вместе с помощью комплекта проводов KDECAN. Терминатор CAN (4-контактный разъем с черной петлей) должен быть подключен к последнему ESC в цепочке.

Предупреждение
При использовании автопилота CubeBlack метки CAN1 и CAN2 меняются местами. В этих инструкциях предполагается, что ESC подключены к порту CAN1, который на автопилотах CubeBlack помечен как «CAN2».
Конфигурация
· Установите CAN_D1_PROTOCOL = 8 (KDECAN)
· Установите CAN_P1_DRIVER = 1 (Первый драйвер), чтобы указать, что ESC подключены к порту CAN1.
· Установите MOT_PWM_MIN = 1000 и MOT_PWM_MAX = 2000, чтобы ArduPilot использовал выходной диапазон, соответствующий входному диапазону ESC.
· Установите CAN_D1_KDE_NPOLE на количество полюсов двигателя (обратите внимание, что может потребоваться перезагрузка автопилота, чтобы этот параметр появился). Если вы не уверены в количестве, вы, вероятно, можете сосчитать их, внимательно посмотрев на верхнюю часть двигателя. Даже при неправильной настройке двигатели должны нормально вращаться, потому что это число используется только для расчета числа оборотов в минуту, сообщаемого наземной станции и сохраняемого в бортовых журналах.
Регистрация и отчетность
ESC KDECAN возвращают автопилоту информацию, которая записывается в сообщениях ESCn бортового журнала автопилота и может быть просмотрена в любом средстве просмотра журнала, совместимом с ArduPilot . Эта информация включает:
· об/мин
· Напряжение
· Текущий
· Температура регулятора скорости
· Общий ток
Сообщения RCOU также записываются во бортовые журналы, в которых содержится запрошенный уровень выходного сигнала, отправленный на ESC, выраженный числом от 1000 (что означает остановку) до 2000 (что означает полный выходной сигнал).
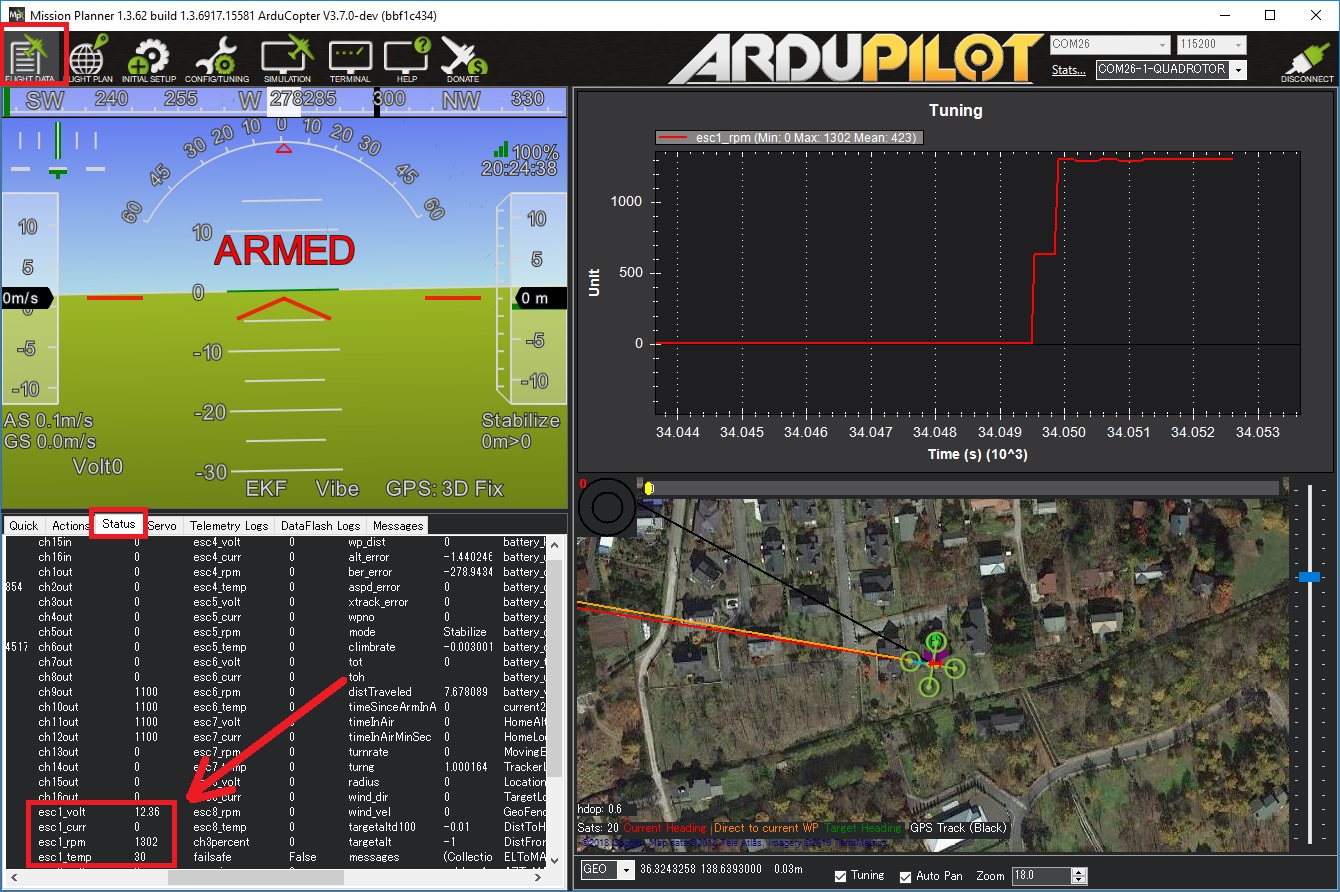
Эту информацию также можно просмотреть в режиме реального времени с помощью наземной станции. Если вы используете планировщик миссий, перейдите на вкладку статуса экрана FlightData и найдите esc1_rpm.
Примечание
Для отправки данных ESC в GCS требуется использование MAVLink2. Убедитесь, что соответствующий параметр SERIALx_PROTOCOL равен 2 (где «x» — это номер последовательного порта, используемый для подключения телеметрии).
Toshiba CAN ESC
ESC ToshibaCAN — это высококлассные ESC, которые обеспечивают управление и обратную связь с использованием специального протокола CAN. Некоторые дополнительные характеристики:
· FOC, который должен увеличить время полета примерно на 10%, а также быть тише, чем ESC без FOC.
· Аккумуляторы до 7S (в будущих версиях планируется до 12S), 50А
· До 12 двигателей
· Быстрое время устранения проблемы с синхронизацией (от 100 до 150 мс)
· Относительно легкий
· Разработано и произведено в Японии
Примечание
Поддержка этих ESC включена в Copter-4.0 (и выше), Plane-3.10 (и выше) и Rover-3.5 (и выше).
Где купить
Эти ESC можно приобрести, связавшись напрямую со следующими компаниями (замените «AT» на «@» в адресах электронной почты)
· Toshiba USA: Alan.Li AT taec.toshiba.com
· ХикариАльфаксЯпония: masaki_nakamura AT h-ax.com
Также требуются разветвительные платы CAN, платы, используемые в приведенном выше видео, были предоставлены EAMS Lab , но их также нет в продаже.
Подключение и конфигурация
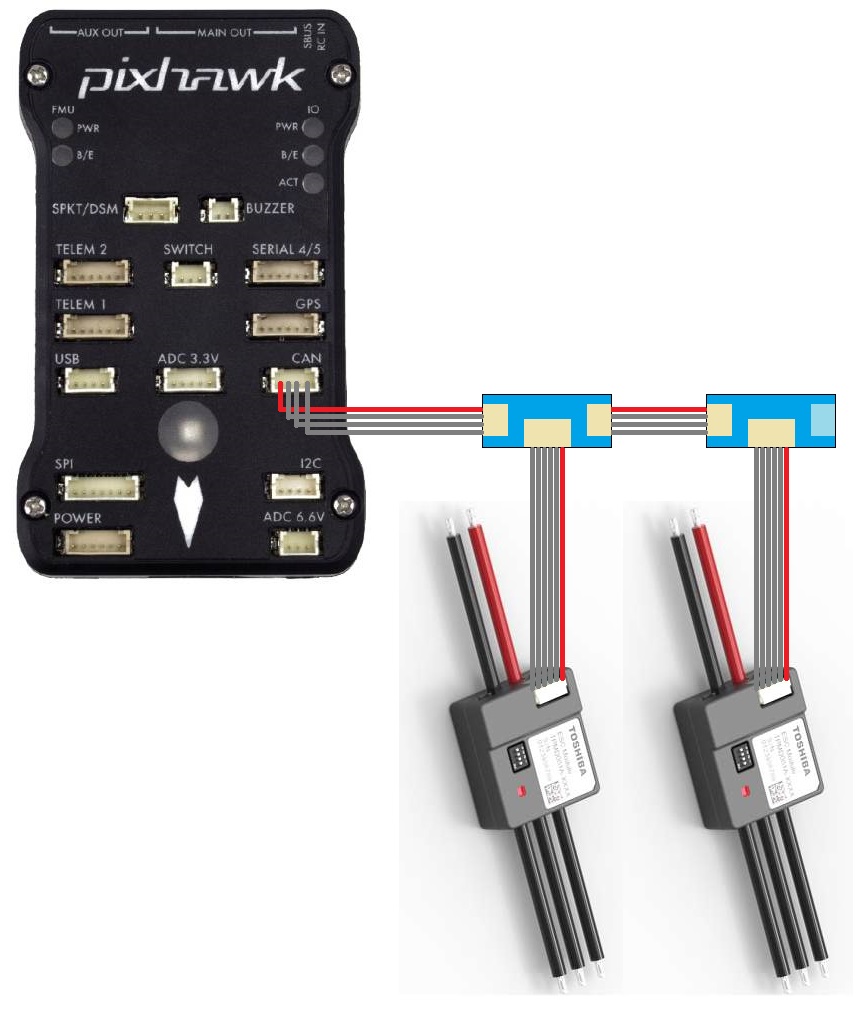
· ESC должны быть последовательно соединены вместе с помощью разделительных плат CAN, а затем один 4-контактный кабель CAN должен быть подключен к порту CAN автопилота. Обратите внимание, что последняя плата-разветвитель имеет терминатор (т.е. без порта) с одной стороны.
Предупреждение
При использовании автопилота Cube метки CAN1 и CAN2 меняются местами. В этих инструкциях предполагается, что ESC подключены к порту CAN1, который на автопилотах Cube помечен как «CAN2».
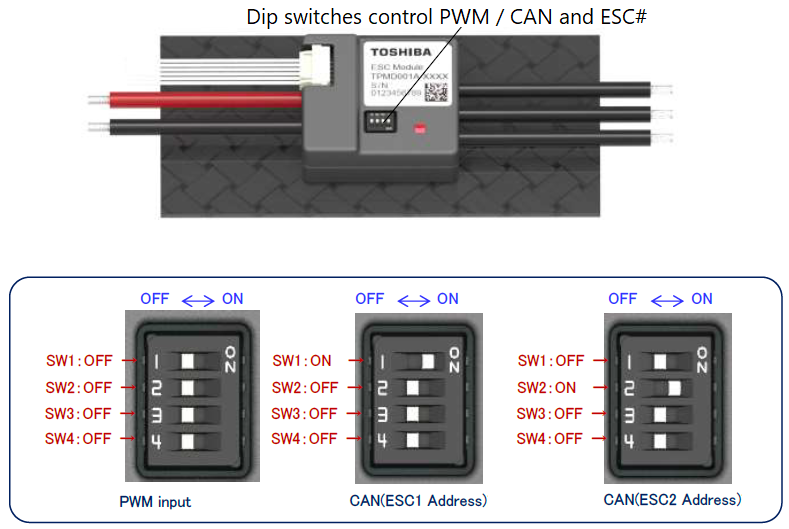
· Установите DIP-переключатели на каждом ESC, чтобы указать его уникальный номер. Этот номер также сопоставляет ESC с эквивалентным выходом PWM на задней панели автопилота. Например, ESC 1 будет реагировать так же, как обычный PWM ESC, подключенный к MAIN OUT 1 автопилота. По умолчанию это сопоставление также соответствует диаграммам порядка работы двигателей .
· Установите CAN_D1_PROTOCOL = 3 (ToshibaCAN)
· Установите CAN_P1_DRIVER = 1 (Первый драйвер), чтобы указать, что ESC подключены к порту CAN1.
· Установите MOT_PWM_MIN = 1000 и MOT_PWM_MAX = 2000, чтобы ArduPilot использовал выходной диапазон, соответствующий входному диапазону ESC.
· Установите MOT_SPIN_ARM = 0,03, что означает, что двигатели будут вращаться с 3% от полной тяги при включении.
· Установите MOT_SPIN_MIN = 0,05, что означает, что двигатели будут вращаться не менее чем на 5% от полной тяги во время полета.
Регистрация и отчетность
ESC ToshibaCAN возвращают автопилоту информацию, которая записывается в сообщениях ESCn бортового журнала автопилота и может быть просмотрена в любом средстве просмотра журнала, совместимом с ArduPilot . Эта информация включает:
· об/мин
· Напряжение
· Текущий
· Температура регулятора скорости
· Общий ток
· Температура двигателя (если подключен дополнительный датчик температуры двигателя)
Сообщения RCOU также записываются во бортовые журналы, в которых содержится запрошенный уровень выходного сигнала, отправленный на ESC, выраженный числом от 1000 (что означает остановку) до 2000 (что означает полный выходной сигнал).
Эту информацию (кроме температуры двигателя) также можно просмотреть в режиме реального времени с помощью наземной станции. Если вы используете планировщик миссий, перейдите на вкладку статуса экрана FlightData и найдите esc1_rpm.
Примечание
Для отправки данных ESC в GCS требуется использование MAVLink2. Убедитесь, что соответствующий параметр SERIALx_PROTOCOL равен 2 (где «x» — это номер последовательного порта, используемый для подключения телеметрии).





