В большинстве автомобилей ArduPilot используются бесщеточные двигатели, управляемые бесщеточными двигателями ESC. Наиболее распространенными протоколами, используемыми этими ESC, являются PWM, OneShot, OneShot125 и DShot . На этой странице описаны первые три (PWM, OneShot и OneShot125).
Предупреждение
Убедитесь, что ваш ESC поддерживает выбранную вами конфигурацию. В противном случае может произойти повреждение. Это включает частоту кадров, обсуждаемую ниже. Также будьте осторожны при переключении между протоколами без перезагрузки или повторной калибровки ESC, так как это может привести к неуправляемому выходу двигателя.
ШИМ
Это наиболее распространенные ESC для некоптерных приложений, и исторически они были первыми бесколлекторными ESC.

PWM ESC используют периодический входной импульс шириной обычно от 1000 мкс до 2000 мкс для нулевой и полной мощности соответственно.
· Установите для MOT_PWM_TYPE значение 0/Нормальный (по умолчанию) и перезагрузите автопилот.
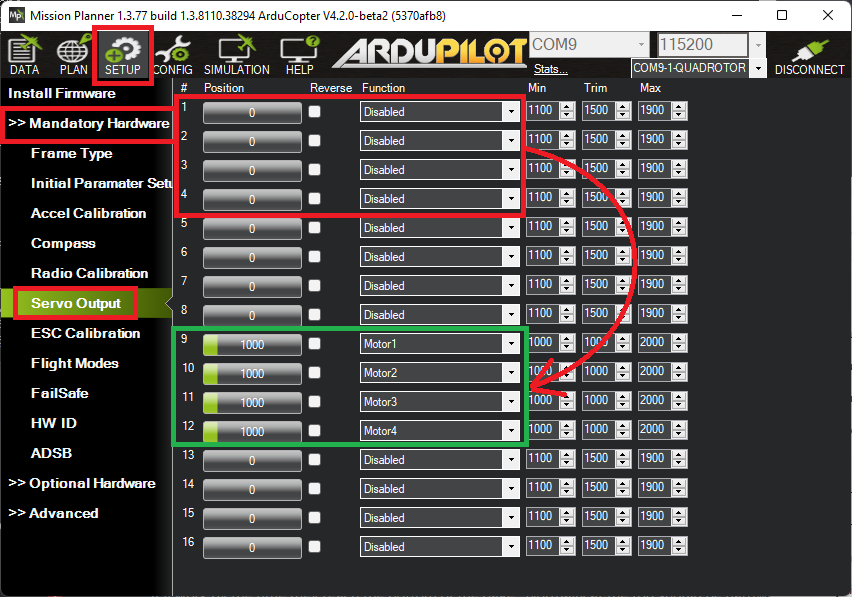
· MOT_PWM_MIN и MOT_PWM_MAX определяют диапазон ШИМ, отправляемый на двигатели (например, где SERVOx_FUNCTION = «Motor1», «Motor2» и т. д.). См. Калибровка ESC для получения информации о согласовании выходного диапазона автопилота с входным диапазоном ESC.
Частота кадров этих импульсов обычно составляет от 50 Гц до 490 Гц. Более высокая частота кадров позволяет быстрее отправлять управляющие реакции на двигатель, если ESC поддерживает такую частоту кадров.
· Установите RC_SPEED , чтобы изменить частоту кадров (по умолчанию 490 Гц).
Примечание
убедитесь в возможностях вашего ESC, прежде чем выбирать более высокую частоту кадров, чтобы избежать повреждения ESC.
Один выстрел
OneShot (не путать с «OneShot125») — это более старый протокол, который использует ту же ширину импульса, что и обычный ШИМ, но имеет фиксированную частоту кадров, равную скорости основного цикла автопилота. Преимуществ использования этого протокола по сравнению с обычным ШИМ немного.
· Установите для MOT_PWM_TYPE значение 1 (OneShot) и перезагрузите автопилот.
Ваншот 125
Протокол OneShot125 (иногда ошибочно сокращаемый до OneShot) похож на обычный PWM, за исключением того, что ширина импульса делится на коэффициент 8, что обеспечивает более быструю связь от автопилота к ESC. Отдельные импульсы отправляются быстрее, а общую частоту кадров можно увеличить до 490 Гц.
· Установите для MOT_PWM_TYPE значение 2 (OneShot125) и перезагрузите автопилот.
При использовании автопилота с IOMCU (например, Pixhawk, CubeOrange) ESC должны быть подключены к выходам AUX, а соответствующие значения SERVOx_FUNCTION должны быть установлены на «Motor1» и т. д. Это проще всего сделать с помощью «ServoOutput» Планировщика миссий. страница
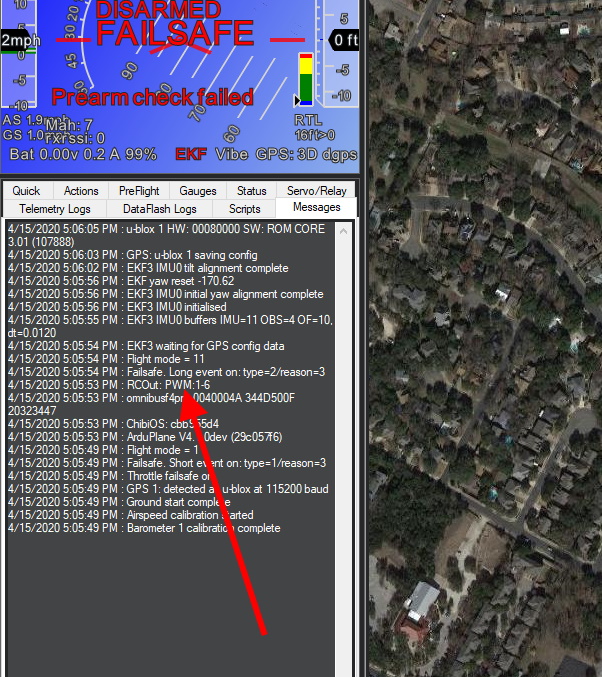
Перезагрузите автопилот и проверьте «баннер RC», чтобы убедиться, что выходные каналы настроены должным образом (этот баннер появляется всякий раз, когда загружаются параметры).

Смешивание протоколов ESC
В то время как все серво/моторные выходы автопилота ArduPilot способны работать в обычном ШИМ с частотой кадров 50 Гц, не все из них поддерживают другие протоколы ESC. И, как правило, эти конфигурации должны применяться к предварительно назначенным группам выходов, даже если они не все управляют ESC. Таким образом, применяются следующие предостережения:
1. 8 «ГЛАВНЫХ» выходов автопилотов, использующих IOMCU (таких как PixHawk и Cube), нельзя использовать для протоколов, отличных от Normal PWM и OneShot. На этих автопилотах только дополнительные выходы «AUX» могут должным образом поддерживать OneShot125. Если вы попытаетесь установить для «ГЛАВНОГО» выхода значение OneShot125, произойдет обычный выход ШИМ, даже если он был настроен на протокол OneShot125.
2. Для Pixracer и других плат без отдельного сопроцессора IOMCU можно использовать все выходы сервопривода/двигателя.
3. Группы выходов с общим таймером ДОЛЖНЫ иметь одинаковую расширенную конфигурацию. Обычно они указаны в описании аппаратного обеспечения автопилота, ссылка на которое приведена на странице « Параметры аппаратного обеспечения автопилота ». Например, если выход сконфигурирован для OneShot125 в группе, то вы не можете использовать другой выход в этой группе для нормальной работы PWM ESC или нормальной работы сервопривода PWM.
Примечание
Каждый раз, когда автопилот инициализируется, он отправляет «RC Banner» на наземную станцию управления, показывая, какие выходы являются PWM, OneShot, OneShot125 или DShot. Остальные выходы с более высокими номерами назначаются как GPIO.
DShot ESC
DShot — это цифровой протокол ESC, который обеспечивает быструю цифровую связь с высоким разрешением, которая может улучшить управление транспортным средством, что особенно полезно в приложениях с мультикоптерами и квадропланами. Другие преимущества включают
· Значения, отправляемые в ESC, защищены контрольной суммой.
· Разница в часах между ESC и автопилотом не влияет на летные характеристики.
· Калибровка ESC не требуется
DShot — это основной протокол управления ESC, используемый ESC BLHeli . Многие версии BLHeli ESC предлагают еще больше функций, таких как конфигурация ESC, телеметрия ESC , управление светодиодами и/или двунаправленный dshot . Если вы выбираете ESC с поддержкой DShot, мы рекомендуем использовать тот, который также поддерживает BLHeli32 или BLHeli_S.
Примечание
Пробуйте DShot только на ESC, которые, как известно, поддерживают его, иначе вы получите непредсказуемые результаты.
Примечание
В последнее время растет число проприетарных и непатентованных 16/32-битных ESC с прошивкой, которая поддерживает DShot и другие цифровые протоколы ESC, но не поддерживает специфические функции BLHeli32, такие как транзит и телеметрия. Подробную информацию о поддерживаемых функциях см. в руководстве к вашему ESC.
Примечание
большинство ESC DShot обычно также работают как обычные PWM ESC .
Подключение ESC
Для автопилотов с IOMCU (например, Pixhawk, CubeOrange) ESC DShot должны быть подключены к выходам AUX. На CubeOrange AUX1 нельзя использовать для DShot, то есть можно использовать только AUX2–AUX6 ( см. проблему ).
Для Pixracer и других плат без отдельного сопроцессора IOMCU можно использовать любые выходы сервопривода/двигателя.
Подробнее об ограничениях см. в разделе « Смешивание протоколов ESC » ниже.






