

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
Топ:
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Интересное:
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
| Времз | I, МИН | ||
| Высота, м | |||
| Сь И Ю0 кг | 12000 кг | ||
| 3,0 | 4,5 | ||
| 6,5 | 9,7 | ||
| 10,5 | 16,7 | ||
| 15,5 | 25,4 | ||
| 22,0 | — |
Время набора высоты, полученное в результате летных испытаний вертолета Ми-8 при ранее указанных условиях, указано в табл. 5 и на рис. 58 (кривые 2).
Для вертолета Ми-8 в режиме набора высоты, горизонталь» ном полете, снижении с работающими двигателями и на режиме планирования без работающих двигателей установлен один, и тот же диапазон допустимых скоростей по траектории в зависимости от высоты полета и полетного (веса вертолета 1.
4. Особенности набора высоты с поступательной скоростью и методики его выполнения
Как было сказано ранее, установившийся набор высоты на вертолете Ми-8 осуществляется с включенными каналами автопилота тангажа, крена и направления при правом положении рукоятки корректора газа, при котором включена автоматическая система поддержания постоянных оборотов несущего винта.
На установившемся режиме набора высоты скорость постоянной автоматически не поддерживается, так как автопилот автоматически стабилизирует вертолет не по скорости, а по углу тангажа. Вертолет медленно уходит с заданной скорости, поэтому пилот должен плавным движением ручки циклического шага в продольном направлении поддерживать заданную скорость.
В установившемся режиме набора высоты без скольжения вертолет Ми-8 будет балансироваться с небольшим правым креном (при У=120 км/ч угол крена 2°) за счет действия поперечного момента втулки, или с левым скольжением (при У= = 120 км/ч угол скольжения (3 = 5°).
Угол тангажа при наборе высоты зависит от скорости набора высоты, центровки и режима работы двигателей: чем больше скорость по траектории, более передняя центровка и меньше режим работы двигателей, тем меньше угол тангажа, и наоборот.
В режиме набора высоты при скорости 120 км/ч по прибору на номинальном режиме работы двигателей и при центровке, близкой к предельно задней, угол тангажа вертолета Ми-8 со-ставляет 5,5°.
Набор высоты обычно совершается на номинальном режиме работы двигателей и на наивыгоднейшей скорости набора высоты (120 км/ч по прибору), которая не меняется от высоты полета. Вместе с тем, набор высоты можно совершить на взлетном режиме работы двигателей, а также и на режиме ниже номинального.
Если набор высоты совершается без автопилота, то положение рычагов управления в режиме набора высоты будет отличаться от их положения в режиме горизонтального полета, как
 1 Диапазон допустимых скоростей см. в следующей главе. 148
1 Диапазон допустимых скоростей см. в следующей главе. 148
и у вертолета Ми-4: правая педаль — вперед, ручка циклического шага отклонена вправо от того положения, которое они занимали в горизонтальном полете. При наборе высоты с включенным автопилотом рычаги управления могут занимать любое положение в зависимости от того, при каком их положении были сняты усилия кнопкой.
Перевод вертолета из режима набора высоты в режим горизонтального полета с включенным автопилотом не отличается от его перевода без автопилота. Автопилот лишь упрощает этот переходной режим.
Набрав заданную высоту, вертолет переводится в режим горизонтального полета, для чего, не меняя режим работы двигателей, ручкой управления следует установить нужную скорость для горизонтального полета, а затем ручкой, общего шага подобрать для этой скорости необходимый режим работы двигателей, не меняя положения рукоятки корректора газа (правое). При этом обороты несущего винта, как и в наборе высоты, будут поддерживаться автоматически в пределах 95+2%.
Как известно, у одновинтового вертолета без автопилота при переходе с режима набора высоты к горизонтальному полету, как и при любом другом переходном режиме, необходимо действовать всеми рычагами управления для балансировки вертолета в новом режиме полета. При включенном автопилоте управление и балансировка осуществляются как пилотом, так и автопилотом. При этом стрелки индикатора нулевого ИН-4 перемещаются от своего нулевого положения как от действия автопилота, так и от действия пилота. При отклонении правой педали стрелка канала направления «Н» отклоняется вправо, при отклонении ручки управления вправо стрелка канала крена «К» поворачивается против хода часовой стрелки. При отклонении ручки управления от себя стрелка канала тангажа «Т» перемещается вверх. При обратных движениях ручки управления стрелки индикатора перемещаются в направлении, обратном указанному. При установившемся режиме полета, если стрелки нулевого индикатора установилисывблизи упоров, необходимо их установить в нейтральное положение ручками центровки, затем выключить соответствующий канал автопилота, сбалансировать вертолет рычагами управления и включить опять данный канал автопилота.
Набор высоты с грузами на внешней подвеске обычно совершается на скорости 80—100 км/ч по прибору в зависимости от формы груза: чем больше габарит груза и чем более он несимметричен, тем меньше должна быть скорость полета. Необходимо подобрать такую скорость, при которой поведение груза будет наиболее спокойное. Симметричные грузы больших габаритов на скоростях более 80 км/ч создают большое сопротивление и раскачиваются, это раскачивание передается на вертолет в виде рывков. Симметричные грузы большой высоты при уве-
личении скорости начинают вращаться. Это вращение не влияет на поведение вертолета. При наличии таких грузов скорость набора может быть доведена до 120 км/ч. Набор высоты с грузами на внешней подвеске осуществляется с включенными каналами крена и тангажа автопилота. После набора заданной высоты необходимо перевести вертолет в режим горизонтального полета. Действия рычагами управления должны быть очень плавными и небольшими по величине, чтобы не вызвать большой разбалансировки вертолета и раскачки груза.
5. Летные ограничения при наборе высоты с поступательной
Скоростью
1. Потолок вертолета при нормальном полетном весе со
ставляет 4500' м, при максимальном весе 4000 м.
2. Максимально допустимые обороты турбокомпрессоров
101%.
3. Максимально допустимая несинхронность оборотов тур
бокомпрессоров без срабатывания ограничителей 2%, при сра
батывании ограничителей 3—4%.
4. Обороты несущего винта при наборе высоты на взлетном
режиме 92—93%, на номинальном режиме работы двигателей
95+2%, на переходных режимах полета 89—103% на время не
более 30 с.
Глава VI ГОРИЗОНТАЛЬНЫЙ ПОЛЕТ
ОБЩАЯ ХАРАКТЕРИСТИКА
Горизонтальный полет на вертолете Ми-8 осуществляется с правой коррекцией, при которой работает система автоматической стабилизации оборотов несущего винта. Управление шагом винта и мощностью двигателей производится только ручкой общего шага.
Как правило, установившийся режим горизонтального полета осуществляется включением овсех каналов автопилота. При этом происходит автоматическая стабилизация вертолета по направлению, крену, тангажу и высоте полета.
Канал высоты служит для поддержания заданной барометрической высоты установившегося горизонтального полета. Особенность канала высоты, как и канала направления, состоит в том, что он работает только в режиме согласования и стабилизации. В режиме управления при нажатии на кнопку фрикциона ручки общего шага канал высоты автоматически отключается и переводится на режим согласования. Рычаг «шаг — газ» освобождается для управления пилотом. Канал высоты также можно отключить кнопкой отключения на пульте автопилота. Включается канал высоты только после балансировки вертолета в горизонтальном полете на высоте не ниже 50 м нажатием кнопки включения высоты на пульте управления автопилота.
Контроль работы канала высоты производится по индикатору нулевому и по указателю общего шага. Нормальная работа канала характеризуется выдерживанием высоты полета с точностью до ±6 м, колебаниями стрелки нулевого индикатора около нейтрального положения, колебаниями стрелки указателя общего шага несущего винта и характерным подергиванием вертолета, которое возникает при парировании возмущений автопилотом. Уход стрелки нулевого индикатора к (верхнему или нижнему упору свидетельствует о неправильной балансировке вертолета по мощности (мощность задана больше или меньше необходимой). Если мощность больше необходимой, стрелка ухо-
дит к верхнему упору, если меньше необходимой — к нижнему упору. Следует изменить мощность ручкой общего шага, а затем опять включить канал высоты. Могут быть случаи, когда стрелка подходит к верхнему упору, и вертолет набирает высоту, или когда стрелка подходит к нижнему упору, и вертолет снижается. Это говорит с явно большом избытке или недостатке мощности.
При полетах в условиях сильной болтанки рекомендуется выключить каналы направления и высоты автопилота, чтобы избежать динамических нагрузок на систему управления ввиду резких перемещений исполнительных штоков гидроусилителей. В режиме горизонтального полета, как и при любом другом режиме полета с поступательной скоростью (набор высоты, снижение с работающими двигателями и на режиме авторотации), вертолет Ми-8 может получать перегрузки как от маневров, так и от порывов ветра при полете в неспокойной атмосфере. Максимальная перегрузка в полете может действовать лишь по вертикальной оси У, по которой действует сила тяги винта. Эксплуатационная перегрузка по этой оси определяется по следующей формуле:
Т
У О
Максимальная перегрузка может быть получена при маневрах при полете на экономической скорости, на которой максимальный избыток мощности и достаточно большой запас кинетической энергии. Тяга может быть увеличена путем увеличения угла атаки несущего винта ручкой циклического шага и общего шага несущего винта ручкой «шаг — газ». Величина перегрузки будет зависеть от относительной скорости полета, величины максимального значения коэффициента подъемной силы, плотности воздуха, числа оборотов несущего винта, веса вертолета, и определяется по специальной формуле, которая здесь не приводится. Так, например, при полете на скорости 120 км/ч над уровнем моря у вертолета Ми-8 можно маневром двумя ручками управления получить перегрузку, равную 3.
Обычно максимальная перегрузка от характера криволинейного движения в полетных случаях задается нормами прочности. Для всех вертолетов, в том числе и для вертолета Ми-8, максимальная эксплуатационная перегрузка берется в пределах #тах =2,5—4. Для 1вертолето1в-кранов пэтах ==2,5. Коэффициент безопасности (запас прочности) устанавливается /=1,5. Минимальная перегрузка принимается равной Птт=— 0,5.
Перегрузка при полете в неспокойной атмосфере определяется по следующей формуле: пэ= 1±:Апэ,
где Апэ — приращение перегрузки от порыва вертикального ветра. При порыве вверх знак берется положительный, при порыве вниз — отрицательный.
Приращение перегрузки при полете с поступательной скоростью в неспокойной атмосфере зависит от плотности воздуха, характера изменения коэффициента подъемной силы, от углов атаки лопастей, скорости полета вертолета, скорости вертикального порыва ветра, коэффициента заполнения несущего винта, градиента нарастания скорости порыва, удельной нагрузки на ометаемую площадь и определяется по специальной формуле, которая здесь не приводится. Так, например, при полете на скорости, соответствующей М = 0,15 при вертикальном порыве ветра вверх со скоростью 15 м/с у вертолета Ми-8 возникает перегрузка около 1.9.
Виражи и развороты в горизонтальной плоскости на вертолете Ми-8 выполняются с включенными каналами автопилота (кроме канала направления). Методика выполнения их такая же, как и без автопилота. Выключение канала направления можно осуществлять кнопкой на пульте автопилота или постановкой ног на педали. Выполнение виража или разворота без выключения канала направления приводит к сильному скольжению, ввиду стремления вертолета удержать заданный курс при освобожденных педалях. При выполнении виражей и длительных разворотов с углом крена более 5° при включенном автопилоте для обеспечения стабилизации нужного крена необ-,ходимо крен задавать ручкой центровки крена,установленной на пульте управления автопилота.
При разворотах и виражах несущий и хвостовой винты являются мощными гироскопами. Гироскопические моменты их парируются автопилотом или пилотом соответствующими движениями рычагов управления. Роторы турбин двигателей также являются гироскопами. Их моменты конструктивно не уравновешиваются, кроме того, что подкосы двигателей ставятся на амортизаторах для обеспечения прочности вообще, в том числе и за счет действий гиромоментов.
На вертолете Ми-8, как и на любом другом вертолете и самолете, пилот пользуется следующими скоростями: приборной, индикаторной, истинной воздушной и путевой. Приборная скорость имеет большое практическое значение, так как все летные ограничения по скоростям и пилотирование вертолетом на всех установившихся и переходных режимах полета производятся только по этой скорости1.
Для перехода от приборной скорости к индикаторной у земли необходимо учесть погрешности прибора на неточность его механизмов (инструментальную поправку) и влияние вертолета на неточность восприятия статического давления в ПВД (аэродинамическую поправку):
 1 Без учета маневров у земли и наличия указателя путевой скорости ДИВ-1.
1 Без учета маневров у земли и наличия указателя путевой скорости ДИВ-1.
Для учета инструментальной поправки в кабине пилотов выве^ шивается график, построенный в лаборатории. Аэродинамическая поправка учитывается йо тарировочному графику указателя скорости вертолета Ми-8, полученному при помощи летных испытаний на мерной базе (рис, 59).
Такой график для вертолета Ми-8 приведен и в руководстве по летной эксплуатации. Как видно по графику, погрешность на
| 250 | ||||||
| / | ||||||
| 200 | / | |||||
| / | ||||||
| 150 | / | |||||
| / | ||||||
| 100 | ||||||
| 50 | > | / | ||||
установку ПВД крайне мала: лишь на скоростях ниже 150 км/ч прибор занижает показания скорости на незначительную величину. Индикаторная скорость изменяется в зависимости от высоты ввиду изменения плотности воздуха и числа М, что приводит к изменению сжимаемости воздуха. Поправка индикаторной скорости на. сжимаемость (Уг —
= Угз + 'бУСт)- ПРОИЗВОДИТСЯ ПО
| 0. 50 100 150 '200 Упр, км/ч Рис. 59. Тарировочный график указателя скорости вертолета Ми-8 |
специальным номограммам или по аэронавигационной линейке. Поправка на сжимаемость при давлении ниже 760 мм рт. ст. всегда имеет отрицательное значение. Это значит, что идеальный прибор с подъемом на высоту
показывает завышенную скорость. Для вертолета Ми-8 ввиду малой скорости полета поправка на сжимаемость не производится: тарировочный график на аэродинамическую поправку 1^гз==/(^пр) принимается справедливым для всех высот и температур.
Для перехода от индикаторной скорости к истинной воздушной скорости и наоборот пользуются известной инженерной формулой:
7 V,
 где Д = рц/()о==О,379 Р/Т (относительная плотность воздуха).
где Д = рц/()о==О,379 Р/Т (относительная плотность воздуха).
Практически истинная скорость определяется по крейсерским графикам, аэронавигационной линейке или указывается в руководстве по летной эксплуатации. Для вертолета Ми-8 крейсерские графики не применяются.
Путевая скорость в зависимости от истинной воздушной скорости, скорости и направления ветра определяется решением треугольника скоростей, а практически определяется по аэронавигационной линейке НЛ-10.
§ 2. СХЕМА СИЛ И МОМЕНТОВ, ДЕЙСТВУЮЩИХ НА ВЕРТОЛЕТ
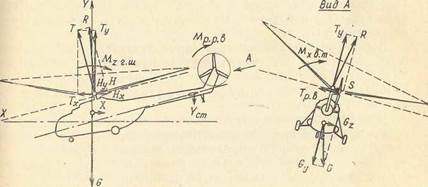
В горизонтальном полете на вертолет действуют следующие силы и моменты (рис. 60): аэродинамическая сила несущего винта #, тяга рулевого (винта Гр<в, вредное сопротивление вертолета X, (вес вертолета О, реактивный момент несущего винта Мр.н.в, путевой момент рулевого винта МуфтВ, продольный момент
|

|
Рис. 60. Схема сил и моментов, действующих на вертолет Ми-8 в горизонтальном полете (балансировка с правым креном)
аэродинамической силы винта (пикирующий), продольный момент стабилизатора, продольный реактивный момент рулевого винта, продольный момент втулки М2.вт, поперечный момент втулки Мос.вт, поперечный момент боковой силы 5 и поперечный момент рулевого винта.
В связанной системе координат аэродинамическая сила несущего винта раскладывается на три составляющие: тягу винта Т, продольную силу Н и боковую силу 5. В скоростной (поточной) системе координат тягу винта можно разложить на Ту — вертикальную составляющую и Тх — горизонтальную составляющую. Сила Ту является подъемной силой, а Тх — тянущей. Продольная сила Н в этой же системе координат раскладывается на Ну и Нх. Тяга рулевого винта в горизонтальном полете всегда направлена влево.
В режиме горизонтального полета, как и при наборе высоты с поступательной скоростью, вертолет Ми-8 может балансироваться или с правым креном за счет действия в эту сторону инерционного момента втулки Мх<вт или с левым скольжением, но без крена (на рис. 60 скольжение не показано). Крен и скольжение по величине будут меньше, чем в режиме набора высоты ввиду меньшей мощности в горизонтальном полете по сравнению с мощностью в наборе высоты. При наличии крена сила веса О в поперечной плоскости раскладывается на составляющие Оу и Ох.
В режиме установившегося горизонтального полета должны быть соблюдены следующие условия равновесия сил и моментов. Для прямолинейного полета в горизонтальной плоскости необходимо, чтобы силы Ту и Ну уравновешивали вес вертолета О: Ту + Ну=О.
Для равномерного полета необходимо, чтобы тянущая сила уравновешивала вредное сопротивление вертолета X и горизонтальную составляющую продольной силы Нх: ТХ=Х + НХ.
Для соблюдения продольного равновесия необходимо, чтобы сумма всех продольных моментов была равна нулю.
Для соблюдения путевого равновесия реактивный момент несущего винта должен быть уравновешен путевым моментом рулевого винта.
Для соблюдения поперечного равновесия без скольжения с правым креном необходимо, чтобы геометрическая сумма поперечных моментов была равна нулю, а тяга рулевого винта уравновешивалась боковой силой 5 и составляющей веса Ох: Гр.в = = 8+0г. Если же вертолет балансируется без крена, а с левым скольжением (на рис. 60 не показано), тогда для поперечной балансировки необходимо, чтобы тяга рулевого винта уравновешивалась боковой силой 5 несущего винта и боковой силой фюзеляжа (З*, (возникающей за счет левого скольжения: ГрВ =
В полете пилот добивается установившегося горизонтального полета и его балансировки, а значит, соблюдения указанных уравнений, действуя всеми рычагами управления, руководствуясь показаниями приборов и положением вертолета относительно естественного горизонта.
|
|
|

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...
© cyberpedia.su 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

