

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре...
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Интересное:
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Дисциплины:
|
из
5.00
|
Заказать работу |
ESC и моторы
ArduPilot поддерживает широкий спектр регуляторов скорости и моторов. На страницах ниже приведены инструкции по установке для наиболее популярных типов
· Коллекторные двигатели
· Бустерный двигатель
· Регуляторы скорости CurrawongVelocity
· DroneCAN ESC
· Регуляторы FETtecOneWire
· ШИМ, OneShot и OneShot125 ESC
· DShot ESC
· Регуляторы BLHeli32 и BLHeli_S
· Использование в качестве монитора батареи
· Двунаправленный DShot
· ДВС (двигатели внутреннего сгорания)
· KDE CAN ESC
· Toshiba CAN ESC
Коллекторные двигатели
ArduPilot поддерживает несколько методов управления коллекторными двигателями.
· ESC с щеточным двигателем, которые поддерживают вход RC PWM (сигналы PWM шириной от 1 мс до 2 мс), являются самыми простыми в использовании, поскольку не требуется специальной настройки, а остальную часть этого документа можно игнорировать. Большинство регуляторов радиоуправляемых машин для хобби относятся к этому типу.
· «Коллекторные» двигатели допускают рабочий цикл для управления скоростью, но вращаются только в одном направлении.
Проверенные водители двигателей
· Драйвер двигателя SabertoothDual 32A поддерживает «Нормальный», когда Sabertooth находится в режиме RC.
· Драйвер двигателя высокой мощности Pololu G2 поддерживает «BrushedWithRelay»
· Драйвер двигателя Pololu DRV8838 поддерживает «BrushedWithRelay»
· Контроллер двигателя RoboClaw 2x7A поддерживает «Нормальный режим», когда Roboclaw находится в режиме RC.
· ДроныSkyRocket используют «щеточные» двигатели
Подключение и конфигурация
· Подключите драйверы двигателей/ESC к выходным контактам автопилота так же, как и для обычных бесколлекторных ESC, но обратите внимание на предупреждение внизу о смешивании щеточных выходов с сервоприводами.
· Установите MOT_PWM_TYPE = 3 для «Brushed» и перезагрузите автопилот.
· Установите RC_SPEED = 16000, чтобы установить частоту обновления 16k (возможны другие значения от 1000 до 20000)
Предупреждение
Если автопилот также будет управлять сервоприводами (которые используют обычный RC PWM), позаботьтесь о том, чтобы сервоприводы не находились в той же «группе выходов PWM», что и любые выходы двигателей. Группировка задокументирована только на некоторых страницах аппаратных опций автопилота, но для обычного автопилота Pixhawk или Cube ГЛАВНЫЕ ВЫХОДЫ 1 ~ 4 находятся в группе 1, что означает, что если какие-либо щеточные двигатели настроены для ГЛАВНЫХ ВЫХОДОВ 1–4, то сервоприводы должны быть подключены к выходу. 5 или выше
Предупреждение
В настоящее время ArduPilot не поддерживает одновременное управление щеточными и бесщеточными двигателями .
Бустерный двигатель
Коптер 3.6 (и выше) и QuadPlanes поддерживают дополнительные двигатели, размещенные в середине рамы для обеспечения дополнительной подъемной силы. Эта функция совместима с любым типом кадра мультикоптера (т. е. четырехъядерный, трехгранный, шестигранный, восьмиугольный, додекагексатический). На видео выше показано, как эта функция используется вместе с двигателем внутреннего сгорания, но эту функцию также можно использовать с электродвигателями.
Примечание
Коптер пока не поддерживает двигатели, направленные горизонтально, чтобы обеспечить движение без наклона транспортного средства ( запрос на улучшение находится здесь ) .
Конфигурация
· Подключите ESC бустерного двигателя к одному из выходных портов RC автопилота (например, MAIN OUT 1 ~ 8 или AUX OUT 1 ~ 6).
· Установите SERVOx_FUNCTION = 81 для «BoostThrottle» (где «x» — номер выхода сервопривода)
· При необходимости установите для MOT_BOOST_SCALE значение от 0 до 5, чтобы масштабировать выходную мощность бустера на основе среднего выходного дросселя, отправляемого на стандартные двигатели. Чем выше коэффициент масштабирования, тем больше нагрузка на бустерный двигатель. 1 установит BoostThrottle равным основному дросселю. Выход на главный двигатель всегда будет между значениями SERVOx_MINи SERVOx_MAX(где «x» — номер выхода сервопривода)
CurrawongVelocity CAN ESC

Серия регуляторов скорости Currawong Velocity обеспечивает управление двигателем для аэрокосмического сектора с высокой степенью надежности.
Разработанный для привода очень больших двигателей для тяжелых грузов, диапазон скоростей ESC доступен с уровнями мощности выше 20 кВт.
· Аккумуляторы до 18S (75 В)
· Устойчивые токи свыше 300А
· Компактная конструкция
· Полностью изолированный коммуникационный интерфейс
· Разработано и произведено в Австралии
Velocity ESC предоставляет интерфейс связи CAN для команд и телеметрии. Также поддерживается традиционный цифровой ШИМ-интерфейс. Их можно получить с прошивкой протокола PiccoloCAN или DroneCAN.
Кроме того, Velocity ESC обеспечивает дополнительную аппаратную блокировку для повышения безопасности оператора.
Где купить
Свяжитесь с CurrawongEngineering для получения подробной информации о покупке.
Подключение и конфигурация
Примечание
В Velocity ESC используется протокол PiccoloCAN. Первоначально разработанный для автопилота Piccolo, протокол теперь изначально поддерживается ArduPilot.
Чтобы включить связь с регуляторами скорости через PiccoloCAN, необходимо установить следующие параметры.
· Установите CAN_D1_PROTOCOL = 4 (PiccoloCAN) или = «1» (DroneCAN)
· Установите CAN_P1_DRIVER = 1 (Первый драйвер), чтобы указать, что ESC подключены к порту CAN1.
· Установите MOT_PWM_MIN = 1000 и MOT_PWM_MAX = 2000, чтобы ArduPilot использовал выходной диапазон, соответствующий входному диапазону ESC.
· Установите MOT_SPIN_ARM = 0,03, что означает, что двигатели будут вращаться с 3% от полной тяги при включении.
· Установите MOT_SPIN_MIN = 0,05, что означает, что двигатели будут вращаться не менее чем на 5% от полной тяги во время полета.
Следующие расширенные параметры конфигурации позволяют регулировать работу Velocity ESC.
По умолчанию все сконфигурированные каналы двигателей используются для отправки команд управления на регуляторы скорости. Эти управляющие сообщения передаются автопилотом с частотой 50 Гц.
· Параметр CAN_D1_PC_ESC_BM — это битовая маска, определяющая, какие каналы ESC (мотор) передаются по CAN .
· Параметр CAN_D1_PC_ESC_RT определяет частоту (Гц), с которой команды отправляются на подключенные регуляторы скорости.
Регистрация и отчетность
Регуляторы скорости обеспечивают автопилоту исчерпывающую телеметрическую информацию, которая записывается в бортовой журнал автопилота и может быть просмотрена в любом средстве просмотра журнала, совместимом с ArduPilot . Эта информация включает:
· об/мин
· Напряжение
· Температура регулятора скорости
· Ток двигателя
· Температура двигателя (при использовании внешнего датчика)
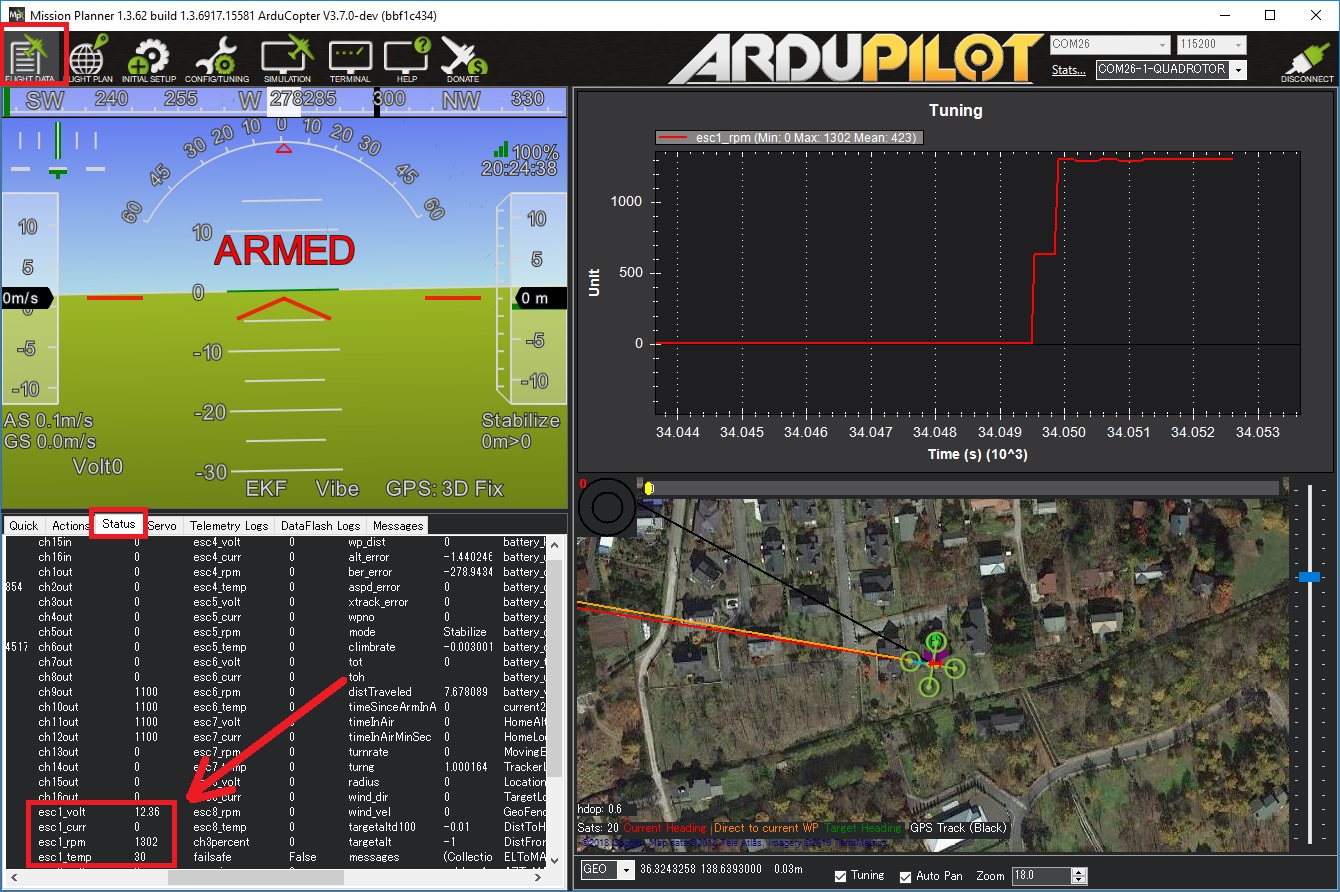
Эту информацию (кроме температуры двигателя) также можно просмотреть в режиме реального времени с помощью наземной станции. Если вы используете планировщик миссий, перейдите на вкладку статуса экрана FlightData и найдите (например) esc1_rpm.
Примечание
Для отправки данных ESC в GCS требуется использование MAVLink2. Убедитесь, что соответствующий параметр SERIALx_PROTOCOL равен 2 (где «x» — это номер последовательного порта, используемый для подключения телеметрии).
DroneCAN ESC
Вертолет, самолет и вездеход поддерживают электронные контроллеры скорости (ESC) DroneCAN , которые обеспечивают двустороннюю связь с автопилотом, что потенциально упрощает настройку и мониторинг в полете ESC и состояния двигателя.
Список CAN ESC
|
Имя |
Доступно |
Когда-либо работал | |
| Зубакс Орел 20 | Да | Да | |
| ЗубаксМикса | Да | Да | |
| ЗубаксМитохондрик | Да | Да | |
| Холибро Котлета20 | Да | Да | |
| Автоквадрат ESC32 | Нет | Нет | |
| ВЕСК | Да | Нет ( предложение ) | |
| HiEnd может автобус ESC | Да | ? | |
| Регулятор скорости | Да | Да | |
Настройка автопилота
Есть два параметра, которые определяют, какие каналы серво/двигателя автопилота отправляются на CAN escs: В приведенных ниже примерах значения показаны для драйвера CAN №1.
· CAN_D1_UC_NODE — это идентификатор узла автопилота, отправляющего команды на ESC, чтобы можно было различать несколько источников на шине CAN.
· CAN_D1_UC_ESC_BM — битовая маска, определяющая, какие выходные сигналы сервопривода/мотора автопилота отправляются на регуляторы DroneCAN.
Настройка ESC с помощью CLI
Каждый ESC должен пройти однократную ручную настройку с использованием кабеля FTDI , чтобы определить свой идентификатор узла DroneCAN и номер двигателя. В будущих версиях ArduPilot это будет заменено процедурой настройки с использованием планировщика миссий (и других GCS).
Необходимые шаги:
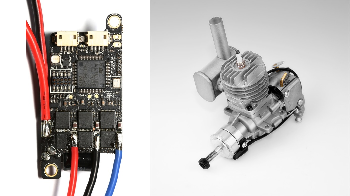
· Подключите кабель FTDI к «порту разработчика» ESC, как показано на изображении выше.
· Питание ESC от аккумулятора
· Используйте терминальную программу, такую как Putty , для подключения к ESC с помощью COM-порта кабеля FTDI, используя последовательный порт на скорости 115200 бод.
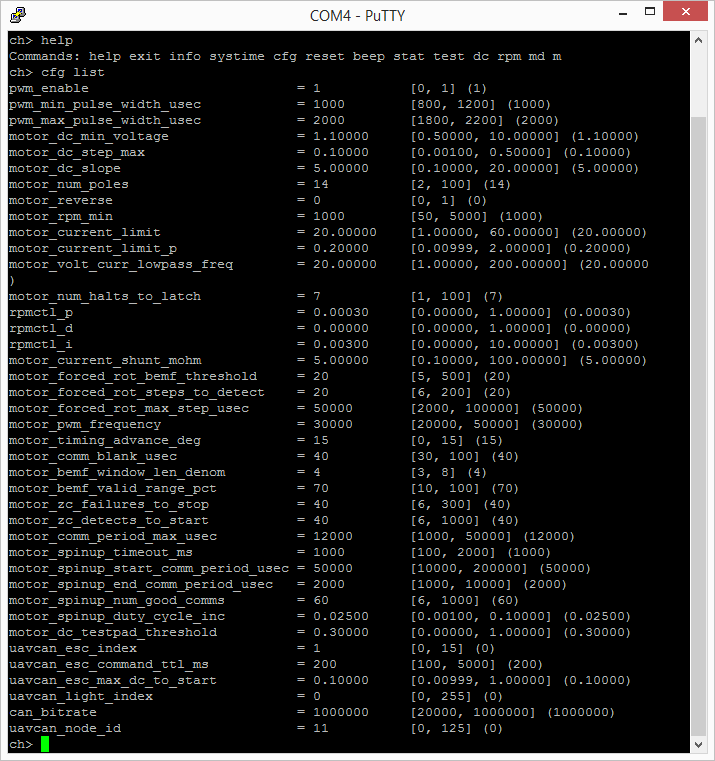
· нажмите Enter в терминале, и должно появиться приглашение «ch>».
· введите , чтобы увидеть полный список параметровcfg list
· на двигателе №1 (т.е. передний правый на квадроцикле) установите uavcan_node_id на «10» и esc_index на «0», набрав:
o cfg set uavcan_node_id 10
o cfg set esc_index 0
o cfg save (для сохранения конфигурации)
o reboot
для проверки движения двигателя:
o dc arm (чтобы включить вывод)
o dc 0.2(раскрутить мотор на 20%)
o dc(для остановки мотора)
повторите для двигателей № 2 (задний левый на квадроцикле), № 3, № 4 и т. д., при этом каждый двигатель имеет идентификатор узла и индекс на единицу выше, чем у предыдущего (на самом деле идентификатор узла не имеет значения, если он уникальный).
Регистрация и отчетность
ESC DroneCAN возвращают автопилоту информацию, которая записывается в сообщениях CESC бортового журнала автопилота и может быть просмотрена в любом средстве просмотра журнала, совместимом с ArduPilot . Эта информация включает:
· Количество ошибок
· Напряжение
· Текущий
· Температура
· об/мин
· Мощность (в процентах)
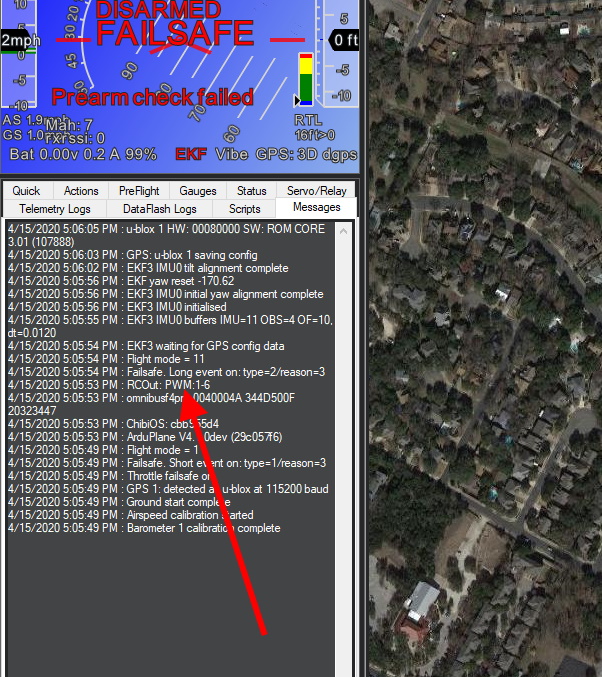
Сообщения RCOU также записываются во бортовые журналы, в которых содержится запрошенный уровень выходного сигнала, отправленный на ESC, выраженный числом от 1000 (что означает остановку) до 2000 (что означает полный выходной сигнал).
Дополнительная информация
Вики-страница ZubaxSapog , справочное руководство Sapog и прошивка ESC .
Регуляторы FETtecOneWire
Примечание
Эта функция доступна в версиях прошивки 4.1.1 и выше.

OneWire — это протокол двунаправленной связи ESC от FETtec.
Телеметрическая информация FETtecOneWire ESC отправляется обратно на автопилот:
· Число оборотов двигателя в минуту (об/мин)
· Входное напряжение (В)
· Текущая ничья (А)
· Потребляемая мощность (Вт)
· Температура (°С)
· Суммированные ошибки CRC
Автопилот использует его для:
· записывать статус каждого ESC на SDCard или во внутреннюю флэш-память для анализа после полета
· отправлять статус каждого ESC на наземную станцию или компьютер-компаньон для мониторинга в реальном времени
· опционально динамически изменять центральную частоту режекторных фильтров, используемых для уменьшения шума вибрации рамы в гироскопах. См. дополнительную информацию о конфигурации ниже.
· опционально измеряйте напряжение батареи и потребляемую мощность. См. дополнительную информацию о конфигурации ниже.
Где купить
Несколько ESC с поддержкой OneWire также доступны на FETtec.
Подключение
Протокол поддерживает до 24 ESC, но реализация драйвера устройства ArduPilot в настоящее время ограничивает это число до 12. Подключите TLMвыход телеметрии от ESC к последовательному порту RXвашего полетного контроллера. Сигнальные контакты S1, S2, S3, S4от ESC используются для получения команд от полетного контроллера, поэтому последовательный порт TXот полетного контроллера должен быть подключен к каждому сигнальному входу параллельно. На CubeOrange порт GPS2 был успешно протестирован, и рекомендуется использовать этот последовательный порт.
Настройка
ПО FETtec ESC конфигуратор
Конфигуратор FETtec ESC может изменять все настройки ESC и обновлять прошивку ESC. Используйте его, чтобы убедиться, что ваша версия прошивки ESC 2.17 (сентябрь 2021 г.) или более поздняя. Как правило, полетный контроллер FETtec можно использовать в качестве моста USB <->OneWire, чтобы конфигуратор FETtec ESC мог обмениваться данными с регуляторами. Изменения параметров ESC и обновления прошивки ESC также выполняются через OneWire, поэтому возможна последовательная передача. Например, часто используемые параметры:
· Направление двигателя - если ваш двигатель вращается в неправильном направлении, вы можете легко изменить его без повторной проводки.
· Сигналы мотора — включает или отключает звуковой сигнал мотора.
· Мягкий тормоз — если у вас есть пропеллеры, которые «отвинчиваются», если их остановить слишком быстро, вы можете использовать опцию мягкого торможения.
· Идентификаторы ESC - идентификаторы каждого ESC. Они должны начинаться с 1, быть уникальными и непрерывными.
ID внутри ESC
Каждый ESC имеет свой собственный идентификатор, который можно настроить с помощью описанного выше инструмента настройки FETtec ESC. Эти идентификаторы должны начинаться с идентификатора 1 и увеличиваться без пробела (находиться в одном непрерывном блоке). Повторяющиеся идентификаторы недействительны. Если необходимо подключить два или более ESC 4-в-1, идентификаторы второго и третьего ESC должны быть изменены перед их подключением, иначе у вас будут дублированные идентификаторы.
Функцию сервопривода можно настроить, как описано ниже.
Следующие параметры необходимо изменить в MissionPlanner в разделе CONFIG -> Полный список параметров или с помощью другого программного обеспечения наземной станции управления с поддержкой Mavlink.
Тип выхода
Этот цифровой протокол может использовать весь диапазон от 1000 до 2000. Также установите эти параметры:
· МОТ_ШИМ_МАКС = 2000
· МОТ_ШИМ_МИН = 1000
Функции для вывода
Измените параметры SERVOx_FUNCTION в соответствии с количеством двигателей и их порядком. например для квадрокоптера:
· СЕРВО1_ФУНКЦИЯ = 33
· СЕРВО2_ФУНКЦИЯ = 34
· СЕРВО3_ФУНКЦИЯ = 35
· СЕРВО4_ФУНКЦИЯ = 36
Маска ФТВ
Параметр SERVO_FTW_MASK выбирает, какие сервовыходы, если таковые имеются, будут направляться на регуляторы FETtec. После изменения этого параметра необходимо перезагрузиться. Только от SERVO1_FUNCTION до SERVO12_FUNCTION можно маршрутизировать с помощью SERVO_FTW_MASK . Вам не нужно менять идентификаторы FETtec внутри ESC, если вы меняете назначения сервовыходов внутри ArduPilot с помощью параметра SERVO_FTW_MASK .
После этого вы должны установить выходные каналы сервопривода, которые вы хотите использовать, в параметре SERVO_FTW_MASK и снова перезапустить автопилот. Например, квадрокоптеру, использующему первые четыре двигателя, потребуются первые четыре бита набора битовой маски:
СЕРВО_FTW_MASK = 15
Каждый бит маски описывает, подключен ли двигатель и должен ли использоваться с oneWire. Значение настроено как десятичное и представляет собой сумму десятичного эквивалента каждого установленного бита. Бит 1 соответствует 2^1 = 1, бит 2 соответствует 2^2 = 2,… . Например, если вы подключили мотор 1,2,3,4, маска будет 1+2+4+8 = 15.
Просто просуммируйте десятичные значения для подключенных двигателей или прочитайте их из списка ниже.
| Количество двигателей | Маска |
| 1 | 1 |
| 2 | 3 |
| 3 | 7 |
| 4 | 15 |
| 5 | 31 |
| 6 | 63 |
| 7 | 127 |
| 8 | 255 |
| 9 | 511 |
| 10 | 1023 |
| 11 | 2047 |
| 12 | 4095 |
Дополнительные особенности
Дополнительные функции можно настроить с помощью инструкций на соответствующих вики-страницах:
· динамически изменять центральную частоту узкополосных режекторных фильтров, используемых для уменьшения шума вибрации рамы в гироскопах
· измерять напряжение батареи, ток и потребляемую мощность
Моделирование SITL
ESC можно смоделировать в SITL, добавив --uartF=sim:fetteconewireescв командную строку SITL и установив следующие дополнительные параметры:
· SERIAL5_ПРОТОКОЛ = 38
· SIM_FTOWESC_ENA= 1
Это предполагает, что вы используете SERIAL5 для моделирования. Если вы хотите использовать другой, вам нужно настроить как аргумент командной строки SITL, так и параметр SERIAL*_PROTOCOL .
Поиск проблемы
· ESC продолжают инициализироваться
Если система управления полетом не получает телеметрические сигналы от каждого ESC и не находится под охраной, она повторно инициализирует ESC до тех пор, пока каждый ESC не будет настроен правильно. Маска FTW используется для определения числа двигателей, которое необходимо найти. Дважды проверьте, правильно ли рассчитана SERVO_FTW_MASK , чтобы соответствовать фактическому количеству двигателей.
· ESC не инициализируются.
Проверьте правильность параметров. Также убедитесь, что контакт телеметрии подключен, так как без него он работать не будет.
· ESC не найдены в конфигураторе FETtec.
Для использования с конфигуратором FETtec требуется полудуплексное последовательное соединение со скоростью 2 Мбод/с, которое в настоящее время не поддерживается ArduPilot. Вам необходимо использовать внешнее последовательное устройство, такое как FETtec FC или последовательный USB-адаптер. Пожалуйста, отключите ArduPilot FC от ESC, чтобы найти его в конфигураторе FETtec.
Предупреждение
Убедитесь, что ваш ESC поддерживает выбранную вами конфигурацию. В противном случае может произойти повреждение. Это включает частоту кадров, обсуждаемую ниже. Также будьте осторожны при переключении между протоколами без перезагрузки или повторной калибровки ESC, так как это может привести к неуправляемому выходу двигателя.
ШИМ
Это наиболее распространенные ESC для некоптерных приложений, и исторически они были первыми бесколлекторными ESC.

PWM ESC используют периодический входной импульс шириной обычно от 1000 мкс до 2000 мкс для нулевой и полной мощности соответственно.
· Установите для MOT_PWM_TYPE значение 0/Нормальный (по умолчанию) и перезагрузите автопилот.
· MOT_PWM_MIN и MOT_PWM_MAX определяют диапазон ШИМ, отправляемый на двигатели (например, где SERVOx_FUNCTION = «Motor1», «Motor2» и т. д.). См. Калибровка ESC для получения информации о согласовании выходного диапазона автопилота с входным диапазоном ESC.
Частота кадров этих импульсов обычно составляет от 50 Гц до 490 Гц. Более высокая частота кадров позволяет быстрее отправлять управляющие реакции на двигатель, если ESC поддерживает такую частоту кадров.
· Установите RC_SPEED , чтобы изменить частоту кадров (по умолчанию 490 Гц).
Примечание
убедитесь в возможностях вашего ESC, прежде чем выбирать более высокую частоту кадров, чтобы избежать повреждения ESC.
Один выстрел
OneShot (не путать с «OneShot125») — это более старый протокол, который использует ту же ширину импульса, что и обычный ШИМ, но имеет фиксированную частоту кадров, равную скорости основного цикла автопилота. Преимуществ использования этого протокола по сравнению с обычным ШИМ немного.
· Установите для MOT_PWM_TYPE значение 1 (OneShot) и перезагрузите автопилот.
Ваншот 125
Протокол OneShot125 (иногда ошибочно сокращаемый до OneShot) похож на обычный PWM, за исключением того, что ширина импульса делится на коэффициент 8, что обеспечивает более быструю связь от автопилота к ESC. Отдельные импульсы отправляются быстрее, а общую частоту кадров можно увеличить до 490 Гц.
· Установите для MOT_PWM_TYPE значение 2 (OneShot125) и перезагрузите автопилот.
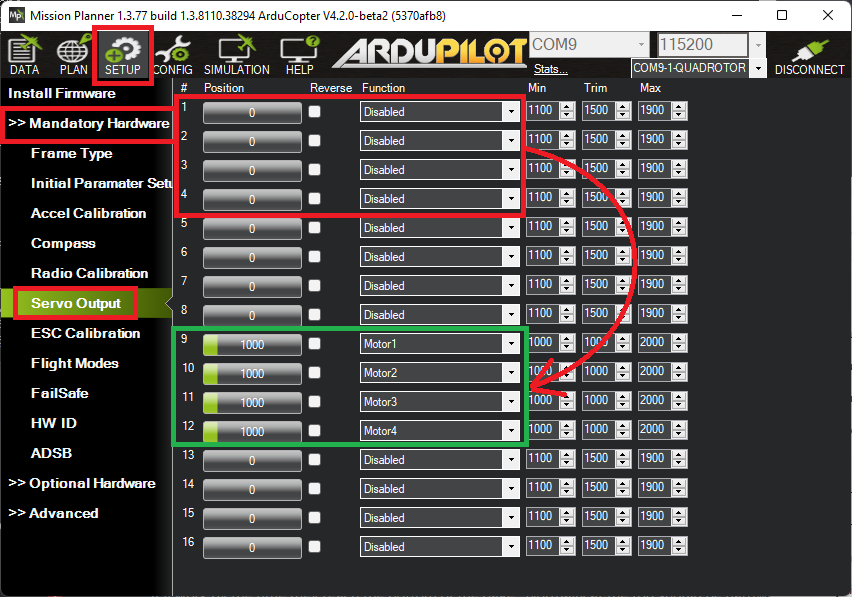
При использовании автопилота с IOMCU (например, Pixhawk, CubeOrange) ESC должны быть подключены к выходам AUX, а соответствующие значения SERVOx_FUNCTION должны быть установлены на «Motor1» и т. д. Это проще всего сделать с помощью «ServoOutput» Планировщика миссий. страница
Перезагрузите автопилот и проверьте «баннер RC», чтобы убедиться, что выходные каналы настроены должным образом (этот баннер появляется всякий раз, когда загружаются параметры).

Смешивание протоколов ESC
В то время как все серво/моторные выходы автопилота ArduPilot способны работать в обычном ШИМ с частотой кадров 50 Гц, не все из них поддерживают другие протоколы ESC. И, как правило, эти конфигурации должны применяться к предварительно назначенным группам выходов, даже если они не все управляют ESC. Таким образом, применяются следующие предостережения:
1. 8 «ГЛАВНЫХ» выходов автопилотов, использующих IOMCU (таких как PixHawk и Cube), нельзя использовать для протоколов, отличных от Normal PWM и OneShot. На этих автопилотах только дополнительные выходы «AUX» могут должным образом поддерживать OneShot125. Если вы попытаетесь установить для «ГЛАВНОГО» выхода значение OneShot125, произойдет обычный выход ШИМ, даже если он был настроен на протокол OneShot125.
2. Для Pixracer и других плат без отдельного сопроцессора IOMCU можно использовать все выходы сервопривода/двигателя.
3. Группы выходов с общим таймером ДОЛЖНЫ иметь одинаковую расширенную конфигурацию. Обычно они указаны в описании аппаратного обеспечения автопилота, ссылка на которое приведена на странице « Параметры аппаратного обеспечения автопилота ». Например, если выход сконфигурирован для OneShot125 в группе, то вы не можете использовать другой выход в этой группе для нормальной работы PWM ESC или нормальной работы сервопривода PWM.
Примечание
Каждый раз, когда автопилот инициализируется, он отправляет «RC Banner» на наземную станцию управления, показывая, какие выходы являются PWM, OneShot, OneShot125 или DShot. Остальные выходы с более высокими номерами назначаются как GPIO.
DShot ESC
DShot — это цифровой протокол ESC, который обеспечивает быструю цифровую связь с высоким разрешением, которая может улучшить управление транспортным средством, что особенно полезно в приложениях с мультикоптерами и квадропланами. Другие преимущества включают
· Значения, отправляемые в ESC, защищены контрольной суммой.
· Разница в часах между ESC и автопилотом не влияет на летные характеристики.
· Калибровка ESC не требуется
DShot — это основной протокол управления ESC, используемый ESC BLHeli . Многие версии BLHeli ESC предлагают еще больше функций, таких как конфигурация ESC, телеметрия ESC , управление светодиодами и/или двунаправленный dshot . Если вы выбираете ESC с поддержкой DShot, мы рекомендуем использовать тот, который также поддерживает BLHeli32 или BLHeli_S.
Примечание
Пробуйте DShot только на ESC, которые, как известно, поддерживают его, иначе вы получите непредсказуемые результаты.
Примечание
В последнее время растет число проприетарных и непатентованных 16/32-битных ESC с прошивкой, которая поддерживает DShot и другие цифровые протоколы ESC, но не поддерживает специфические функции BLHeli32, такие как транзит и телеметрия. Подробную информацию о поддерживаемых функциях см. в руководстве к вашему ESC.
Примечание
большинство ESC DShot обычно также работают как обычные PWM ESC .
Подключение ESC
Для автопилотов с IOMCU (например, Pixhawk, CubeOrange) ESC DShot должны быть подключены к выходам AUX. На CubeOrange AUX1 нельзя использовать для DShot, то есть можно использовать только AUX2–AUX6 ( см. проблему ).
Для Pixracer и других плат без отдельного сопроцессора IOMCU можно использовать любые выходы сервопривода/двигателя.
Подробнее об ограничениях см. в разделе « Смешивание протоколов ESC » ниже.
Примечание
Когда выход сконфигурирован для DShot, SERVOx_MIN/MAX/TRIMпараметры этого выхода всегда будут игнорироваться, так как DShot не использует эти параметры. Используемое значение обрезки будет 1500, если это обратимый выход, или 1000, если нормальная настройка вывода в DShot, а диапазон вывода всегда будет 1000-2000. Шаг калибровки ESC не требуется.
Примечание
Всю конфигурацию на основе маски можно изменить только на уровне группы ШИМ, пожалуйста, обратитесь к документации вашего полетного контроллера, чтобы узнать, какие выходы относятся к разным группам. См . раздел «Смешивание протоколов ESC » ниже.
Предупреждение
Убедитесь, что ваш ESC поддерживает выбранную вами конфигурацию. В противном случае может произойти повреждение. Это включает частоту кадров, обсуждаемую ниже. Также будьте осторожны при переключении между цифровым и аналоговым выходом без повторной калибровки ESC, так как это может привести к неуправляемому выходу двигателя.
Проверьте баннер RC
Перезагрузите автопилот и проверьте «баннер RC», чтобы убедиться, что выходные каналы настроены должным образом (этот баннер появляется всякий раз, когда загружаются параметры).

Дополнительная конфигурация
Частота обновления DShot
Частоту, с которой отправляются импульсы DShot, можно настроить с помощью SERVO_DSHOT_RATE . По умолчанию ArduPilot будет выводить импульс данных DShot каждый раз, когда будет готов новый образец IMU, и с фиксированным интервалом 1 кГц. На коптере со стандартной частотой цикла планировщика 400 Гц это работает на частоте около 1,4 кГц. Однако вывод довольно нерегулярный - чтобы получить более регулярный вывод SERVO_DSHOT_RATEможно настроить для отправки импульсов со скоростью, кратной циклической частоте планировщика. Таким образом, если установлено значение 2, импульсы будут отправляться с частотой 800 Гц, значение 3 — с частотой 1,2 кГц и так далее. Разница заключается в очень, очень равномерной мощности, которая может принести пользу коптерам, нуждающимся в более жестком управлении двигателем (например, небольшим гонщикам). Не рекомендуется отправлять импульсы с частотой менее 1 кГц из-за сообщений о том, что BLHeli32 иногда пропускает кадры на некоторых полетных контроллерах, аналогичным образом отправка с более высокой частотой может привести к повышению надежности и более быстрому восстановлению после пропущенных импульсов, где это необходимо, за счет некоторого процессорного времени. Очень высокие частоты можно использовать только для более высоких скоростей DShot, поскольку в противном случае импульсы могут перекрываться — например, максимальная скорость, которую теоретически может поддерживать DShot150, составляет 4 кГц.
Команды DShot
На некоторых регуляторах поддерживаются команды DShot. Они позволяют полетному контроллеру управлять такими функциями, как светодиоды ESC, звуковые сигналы и направление вращения двигателя. Чтобы использовать команды DShot:
· установить SERVO_DSHOT_ESC = 1 (BLHeli32/BLHeli_S/Kiss)
· установите флажок « DShot » NTF_LED_TYPES, чтобы включить управление светодиодами ESC
· установите флажок « DShot » NTF_BUZZ_TYPES, чтобы включить использование двигателей в качестве зуммеров
Текущие поддерживаемые команды:
· Светодиоды DShot вкл./выкл.
· Звуковой сигнал DShot вкл./выкл.
· Изменить направление вращения двигателя (см . параметр SERVO_BLH_RVMASK )
· Реверсивный DShot (также известный как 3D-режим) (см. Реверсивный ESC DShot )
Предупреждение
В настоящее время ArduPilot поддерживает набор команд ( SERVO_DSHOT_ESC = 1), который обычно используется, однако появляются другие, которые могут быть несовместимы, что приводит к неопределенной операции. Соблюдайте осторожность (удалите лопасти!) до тех пор, пока не будет проверена правильная работа с использованием type=1 для вашего ESC.
Смешивание протоколов ESC
В то время как все выходы сервопривода/мотора автопилота ArduPilot способны работать в обычном режиме ШИМ с частотой кадров 50 Гц и выше, не все из них поддерживают другие конфигурации протокола ESC. И, как правило, эти конфигурации должны применяться к предварительно назначенным группам выходов, даже если они не все управляют ESC. Таким образом, применяются следующие предостережения:
1. 8 «ГЛАВНЫХ» выходов автопилотов, использующих IOMCU (например, PixHawk и Cube), нельзя использовать для DShot. На этих автопилотах только дополнительные выходы «AUX» поддерживают DShot. Если вы попытаетесь установить «ГЛАВНЫЙ» выход на DShot, произойдет обычный выход PWM, даже если он был настроен на протокол DShot.
2. Для Pixracer и других плат без отдельного сопроцессора IOMCU можно использовать все выходы сервопривода/двигателя.
3. Группы выходов с общим таймером ДОЛЖНЫ иметь одинаковую расширенную конфигурацию. Обычно они указаны в описании аппаратного обеспечения автопилота, ссылка на которое приведена на странице « Параметры аппаратного обеспечения автопилота ». Например, если выход сконфигурирован для DShot в группе, то вы не можете использовать другой выход в этой группе для нормального PWM ESC или нормальной работы сервопривода PWM.
Примечание
Каждый раз, когда автопилот инициализируется, он отправляет сообщение на наземную станцию управления, показывая, какие выходы являются PWM/Oneshot/или DShot. Остальные выходы с более высокими номерами назначаются как GPIO.
Что купить
· Газовый двигатель и модуль зажигания
· RC-переключатель для управления питанием модуля зажигания, как этот, с сайта milehighrc.com.
· Опционально электрический стартер, подобный этому, от milehighrc.com.
Подключение и конфигурация
Выключатель зажигания двигателя и (дополнительно) стартер должны быть подключены к выходам сервопривода автопилота Ignitionи Starter(см. раздел «ДВС» в разделе « Функции выходов автопилота » ).
Чтобы позволить пилоту напрямую управлять зажиганием и (опционально) стартером с передатчика, необходимо настроить проход RC:
· Установите SERVOx_FUNCTION(где «x» — выходной канал автопилота, подключенный к зажиганию или стартеру) на RCINy(где «y» — канал передатчика). Например, установите SERVO8_FUNCTION = 59/”RCIN9”, чтобы разрешить каналу 9 передатчика управлять выходом 8 автопилота.
Обязательно проверьте поведение двигателя, когда передатчик выключен, чтобы смоделировать то, что произойдет во время отказоустойчивости RC.
Примечание
Двигатель можно запускать и останавливать в автономных миссиях с помощью команды DO_ENGINE_CONTROLMission. Это полезно перед NAV_VTOL_TAKEOFF или NAV_VTOL_LAND для запуска или остановки двигателя, чтобы предотвратить удары винта при посадке на ветру с винтом с малым зазором. См . раздел Команды миссии .
Виброизоляция
Высокая вибрация от двигателей внутреннего сгорания означает, что гашение вибрации имеет решающее значение. Часто необходимо установить автопилот на пластину с добавлением самоклеящихся свинцовых грузов для увеличения его массы.
KDE CAN ESC
KDECAN ESC — это высококлассные ESC, которые обеспечивают управление и обратную связь с использованием пользовательского протокола CAN.
Примечание
Пожалуйста, используйте Copter-4.1 (или выше), Plane-4.1 (или выше) или Rover-4.1 (или выше) с этими ESC, потому что, хотя более ранние версии ArduPilot их поддерживали, были проблемы с диапазоном и порядком двигателей, которые делали настройку трудный.
Где купить
· KDE-UAS125UVC-HE и KDE-UAS85UVC можно приобрести на сайте KDEDirect.com (другие ESC KDE также могут поддерживать CAN, проверьте изображения ESC, те, у которых сбоку написано «CAN», должны работать).
· Также требуется комплект проводов KDECAN.
Настройка ESC
Инструкции KDE по подключению и настройке с помощью ArduPilot находятся здесь.
· Загрузите, установите и запустите KDE DirectDeviceManager .
· Подключите первый ESC к компьютеру с помощью USB-кабеля и настройте устройство, как показано ниже.
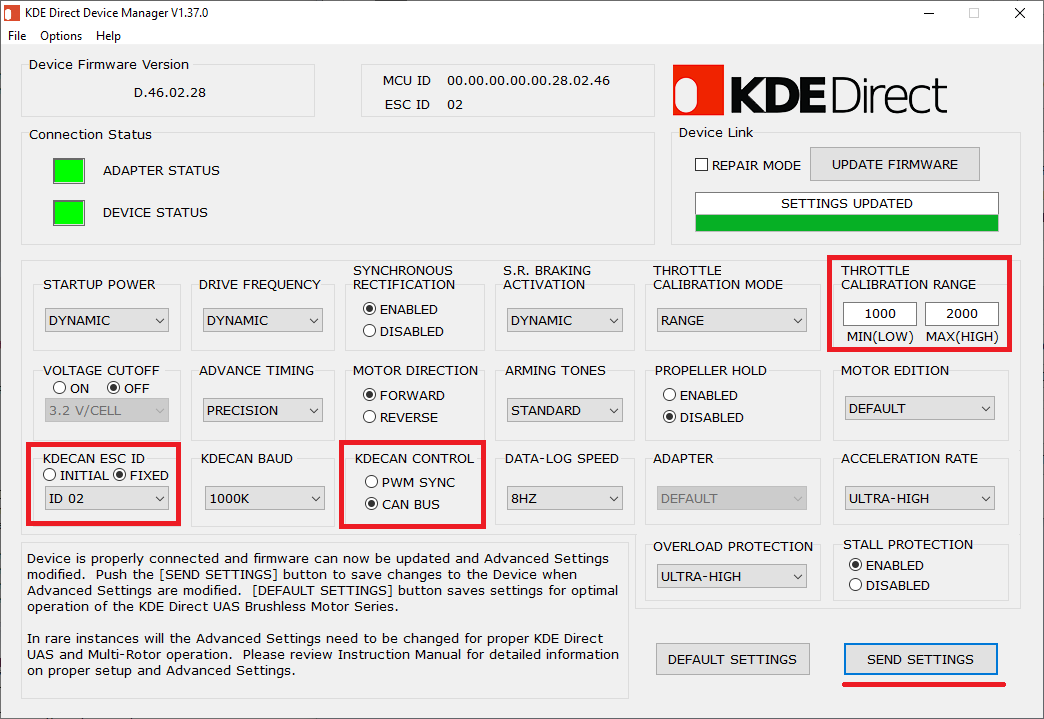
· Повторите настройку всех остальных ESC, каждый раз увеличивая «KDECAN ESC ID» на единицу. Лучше всего пометить ESC номером, который является идентификатором ESC - 1. Несколько сбивает с толку самый низкий идентификатор ESC - 02, но это будет отражать выход SERVO1 автопилота.
Подключение ESC
· В 4-контактном кабеле, соединяющем первый ESC с портом CAN1 автопилота, все контакты должны быть переставлены местами на одном конце (в идеале на том конце, который подключается к первому ESC). Pin1 (красный) следует поменять местами с Pin4. Pin2 следует поменять местами с Pin3. Этот модифицированный кабель следует использовать для подключения порта CAN1 автопилота к первому ESC.
· ESC должны быть последовательно соединены вместе с помощью комплекта проводов KDECAN. Терминатор CAN (4-контактный разъем с черной петлей) должен быть подключен к последнему ESC в цепочке.

Предупреждение
При использовании автопилота CubeBlack метки CAN1 и CAN2 меняются местами. В этих инструкциях предполагается, что ESC подключены к порту CAN1, который на автопилотах CubeBlack помечен как «CAN2».
Конфигурация
· Установите CAN_D1_PROTOCOL = 8 (KDECAN)
· Установите CAN_P1_DRIVER = 1 (Первый драйвер), чтобы указать, что ESC подключены к порту CAN1.
· Установите MOT_PWM_MIN = 1000 и MOT_PWM_MAX = 2000, чтобы ArduPilot использовал выходной диапазон, соответствующий входному диапазону ESC.
· Установите CAN_D1_KDE_NPOLE на количество полюсов двигателя (обратите внимание, что может потребоваться перезагрузка автопилота, чтобы этот параметр появился). Если вы не уверены в количестве, вы, вероятно, можете сосчитать их, внимательно посмотрев на верхнюю часть двигателя. Даже при неправильной настройке двигатели должны нормально вращаться, потому что это число используется только для расчета числа оборотов в минуту, сообщаемого наземной станции и сохраняемого в бортовых журналах.
Регистрация и отчетность
ESC KDECAN возвращают автопилоту информацию, которая записывается в сообщениях ESCn бортового журнала автопилота и может быть просмотрена в любом средстве просмотра журнала, совместимом с ArduPilot . Эта информация включает:
· об/мин
· Напряжение
· Текущий
· Температура регулятора скорости
· Общий ток
Сообщения RCOU также записываются во бортовые журналы, в которых содержится запрошенный уровень выходного сигнала, отправленный на ESC, выраженный числом от 1000 (что означает остановку) до 2000 (что означает полный выходной сигнал).
Эту информацию также можно просмотреть в режиме реального времени с помощью наземной станции. Если вы используете планировщик миссий, перейдите на вкладку статуса экрана FlightData и найдите esc1_rpm.
Примечание
Для отправки данных ESC в GCS требуется использование MAVLink2. Убедитесь, что соответствующий параметр SERIALx_PROTOCOL равен 2 (где «x» — это номер

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!