| Режимы работы двигателя
| Температура газа перед турбиной компрессора, °С
| Число оборотов компрессора, %
|
| Взлетный Номинальный Крейсерский
| 880 860 810
| 101 100 98
|
Максимально допустимая замеренная температура газа перед турбиной компрессора на взлетном режиме при работе двигателя на земле должна быть не выше 875° С.
Высотные характеристики двигателя ТВ2-117А. Мощность любого газотурбинного двигателя зависит от температуры и давления окружающей среды. В общем случае при увеличении атмосферного давления мощность увеличивается за счет увеличения расхода воздуха через двигатель за единицу времени, при уменьшении давления — мощность уменьшается. При уве-
личении температуры воздуха мощность двигателя уменьшается, так как уменьшается количество воздуха, проходящего через двигатель за единицу времени. С подъемом на высоту температура воздуха и его давление уменьшаются. Уменьшение температуры приводит к увеличению мощности, а уменьшение давления — к уменьшению. Степень воздействия давления на
| N0,
л. с.
1600
то
1200 1000 800 600 400
|
|
|
|
|
|
| Се,
кгс/лд.1,
0,38 0,36 0,34 0,32 0,30 0,28
|
|
|
|
|
|
| «------.
|
| к'
|
|
|
| -90%
|
|
|
|
| п=98
| А
| -^
96%
| \
|
|
| И
|
|
|
|
|
|
| ~~—■ — —
| —
|
|
|
|
| К
|
|
|
|
| ■95%
| Ч
|
|
|
| п=91
|
|
|
|
|
| %^
| «^
|
|
|
|
|
|
|
|
|
■у
|
|
|
|
|
1 2 3 4/1, км
а) б)
Высотные характеристики двигателя ТВ2-117А в стандартной атмосфере:
а —зависимость мощности на валу свободной турбины от высоты полета и оборотов турбокомпрессора; б —зависимость удельного расхода топлива от высоты полета и числа оборотов турбокомпрессора; А —область взлетных режимов-. Б —область номинальных ре-ж'имов; В —область крейсерских режимов; 1 —ограничение по расходу топлива; 2— ограничение по степени повышения полного давления в компрессоре
уменьшение мощности с подъемом на высоту больше, чем влияние температуры на увеличение мощности, поэтому с увеличением высоты мощность двигателя уменьшается.
Двигатель ТВ2-117А является не высотным, но у него предусмотрены такие законы регулирования и автоматический поворот лопаток входного направляющего аппарата (ВНА) и направляющих аппаратов (НА) первых трех ступеней компрессора, что мощность по высоте уменьшается незначительно, особенно в области номинальных и крейсерских режимов работы двигателя.
На рис. 33 представлены высотные характеристики двигателя ТВ2-117А по мощности и удельному расходу топлива в зависимости от оборотов турбокомпрессора в условиях стандартной •атмосферы (ВСА-64). Если рычаг управления насоса-регулятора НР-40ВР находится в положении, соответствующем максимальной подаче топлива по лимбу, в двигатель поступает такое количество топлива, что он развивает у земли взлетную мощ-
7а
ность, равную 1500 л. с. При этом температура газов перед турбиной компрессора, степень повышения давления на последних ступенях компрессора и обороты турбокомпрессора ниже максимально допустимых (Гг=850°С, л:к = 6,2, АгТк = 98,5%). При подъеме на высоту подача топлива не меняется, степень повышения давления, температура газов и обороты турбокомпрессора увеличиваются, при этом мощность двигателя на валу свободной турбины также увеличивается. При достижении высоты 1400—1500 м обороты компрессора, температура газов перед турбиной и степень повышения давления воздуха могут достичь своих расчетных пределов (7г = 880°, як = 7,2, птк=101%). Мощность двигателя при этом достигает 1530'—1550 л. с. При работе двигателя на взлетном режиме у земли удельный расход топлива Се будет максимальным, с подъемом на высоту будет незначительно уменьшаться, так как часовой расход топлива остается неизменным, а мощность двигателя растет (см. рис. 33,6). При достижении высоты 1400 м вступает в работу ограничитель степени повышения давления воздуха в последних ступенях компрессора, заложенный в насосе-регуляторе НР-40ВР. Происходит уменьшение подачи топлива в двигатель (отсечка), поэтому при дальнейшем наборе высоты (выше 1400 м) степень повышения давления воздуха остается постоянной — 7,2, обороты турбокомпрессора, температура газов и мощность двигателя уменьшаются. При этом удельный расход топлива Се будет оставаться постоянным или незначительно увеличиваться (см. рис. 33,6). Часовой расход топлива уменьшается. На высоте 4000 м мощность двигателя составит около 1150 л. с.
Лопатки входного направляющего аппарата и направляющих аппаратов первых трех ступеней компрессора на взлетном режиме двигателя у земли будут открыты не полностью на максимальный угол (0° по лимбу гидромеханизма), если обороты компрессора будут ниже 100—101%, т. е. ниже тех оборотов, на которые отрегулировано максимальное открытие лопаток. Поэтому с подъемом на высоту, начиная с земли, лопатки направляющих аппаратов будут автоматически открываться на больший угол и на некоторой высоте будут открыты полностью, став на упоры.
Кроме того, положение лопаток направляющих аппаратов зависит от температуры окружающей среды: чем она выше, тем больше лопатки прикрыты, так, что при высоких температурах окружающего воздуха на взлетном режиме двигателя лопатки могут занимать промежуточное положение.
На режимах работы двигателя ниже взлетного при подъеме на высоту все системы ограничения отключаются, работает лишь всережимный регулятор оборотов турбокомпрессора, входящий в систему НР-40ВР. Он поддерживает заданные обороты турбокомпрессора ручкой «шаг — газ» через рычаг топлива НР-40ВР. Регулятор оборотов регулирует подачу топлива
расхода топлива. Чем больше скорость полета летательного аппарата, тем больший прирост мощности будет у двигателя. Так как у вертолетов скорости полета обычно небольшие, то прирост мощности у двигателей за счет скорости незначительный и иногда даже не принимается во внимание. Так, например, если у вертолета Ми-6 прирост мощностей двигателей за счет скорости полета учитывается, то у вертолета Ми-8 учитывается не во всех случаях.
2. Потери мощности двигателей и коэффициент использования
Мощности
Потери мощности. На вертолете Ми-8 существуют следующие постоянные потери эффективной мощности двигателей: на всасывание, на трение, на охлаждение, на приводы агрегатов и на хвостовой винт.
П'отери мощностей двигателей на всасывание происходит за счет определенной компоновки входного устройства двигателей, в результате чего подход воздуха к переднему корпусу компрессора несколько затруднен, образуется завихрение, что влечет потерю эффективной мощности двигателей.
Эти потери составляют 2,5% от эффективной мощности двигателей и от скорости полета вертолета не меняются, т. е. на любом режиме работы двигателей и любой скорости полета теряются 2,5% той мощности, которую выдают двигатели на свободные турбины.
Потери мощности на трение во всей трансмиссии составляют 3,0% от всей эффективной мощности двигателей. В зависимости от скорости полета этот процент не меняется.
Потери на охлаждение, т. е. на вращение вентилятора для охлаждения агрегатов двигательной установки, составляют 1,15% от эффективной мощности двигателей; от скорости полета эти потери также не меняются.
Потери мощности на приводы вертолетных агрегатов составляют 0,8% от эффективной мощности двигателей; от скорости полета эти потери не меняются.
Потери мощности двигателей на хвостовой винт изменяются в зависимости от скорости полета: на висении они составляют 9,55% эффективной мощности, с ростом скорости уменьшаются, и при 1ы, равном 0,3 и больше (при У=240 км/ч и больше), они составляют 6,55%. Уменьшение потери мощности на хвостовой винт с ростом скорости объясняется уменьшением потребной мощности для горизонтального полета вертолета, а значит, и уменьшением реактивного момента несущего винта, а также улучшением условий работы хвостового винта в косой обдувке и роста его тяги до скорости 240 км/ч. Этим и объясняется, что с увеличением скорости полета для сохранения направления пу-
П
ти пилот должен отклонять вперед левую педаль, ставя хвостовой винт на меньший шаг*.
 Коэффициент использования мощности. Все перечисленные потери мощности двигателей на вертолете учитывает коэффициент использования мощности |, который показывает, какая часть эффективной мощности двигателей подана на втулку несущего винта и определяется делением располагаемой мощности несуще- ^ го винта на эффективную 0,86 мощность двигателей: 0№
Коэффициент использования мощности. Все перечисленные потери мощности двигателей на вертолете учитывает коэффициент использования мощности |, который показывает, какая часть эффективной мощности двигателей подана на втулку несущего винта и определяется делением располагаемой мощности несуще- ^ го винта на эффективную 0,86 мощность двигателей: 0№
0,82 0,80
Р.Н.В
| Рис. 34. Изменение коэффициента использования мощности двигателей вертолета Ми-8 в зависимости от скорости полета
|
 Изменение коэффициента использования мощности в зависимости от скорости полета для вертолета Ми-8 показано
Изменение коэффициента использования мощности в зависимости от скорости полета для вертолета Ми-8 показано
на рис. 34. Как видно по рисунку, на (висении этот коэффициент составляет 0,83.
С ростом скорости он увеличивается за счет уменьшения потерь на хвостовой винт и на скорости 240 км/ч и выше будет иметь максимальную (величину 0,86.
Кроме перечисленных постоянных потерь мощности двигателей, существуют еще временные потери при включении системы отбора воздуха за VIII ступенью компрессора для нужд вертолета и при включенной антиобледенительной системе двигателей при отборе горячего воздуха за X ступенью компрессора из полости между кожухом и жаровой трубой камеры сгорания. При включенной системе отбора воздуха за VIII ступенью компрессора мощность каждого двигателя уменьшается на 4%, а удельный расход топлива увеличивается на 3%. При включенной антиобледенительной системе двигателей мощность их уменьшается на 4,5%, а удельный расход топлива увеличивает-ся на 5%.
3. Располагаемая мощность несущего винта
Располагаемой мощностью несущего винта будем называть часть эффективной мощности двигателей, приходящуюся на втулку несущего винта, т. е. мощность двигателей, расходуемую на вращение несущего винта. Численно эта мощность будет определяться вычитанием из эффективной мощности двигателей
·  Здесь указаны расчетные данные. Истинные данные будут приведены гл. IX, § 1 «Балансировка».
Здесь указаны расчетные данные. Истинные данные будут приведены гл. IX, § 1 «Балансировка».
4. Пропульсивный к. п. д. несущего винта
Несущий винт вертолета создает подъемную силу и является одновременно движителем вертолета. Пропульсивные свойства несущего винта принято характеризовать, как и тянущий винт самолета, его коэффициентом полезного действия.
Коэффициент полезного действия несущего винта как движителя определяется как отношение приращения полезной мощности несущего винта как движителя, к приращению мощности, подводимой к несущему винту при переходе от одного к другому режиму полета, например, от режима авторотации к полету с работающими двигателями. Приращение полезной мощности несущего винта как движителя определяется произведением про-пульсивной силы винта на скорость полета вертолета АТХУ, а приращение подводимой мощности можно выразить 75ДЛЛ Тогда к. п. д. несущего винта как движителя получим:
\т т/
■движ
75ЛАГ
Так как при переходе с режима авторотации на режим полета с подведенной мощностью пропульсивная сила винта равна сумме сопротивления его на режиме авторотации Тхс и вредного сопротивления вертолета Хвр, то пропульсивный коэффициент полезного действия несущего винта будет равен:
 или через коэффициенты и относительную скорость:
или через коэффициенты и относительную скорость:
_(*гс —*гвр) М
'движ •
Пропульсивный к. п. д. характеризует потери мощности несущего винта при переходе с режима авторотации на режим работы как движителя. При этом считается, что несущий винт создает подъемную силу как на режиме авторотации, или как крыло самолета, без подвода мощности.
Если бы индуктивные и профильные потери мощности на создание подъемной силы на режиме работы с подведенной мощностью были бы равны их потерям на режиме самовращения несущего винта, тогда пропульсивный к. п. д. был бы равен единице. Но так как эти потери на режимах полета с подведенной мощностью больше, чем на режиме самовращения, к. п. д. несущего винта меньше единицы. Но пропульсивный к. п. д. несущего винта больше, чем к. п. д. тянущего винта, так как разность индуктивных и профильных потерь на режиме полета с подведенной мощностью и на режиме самовращения незначительна и она меньше, чем у тянущего винта самолета.
§ 4. УПРАВЛЕНИЕ ДВИГАТЕЛЯМИ И ВИНТОМ
1. Общие положения
К системам управления двигателями и винтами, как самолетов, так и вертолетов, предъявляются следующие требования:
1. Надежность в работе.
2. Удобство и простота пользования управлением для чле
нов экипажа.
3. Возможность при помощи этих систем устанавливать дви
гателям и винтам работу с максимальным их к. п. д. на всех
режимах полета и тем самым получать от указанных систем
наибольшую экономичность.
Что касается первого требования, то оно выполнено на всех самолетах и вертолетах. Для полного выполнения второго и третьего требований еще необходимо соответствующее внимание со стороны конструкторов, аэродинамиков, испытателей и эксплуатационников.
Для вертолетов с газотурбинными двигателями разработаны три системы управления двигателями и винтами:
— система «шаг ■—газ»;
- система автоматического поддержания постоянных оборотов несущего винта на всех режимах полета вертолета (одноре-жимный регулятор оборотов несущего винта);
— система автоматического поддержания постоянных опти
мальных оборотов несущего винта для данного режима полета
вертолета (многорежимный регулятор оборотов несущего вин
та) К
2. Система «шаг—газ»
Система «шаг — газ» первоначально была установлена на вертолете Ми-6 и применяется до сих пор на всех этих вертолетах выпуска до 1970 г. включительно. Система «шаг — газ» предусмотрена и для вертолета Ми-8 в качестве резервной (аварийной) на случай отказа автоматической системы управления двигателями и винтом.
Принцип управления двигателями и винтом с помощью системы «шаг — газ» заключается в том, что между шагом винта и сектором газа двигателя (для вертолета Ми-8 рычагами управления насосом-регулятором) имеется механическая программная связь (для вертолета Ми-8 система тяг и качалок), обеспечивающая при перемещении ручки общего шага такое одновременное изменение шага винта и режима работы двигателей, при котором обороты несущего винта сохраняются практически по-
 1 Указанные системы управления расположены в порядке их совершенства.
1 Указанные системы управления расположены в порядке их совершенства.
стоянными. Но указанная механическая связь позволяет сохранять постоянное число оборотов несущего винта лишь при определенных условиях: температуре и давлении окружающей среды, полетном весе вертолета, режиме и высоте полета. При других же указанных условиях изменение положения ручки общего шага 2 (рис. 38) приводит к изменению оборотов несущего винта и тогда пилоту необходимо воздействовать корректо-

Рис. 38. Принципиальная схема системы «шаг—газ» у вертолета с газотурбинными двигателями:
/—регулятор числа оборотов турбокомпрессора; 2 —ручка «шаг—газ»; 3 —корректор режима работы турбокомпрессора; 4— механизм связи режима работы двигателей и винта; 5—камера сгорания двигателя; а—сигнал на изменение режима работы двигателей; б—подача топлива в двигатели; в —сигнал на изменение шага винта; г —сигнал на поддержание постоянных оборотов турбокомпрессора; д —сигнал по температуре окружающей среды; е— сигнал по давлению окружающей среды
ром газа 3 для сохранения заданных номинальных оборотов. От корректора газа 3 подается сигнал а на изменение режима работы двигателей, минуя механическую связь шага винта и газа двигателей 4. При этом регулятор оборотов турбокомпрессора 1 изменяет подачу топлива по связи б в двигатели, и число оборотов несущего винта изменяется на нужную величину, т. е. пилот их удерживает постоянными — оптимальными.
Для изменения же режима работы двигателей, нужного для нового режима полета, пилот при помощи ручки общего шага 2 воздействует через программный механизм связи 4 одновременно на шаг винта по связи в и на газ двигателя по связи а и далее через регулятор 1 по связи б. Тогда новое количество топлива— строго дозированное — подается в камеры сгорания двигателей. Двигатели выходят на новый режим работы. При этом располагаемая и потребная мощности для вращения винта уравновешиваются. Если обороты несущего винта будут уходить от заданных, пилот опять при помощи корректора газа удержит их в нужных пределах.
ны быть взлетными и соответствовать графику рис. 30 в зависимости от температуры окружающего воздуха. Обороты несущего винта при этом должны быть 95+2% (см. точку е на рис. 39 и рис. 40,а, б). При дальнейшем движении ручки общего шага вверх обороты турбокомпрессора практически не меняются, а обороты несущего винта уменьшаются. При достижении оборотов несущего винта 92—93% двигатели и несущий винт пе-
90 а)
90 90
б)
95пдг%
Рис. 40. Характеристика системы «шаг—газ» с правой коррекцией на режиме висения вертолета Ми-8:
а —изменение оборотов турбокомпрессоров в зависимости от общего шага несущего винта (р = 716 мм рт. ст., #=120 м, ^=—8° С); б—изменение оборотов несущего винта в зависимости от общего шага несущего винта (р = 760 мм рт. ст., Я=0 м, { = —8° С); в—изменение оборотов несущего винта в зависимости от оборотов турбокомпрессоров (р = 760 мм рт. ст., #=0 м, ^ = —8° С)
решли на взлетный режим (см. табл. 1). При этом общий шаг винта около 10° (см. рис. 40, а, б). На взлетном режиме обороты несущего винта уменьшились по сравнению с оборотами на Других режимах до 92—93% за счет соответствующего затяжеления несущего винта, эти обороты являются оптимальными для взлетного режима — винт развивает максимальную тягу. При дальнейшем движении общего шага показания лимба продолжают увеличиваться и при достижении шага 14° должны быть 90— 105% (точки д, з на рис. 39). При работающих двигателях на режиме висения такое движение ручки общего шага вызывает перетяжеление несущего винта. При этом обороты винта и его тяга будут уменьшаться.
Здесь описана (и представлена на рис. 39 и 40) система «шаг — газ» вертолега Ми-8 при правой коррекции (90°), когда работает автоматическая система поддержания постоянных оптимальных оборотов несущего винта 95+2%, т. е. когда подачей
топлива в двигатели управляет регулятор оборотов несущего винта РО-40ВР. Если при любом шаге несущего винта корректор газа не доводить до крайнего правого положения (за пунктирную линию б, ж рис. 39), то автоматическая система постоянства оборотов несущего винта отключена, и подачей топлива в двигатели управляет пилот при помощи общего шага винта и корректора газа, т. е. управление двигателями и винтом переведено на обычную вертолетную систему «шаг — газ».
На площади, описанной замкнутой кривой а, б, ж, з, и на рис. 39, можно представить величину общего шага по указателю и положение рукоятки корректора газа для установления того или иного режима работы двигателей согласно табл. 1 для совершения того или иного режима полета вертолета на всем диапазоне скоростей и высот по системе «шаг — газ». Специальными летными испытаниями установлено, что наборы высоты с поступательной скоростью на номинальном режиме работы двигателей на наивыгоднейшей скорости набора (120 км) в зависимости от веса и высоты осуществляются при шаге 8—10°, а для удержания оборотов несущего винта в пределах номинальных 93—97% корректор газа должен занимать среднее положение (зона /, рис. 39).
Режимы горизонтального полета совершаются на шаге 6—8° в зависимости от скорости полета, высоты и веса вертолета. При этих режимах для удержания номинальных оборотов несущего винта рукоятка корректора газа также занимает не правое и не левое положение, а среднее или близкое к крайним положениям (зона 2, рис. 39). Снижение с работающими двигателями совершается при шаге 4—6,5° с теми же положениями рукоятки корректора газа (зона 3, рис. 39). Режимы планирования с убранным газом обоих двигателей совершаются на шаге 1—3° при левой коррекции (зона 4, рис. 39).
Следовательно, почти на всех режимах полета для установления номинальных оборотов несущего винта пилоту приходится управлять корректором газа, внимательно следить за оборотами и удерживать их в пределах номинальных, беспрерывно действуя корректором газа. Особенно это характерно для переходных режимов полета.
Система «шаг — газ» полностью удовлетворяет только первому требованию к системам управления, указанным выше (надежная работа), и не полностью удовлетворяет второму и третьему требованиям.
Ввиду недостатков системы «шаг — газ» и была введена для вертолетов с газотурбинными двигателями, в том числе и для вертолета Ми-8, автоматическая система поддержания оптимальных оборотов несущего винта на всех режимах полета вертолета. Система же «шаг — газ» является для вертолета Ми-8 резервной, на случай отказа — автоматической.
3. Автоматическое регулирование постоянства оборотов несущего винта на всех режимах полета вертолета
Эта система включает в себя обычную вертолетную систему «шаг — газ», регулятор оборотов турбокомпрессора и регулятор оборотов свободной турбины (винта). Принцип работы системы заключается в следующем. Пилот может управлять двигателями и винтом при помощи системы «шаг — газ», пользуясь ручкой общего шага 1 (рис. 41) и корректором газа 2. При

Рис. 41. Принципиальная схема автоматического поддержания постоянства оборотов несущего винта на всех режимах полета:
/—ручка общего шага; 2—корректор режима работы турбокомпрессора; 3 —механизм связи режима работы двигателей и винта («шаг—газ»); 4— несущий винт; 5—регулятор оборотов несущего винта; 6— турбина винта; 7—турбина компрессора; 8— камера сгорания двигателя; 9 —дозирующее устройство; 10 —регулятор оборотов турбокомпрессора; а —сигнал на изменение шага винта; б—сигнал на изменение режима работы двигателей; в—сигнал по оборотам винта; г—сигнал на изменение подачи топлива в двигатели от регулятора оборотов несущего винта; д —подача топлива в двигатели; е—сигнал по числу оборотов турбокомпрессора
этом по связи а меняется общий шаг винта, а по связи б и далее по связи д меняется режим работы двигателей.
На установившемся режиме двигателей регулятор оборотов турбокомпрессора 10 поддерживает заданные пилотом обороты по связи е. Обороты же несущего винта в зависимости от условий могут изменяться от оптимальных в сторону увеличения или уменьшения, тогда пилот их удерживает в пределах оптимальных при помощи корректора газа, изменяя соответствующим образом режим работы двигателей по связи б и д через регулятор оборотов турбокомпрессора. При этом для удержания других оборотов несущего винта будут назначены и другие обороты турбокомпрессора. Регулятор оборотов турбокомпрессора 10 опять будет их поддерживать заданными.
На переходных режимах полета, изменяя режим работы двигателей и шаг несущего винта при помощи ручки общего шага, пилот добивается нужных оборотов турбокомпрессора, при этом обороты несущего винта могут выйти за оптимальные и даже за допустимые. Тогда пилот опять будет их удерживать в пределах необходимых, воздействуя на режим работы двигателей корректором газа.
При описанной работе системы «шаг — газ» регулятор оборотов несущего винта 5 не работает. Дозирование топлива для нужного режима работы двигателям осуществлялось на переходных режимах пилотом с помощью ручки общего шага и корректора газа, а на установившихся режимах — регулятором оборотов турбокомпрессора 10. При этом по сигналу е в зависимости от оборотов турбокомпрессора не только происходит поддержание их постоянными, заданными пилотом, но и ограничение максимально допустимого числа оборотов. Система «шаг— газ» должна задавать мощность двигателям, равную потребной для вращения винта на данном шаге, а для этого должна быть строго определенная дозировка топлива, которой пилот и добивается ручкой общего шага и корректором газа. При этом корректор газа не доходит до своего крайнего правого положения, а остается в положении, указанном на рис. 39 влево от пунктирной линии б, ж.
Для того чтобы включить в работу регулятор оборотов несущего винта 5 (рис. 41) на любом данном шаге его, необходимо довести корректор газа в крайнее правое положение, тогда по сигналам б и затем д через регулятор оборотов турбокомпрессора в двигатели начнет поступать большее количество топлива через дозирующее устройство, двигатели перейдут на повышенную мощность, увеличивая обороты турбокомпрессора, а соответственно и несущего винта. Но так как регулятор оборотов несущего винта 5 настроен на оптимальные обороты, а корректором газа они задаются большие, то регулятор оборотов 5 подает сигнал г на уменьшение подачи топлива в двигатели через дозирующее устройство 9. Двигатели уменьшат режим и восстановятся оптимальные обороты несущего винта. Если же обороты несущего винта начнут уменьшаться по какой-либо причине и выйдут из пределов оптимальных, регулятор оборотов несущего винта прекратит подачу сигнала на уменьшение топлива, а так как его подастся больше, чем положено для оптимальных оборотов при помощи корректора газа, то и обороты несущего винта будут стремиться к оптимальным. Следовательно, теперь на установившемся режиме работы двигателей управляет подачей топлива в двигатели не регулятор оборотов турбокомпрессора, а регулятор оборотов несущего винта, изменяя соответствующим образом режим работы двигателей для сохранения оптимальных оборотов несущего винта, заложенных программой.
| Рис. 421. Конструктивная схема регулятора оборотов свободной турбины (винта) РО-40ЕР:
/—-рессора; 2— уплотнитель; 3, 12— пружины; 4— датчик оборотов; 5—шарикоподшипник; 6— жиклер; 7 —клапан; 8 —рычаг; 9 —грузик; 10 —игла; 11 —втулка; 13 —опора; 14 —винт регулировочный; 15 —клапан для стравливания воздуха; Л—слив топлива в НР-40ВР; Б—топливо от НР-40ВР; В —дренаж
|
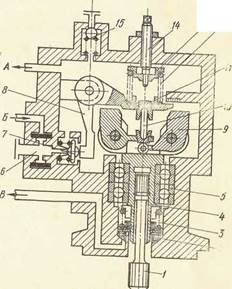 ществлено системой «шаг — газ». При этом центробежные силы грузиков 9, приложенные к оси иглы 10, таковы по величине, что они не могут преодолеть силу пружины 12. Рычаг 8 запирает плоским клапаном 7 выход топливу через жиклер 6 по каналу Б из полости между жиклером и дроссельным пакетом регулятора оборотов компрессора насоса-регулятора НР-40ВР. В этом случае регулятор оборотов РО-40ВР отключен от топливной системы двигателя и не работает. При указанном положении корректора газа мощность двигателей такова, что она не дает развить несущему винту обороты оптимальные, установленные регулировочным винтом 14. На установившемся режиме работы двигателей регулятор оборотов ротора компрессора удерживает заданные обороты компрессора ручкой общего шага и корректора газа независимо от высоты полета и температуры окружающего воздуха. И если режим работы двигателей ниже взлетного, то мощность их с подъемом на высоту или с увеличением температуры уменьшается, и наоборот. Обороты несущего винта при этом могут изменяться при помощи корректора газа или
ществлено системой «шаг — газ». При этом центробежные силы грузиков 9, приложенные к оси иглы 10, таковы по величине, что они не могут преодолеть силу пружины 12. Рычаг 8 запирает плоским клапаном 7 выход топливу через жиклер 6 по каналу Б из полости между жиклером и дроссельным пакетом регулятора оборотов компрессора насоса-регулятора НР-40ВР. В этом случае регулятор оборотов РО-40ВР отключен от топливной системы двигателя и не работает. При указанном положении корректора газа мощность двигателей такова, что она не дает развить несущему винту обороты оптимальные, установленные регулировочным винтом 14. На установившемся режиме работы двигателей регулятор оборотов ротора компрессора удерживает заданные обороты компрессора ручкой общего шага и корректора газа независимо от высоты полета и температуры окружающего воздуха. И если режим работы двигателей ниже взлетного, то мощность их с подъемом на высоту или с увеличением температуры уменьшается, и наоборот. Обороты несущего винта при этом могут изменяться при помощи корректора газа или
в зависимости от облегчения или затяжеления винта по условию полета.
Если корректор газа перевести в крайнее правое положение при любом шаге винта, то мощность двигателей будет больше потребной мощности для вращения несущего винта на данном шаге, при этом обороты компрессоров и несущего винта будут увеличены, и когда обороты несущего винта станут больше оптимальных, установленных регулировочным винтом 14, центробежные силы грузиков 9 увеличатся, игла 10 поднимется вверх, преодолевая силу натяжения пружины 12, рычаг 8 повернется, и клапан 7 откроет отверстие канала Б, через жиклер ко-
торого топливо из иолости между жиклером и дроссельным пакетом всережимного регулятора оборотов турбокомпрессора будет перетекать на слив через канал А и далее через систему слива насоса-регулятора НР-40ВР. Это вызовет понижение давления в указанной полости, произойдет перемещение дозирующей иглы агрегата НР-40ВР в сторону уменьшения подачи топлива в двигатели, что приведет к снижению оборотов роторов турбокомпрессоров и предотвратит раскрутку ротора свободной турбины (несущего винта). Обороты будут соответствовать заданным регулировочным винтом 14. Теперь подачей топлива в двигатели через дозирующую иглу, а значит, и мощно-стью двигателей и их оборотами будет управлять регулятор оборотов несущего винта РО-40ВР.
Если обороты несущего винта увеличатся выше заданных самостоятельно по условию полета, слив топлива через жиклер 6 увеличится, подача топлива в двигатели через дозирующую иглу уменьшится, обороты турбокомпрессора уменьшатся, мощность, передаваемая на винт, тоже уменьшится и опять предот-вратится раскрутка винта.
Если обороты несущего винта самостоятельно уменьшатся В1виду затяжеления винта по условию полета, слив топлива через жиклер 6 уменьшится или прекратится совсем, будет подан сигнал дозирующей игле на увеличение количества топлива в двигатели, компрессоры разовьют обороты, несущий винт получит большую мощность и дальнейшее падение его оборотов прекратится. При этом обороты турбокомпрессора увеличатся, но не более, чем это задано правой коррекцией при данном шаге, они будут меньше взлетных, если общий шаг винта будет меньше 10°.
Управление двигателями и несущим винтом теперь будет осуществляться только ручкой общего шага, но при правой коррекции на всех режимах работы двигателей во время полета. При движении ручки общего шага вверх общий шаг винта будет увеличен, рычаг управления насоса-регулятора НР-40ВР повернется на большую подачу топлива в двигатели, двигатели разовьют большие обороты, свободная турбина получит большую мощность, но обороты ее не увеличатся, так как регулятор РО-40ВР будет их поддерживать заданными на всех режимах работы двигателей и полета вертолета (почему регулятор и получил название «однорежимный»). Если ручку общего шага опустить вниз, то все процессы будут протекать аналогично описанным, но в обратном порядке в сторону уменьшения мощности. Обороты несущего винта будут заданы регулировкой винта /4РО-40ВР.
Нельзя понимать так, что если в работу по управлению дозированием топлива при правой коррекции вступил регулятор оборотов несущего винта РО-40ВР, то всережимный регулятор оборотов ротора компрессора прекратит свою работу. Напротив, если регулятор оборотов РО-40ВР уменьшил обороты
турбокомпрессоров для уменьшения оборото/в винта, то вслед за этим всережимный регулятор оборотов турбокомпрессора будет стремиться их опять увеличить до тех, которые заданы общим шагом и правой коррекцией, а они заданы больше, чем требуется для удержания заданных оборотов несущему винту. Следо;вательно, оба регулятора оборотов работают совместно, стремясь удержать обороты несущего винта, заданные регулировкой, т. е. всережимный регулятор оборотов компрессоров стремится обороты винта увеличить выше нормы, а регулятор РО-40ВР не допускает их выше нормы.
У двигателя ТВ2-117А предусмотрены также автоматические ограничения для обеспечения прочности всех деталей двигателя по величине максимальной мощности (расходу топлива), по •степени повышения давления в последних ступенях компрессора, по максимальным оборотам турбокомпрессора и по температуре газов перед турбиной компрессора.
У вертолета Ми-8 на всех установившихся режимах полета (висение, набор высоты с поступательной скоростью, горизонтальный полет, снижение по наклонной траектории с работающими двигателями) и на всех высотах при включенной автома: тической системе поддержания постоянных оборотов несущего винта (правой коррекции) обороты несущего винта поддерживаются постоянными (оптимальными) в пределах 95+2% по указателю. На неустановившихся режимах полета (взлет, посадка, развороты, торможение скорости, разгон скорости, полет в неспокойной атмосфере) обороты несущего винта будут самостоятельно изменяться в сторону уменьшения или увеличения от указанных выше ввиду затяжеления или облегчения несущего винта при действии ручкой общего шага или другими рычагами управления, а также действием воздушных масс воздуха на несущий винт. При этом автоматическая система не успевает удержать обороты несущего винта, установленные регулировкой (95+2%). Установлены ограничения по оборотам несущего винта: они должны быть не менее 89% и не более 103% кратковременно не более 30 с. На режиме малого газа допускаются максимальные обороты несущего винта до 105% в течение не более 5 с.
На режиме авторотации обороты несущего винта поддерживаются ручкой общего шага приблизительно в тех же пределах, что и при полете с работающими двигателями.
Максимальные обороты несущего винта ограничены по условию прочности несущего винта и свободной турбины, а также и по флаттеру и сжимаемости, а минимальные—по срыву потока с концов лопастей в азимуте 270° и по ухудшению управляемости. На взлетном режиме работы двигателей независимо от режима полета вертолета (вертикальный или с поступательной скоростью) оптимальными оборотами несущего винта являются
92—93% по указателю. Достигаются эти обороты соответствующим затяжелением несущего винта, и поэтому, несмотря на работу регулятора РО-40ВР, они не могут увеличиться до 95± ±2%. Это вызвано тем, что двигатели работают на взлетном режиме, а винт поставлен на соответствующий шаг (на висении около 10°, а на режимах с поступательной скоростью больше 10°).
При выполнении вынужденных и тренировочных посадок с коротким пробегом с одним и двумя неработающими двигателями на малой высоте, у земли, непосредственно перед приземлением, за счет полного затяжеления несущего винта до максимального шага обороты несущего винта могут доходить до 70%.
У вертолета Ми-8 управление двигателями и винтом на всех режимах полета, в том числе и на земле, фактически осуществляется системой «шаг — газ» вместе с автоматической системой поддержания постоянных оборотов несущего винта. Эта система обеспечивает л











