Установите MOT_PWM_TYPE для желаемой скорости передачи данных и перезагрузите автопилот.
· DShot150 на скорости 150 кбод (рекомендуется для больших самолетов с длинными сигнальными проводами)
· DShot300 на скорости 300 кбод
· DShot600 на скорости 600 кбод (рекомендуется для большинства автомобилей)
· DShot1200 на скорости 1200 кбод
Для более крупных самолетов с более длинными кабелями, использующими протокол DShot ESC, мы рекомендуем использовать самую низкую скорость передачи данных, DShot150, так как это самый надежный протокол (более низкие скорости передачи менее чувствительны к помехам в кабелях).
Для небольших судов DShot600, безусловно, наиболее широко используется и поэтому может быть более подходящим выбором просто из-за количества проведенных испытаний, а не более нового протокола DShot1200.
Более высокие скорости (например, DShot600 и DShot1200) более чувствительны к шуму, но имеют то преимущество, что они связывают выделенный канал прямого доступа к памяти на меньшее время, что может быть полезно для полетных контроллеров с большим количеством совместного использования прямого доступа к памяти.
Если будет использоваться двунаправленный DShot, предпочтительнее использовать DShot300 и DShot600, поскольку для этой функции требуется импульс большей длительности, поскольку для отправки другого импульса необходимо дождаться ответа от ESC. Двунаправленный DShot не использует каналы DMA, поэтому не влияет на другие периферийные устройства. Двунаправленный DShot поддерживается только регуляторами BLHeli32.
Настройка функций сервопривода
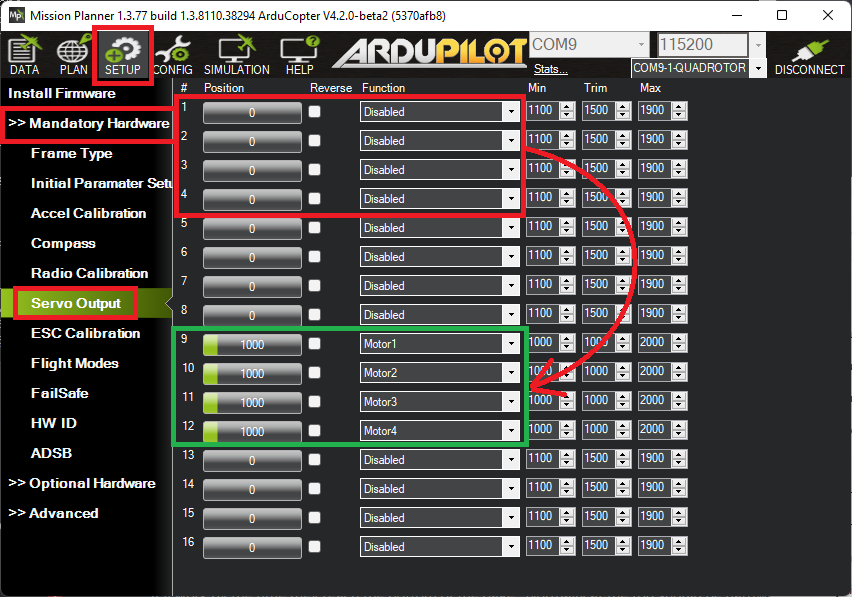
Как упоминалось выше, при использовании автопилота с IOMCU (например, Pixhawk, CubeOrange) регуляторы скорости должны быть подключены к выходам AUX, а не к выходам MAIN по умолчанию. Это, в свою очередь, означает, что соответствующие параметры SERVOx_FUNCTION должны быть обновлены, чтобы автопилот знал, какой выход подключен к ESC/двигателям. Проще всего это сделать с помощью страницы MissionPlanner «ServoOutput».
Примечание
Когда выход сконфигурирован для DShot, SERVOx_MIN/MAX/TRIMпараметры этого выхода всегда будут игнорироваться, так как DShot не использует эти параметры. Используемое значение обрезки будет 1500, если это обратимый выход, или 1000, если нормальная настройка вывода в DShot, а диапазон вывода всегда будет 1000-2000. Шаг калибровки ESC не требуется.
Примечание
Всю конфигурацию на основе маски можно изменить только на уровне группы ШИМ, пожалуйста, обратитесь к документации вашего полетного контроллера, чтобы узнать, какие выходы относятся к разным группам. См . раздел «Смешивание протоколов ESC » ниже.
Предупреждение
Убедитесь, что ваш ESC поддерживает выбранную вами конфигурацию. В противном случае может произойти повреждение. Это включает частоту кадров, обсуждаемую ниже. Также будьте осторожны при переключении между цифровым и аналоговым выходом без повторной калибровки ESC, так как это может привести к неуправляемому выходу двигателя.
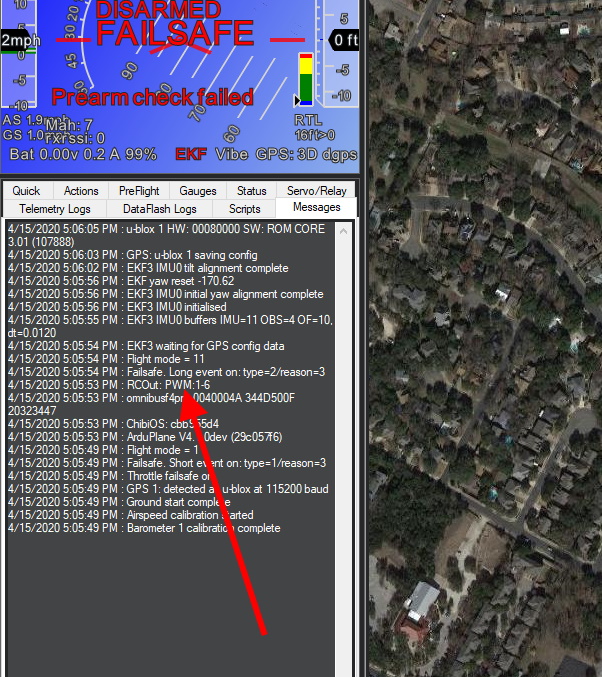
Проверьте баннер RC
Перезагрузите автопилот и проверьте «баннер RC», чтобы убедиться, что выходные каналы настроены должным образом (этот баннер появляется всякий раз, когда загружаются параметры).

Дополнительная конфигурация
Частота обновления DShot
Частоту, с которой отправляются импульсы DShot, можно настроить с помощью SERVO_DSHOT_RATE . По умолчанию ArduPilot будет выводить импульс данных DShot каждый раз, когда будет готов новый образец IMU, и с фиксированным интервалом 1 кГц. На коптере со стандартной частотой цикла планировщика 400 Гц это работает на частоте около 1,4 кГц. Однако вывод довольно нерегулярный - чтобы получить более регулярный вывод SERVO_DSHOT_RATEможно настроить для отправки импульсов со скоростью, кратной циклической частоте планировщика. Таким образом, если установлено значение 2, импульсы будут отправляться с частотой 800 Гц, значение 3 — с частотой 1,2 кГц и так далее. Разница заключается в очень, очень равномерной мощности, которая может принести пользу коптерам, нуждающимся в более жестком управлении двигателем (например, небольшим гонщикам). Не рекомендуется отправлять импульсы с частотой менее 1 кГц из-за сообщений о том, что BLHeli32 иногда пропускает кадры на некоторых полетных контроллерах, аналогичным образом отправка с более высокой частотой может привести к повышению надежности и более быстрому восстановлению после пропущенных импульсов, где это необходимо, за счет некоторого процессорного времени. Очень высокие частоты можно использовать только для более высоких скоростей DShot, поскольку в противном случае импульсы могут перекрываться — например, максимальная скорость, которую теоретически может поддерживать DShot150, составляет 4 кГц.
Команды DShot
На некоторых регуляторах поддерживаются команды DShot. Они позволяют полетному контроллеру управлять такими функциями, как светодиоды ESC, звуковые сигналы и направление вращения двигателя. Чтобы использовать команды DShot:
· установить SERVO_DSHOT_ESC = 1 (BLHeli32/BLHeli_S/Kiss)
· установите флажок « DShot » NTF_LED_TYPES, чтобы включить управление светодиодами ESC
· установите флажок « DShot » NTF_BUZZ_TYPES, чтобы включить использование двигателей в качестве зуммеров
Текущие поддерживаемые команды:
· Светодиоды DShot вкл./выкл.
· Звуковой сигнал DShot вкл./выкл.
· Изменить направление вращения двигателя (см . параметр SERVO_BLH_RVMASK )
· Реверсивный DShot (также известный как 3D-режим) (см. Реверсивный ESC DShot )
Предупреждение
В настоящее время ArduPilot поддерживает набор команд ( SERVO_DSHOT_ESC = 1), который обычно используется, однако появляются другие, которые могут быть несовместимы, что приводит к неопределенной операции. Соблюдайте осторожность (удалите лопасти!) до тех пор, пока не будет проверена правильная работа с использованием type=1 для вашего ESC.
Смешивание протоколов ESC
В то время как все выходы сервопривода/мотора автопилота ArduPilot способны работать в обычном режиме ШИМ с частотой кадров 50 Гц и выше, не все из них поддерживают другие конфигурации протокола ESC. И, как правило, эти конфигурации должны применяться к предварительно назначенным группам выходов, даже если они не все управляют ESC. Таким образом, применяются следующие предостережения:
1. 8 «ГЛАВНЫХ» выходов автопилотов, использующих IOMCU (например, PixHawk и Cube), нельзя использовать для DShot. На этих автопилотах только дополнительные выходы «AUX» поддерживают DShot. Если вы попытаетесь установить «ГЛАВНЫЙ» выход на DShot, произойдет обычный выход PWM, даже если он был настроен на протокол DShot.
2. Для Pixracer и других плат без отдельного сопроцессора IOMCU можно использовать все выходы сервопривода/двигателя.
3. Группы выходов с общим таймером ДОЛЖНЫ иметь одинаковую расширенную конфигурацию. Обычно они указаны в описании аппаратного обеспечения автопилота, ссылка на которое приведена на странице « Параметры аппаратного обеспечения автопилота ». Например, если выход сконфигурирован для DShot в группе, то вы не можете использовать другой выход в этой группе для нормального PWM ESC или нормальной работы сервопривода PWM.
Примечание
Каждый раз, когда автопилот инициализируется, он отправляет сообщение на наземную станцию управления, показывая, какие выходы являются PWM/Oneshot/или DShot. Остальные выходы с более высокими номерами назначаются как GPIO.