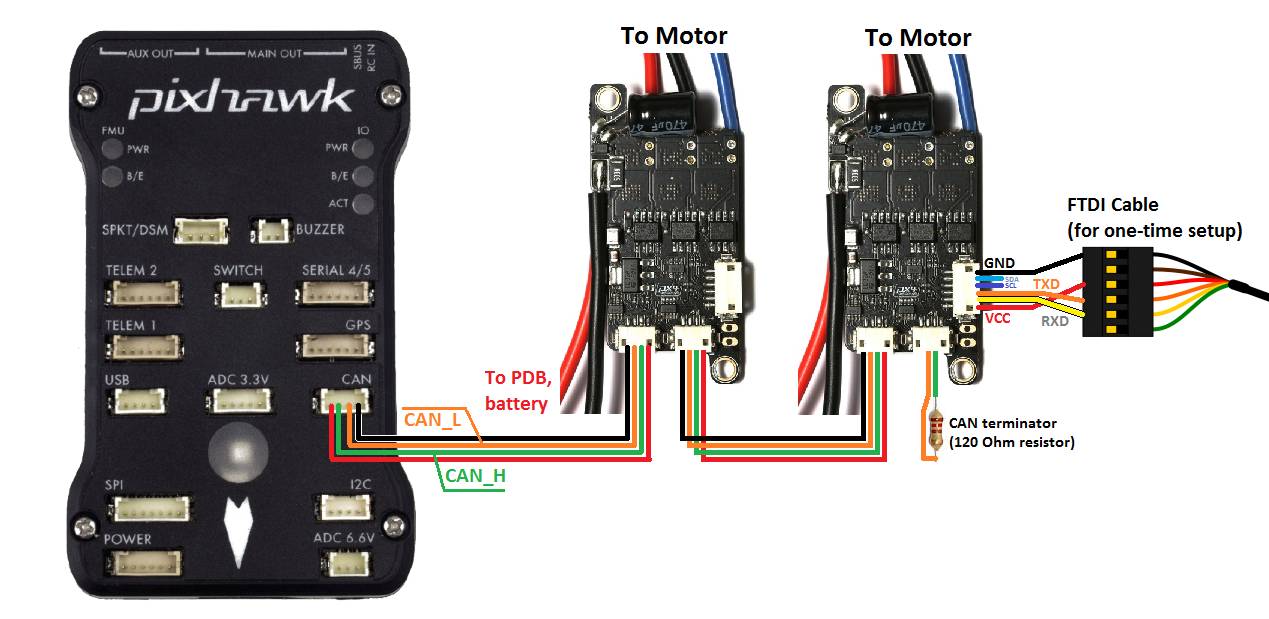
Один ESC (неважно какой) должен быть подключен к порту CAN полетного контроллера с помощью переходного кабеля 4-pin DF13 на 4-pin DroneCAN. Каждый последующий ESC должен быть подключен к предыдущему с помощью 4-контактного кабеля DroneCAN. Последний ESC должен иметь терминатор шины CAN, подключенный к одному из его 4-контактных портов DroneCAN.
Подключение кабеля FTDI требуется только для одноразовой настройки, описанной ниже.
Кроме того, ESC можно настроить через CAN-шину с помощью DroneCAN GUI Tool <common-uavcan-gui> .
Настройка автопилота
Есть два параметра, которые определяют, какие каналы серво/двигателя автопилота отправляются на CAN escs: В приведенных ниже примерах значения показаны для драйвера CAN №1.
· CAN_D1_UC_NODE — это идентификатор узла автопилота, отправляющего команды на ESC, чтобы можно было различать несколько источников на шине CAN.
· CAN_D1_UC_ESC_BM — битовая маска, определяющая, какие выходные сигналы сервопривода/мотора автопилота отправляются на регуляторы DroneCAN.
Настройка ESC с помощью CLI
Каждый ESC должен пройти однократную ручную настройку с использованием кабеля FTDI , чтобы определить свой идентификатор узла DroneCAN и номер двигателя. В будущих версиях ArduPilot это будет заменено процедурой настройки с использованием планировщика миссий (и других GCS).
Необходимые шаги:
· Подключите кабель FTDI к «порту разработчика» ESC, как показано на изображении выше.
· Питание ESC от аккумулятора
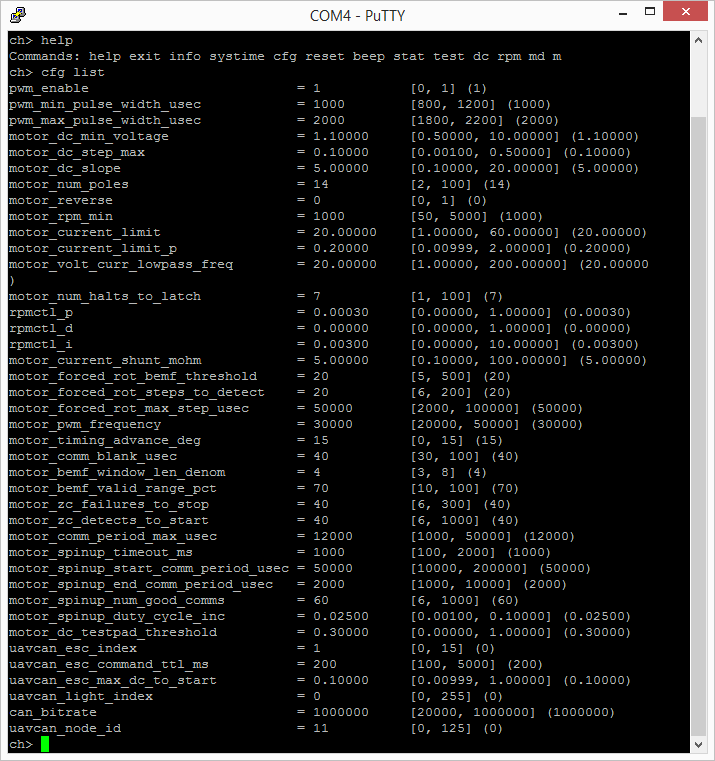
· Используйте терминальную программу, такую как Putty , для подключения к ESC с помощью COM-порта кабеля FTDI, используя последовательный порт на скорости 115200 бод.
· нажмите Enter в терминале, и должно появиться приглашение «ch>».
· введите , чтобы увидеть полный список параметровcfg list
· на двигателе №1 (т.е. передний правый на квадроцикле) установите uavcan_node_id на «10» и esc_index на «0», набрав:
o cfg set uavcan_node_id 10
o cfg set esc_index 0
o cfg save (для сохранения конфигурации)
o reboot
для проверки движения двигателя:
o dc arm (чтобы включить вывод)
o dc 0.2(раскрутить мотор на 20%)
o dc(для остановки мотора)
повторите для двигателей № 2 (задний левый на квадроцикле), № 3, № 4 и т. д., при этом каждый двигатель имеет идентификатор узла и индекс на единицу выше, чем у предыдущего (на самом деле идентификатор узла не имеет значения, если он уникальный).
Регистрация и отчетность
ESC DroneCAN возвращают автопилоту информацию, которая записывается в сообщениях CESC бортового журнала автопилота и может быть просмотрена в любом средстве просмотра журнала, совместимом с ArduPilot . Эта информация включает:
· Количество ошибок
· Напряжение
· Текущий
· Температура
· об/мин
· Мощность (в процентах)
Сообщения RCOU также записываются во бортовые журналы, в которых содержится запрошенный уровень выходного сигнала, отправленный на ESC, выраженный числом от 1000 (что означает остановку) до 2000 (что означает полный выходной сигнал).
Дополнительная информация
Вики-страница ZubaxSapog , справочное руководство Sapog и прошивка ESC .
Регуляторы FETtecOneWire
Примечание
Эта функция доступна в версиях прошивки 4.1.1 и выше.

OneWire — это протокол двунаправленной связи ESC от FETtec.
Телеметрическая информация FETtecOneWire ESC отправляется обратно на автопилот:
· Число оборотов двигателя в минуту (об/мин)
· Входное напряжение (В)
· Текущая ничья (А)
· Потребляемая мощность (Вт)
· Температура (°С)
· Суммированные ошибки CRC
Автопилот использует его для:
· записывать статус каждого ESC на SDCard или во внутреннюю флэш-память для анализа после полета
· отправлять статус каждого ESC на наземную станцию или компьютер-компаньон для мониторинга в реальном времени
· опционально динамически изменять центральную частоту режекторных фильтров, используемых для уменьшения шума вибрации рамы в гироскопах. См. дополнительную информацию о конфигурации ниже.
· опционально измеряйте напряжение батареи и потребляемую мощность. См. дополнительную информацию о конфигурации ниже.
Где купить
Несколько ESC с поддержкой OneWire также доступны на FETtec.
Подключение
Протокол поддерживает до 24 ESC, но реализация драйвера устройства ArduPilot в настоящее время ограничивает это число до 12. Подключите TLMвыход телеметрии от ESC к последовательному порту RXвашего полетного контроллера. Сигнальные контакты S1, S2, S3, S4от ESC используются для получения команд от полетного контроллера, поэтому последовательный порт TXот полетного контроллера должен быть подключен к каждому сигнальному входу параллельно. На CubeOrange порт GPS2 был успешно протестирован, и рекомендуется использовать этот последовательный порт.
Настройка
ПО FETtec ESC конфигуратор
Конфигуратор FETtec ESC может изменять все настройки ESC и обновлять прошивку ESC. Используйте его, чтобы убедиться, что ваша версия прошивки ESC 2.17 (сентябрь 2021 г.) или более поздняя. Как правило, полетный контроллер FETtec можно использовать в качестве моста USB <->OneWire, чтобы конфигуратор FETtec ESC мог обмениваться данными с регуляторами. Изменения параметров ESC и обновления прошивки ESC также выполняются через OneWire, поэтому возможна последовательная передача. Например, часто используемые параметры:
· Направление двигателя - если ваш двигатель вращается в неправильном направлении, вы можете легко изменить его без повторной проводки.
· Сигналы мотора — включает или отключает звуковой сигнал мотора.
· Мягкий тормоз — если у вас есть пропеллеры, которые «отвинчиваются», если их остановить слишком быстро, вы можете использовать опцию мягкого торможения.
· Идентификаторы ESC - идентификаторы каждого ESC. Они должны начинаться с 1, быть уникальными и непрерывными.
ID внутри ESC
Каждый ESC имеет свой собственный идентификатор, который можно настроить с помощью описанного выше инструмента настройки FETtec ESC. Эти идентификаторы должны начинаться с идентификатора 1 и увеличиваться без пробела (находиться в одном непрерывном блоке). Повторяющиеся идентификаторы недействительны. Если необходимо подключить два или более ESC 4-в-1, идентификаторы второго и третьего ESC должны быть изменены перед их подключением, иначе у вас будут дублированные идентификаторы.
Функцию сервопривода можно настроить, как описано ниже.
Следующие параметры необходимо изменить в MissionPlanner в разделе CONFIG -> Полный список параметров или с помощью другого программного обеспечения наземной станции управления с поддержкой Mavlink.






