Если на экране РЛС наблюдаются эхосигналы нескольких опасных судов, то для наблюдения
и решения задачи на маневренном планшете рекомендуется выбирать не более трех. Для
уменьшения погрешностей необходимо первоначально установить очередность выполнения
измерений и производить их в одной и той же последовательности через установленный
промежуток времени.
Дальнейший порядок решения задачи будет следующим.
1. Снимают отсчеты пеленгов и расстояний до выбранных эхо сигналов объектов,
записывают их в таблицу обработки радиолокационной информации (ем.табл.4), наносят на планшет и помечают цифрой «нуль» и большой буквой А, В,..., С (см.рис.).
2. Выполняют вспомогательные графические построения как для одного судна;
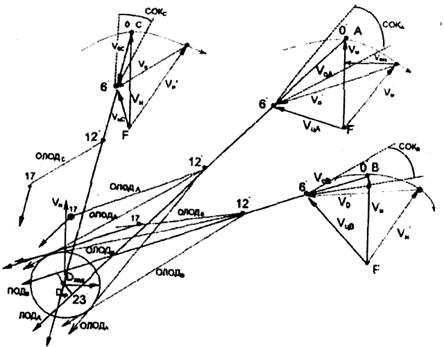
Рис.21. Решение задачи расхождения с тремя судами.
q из центра планшета проводят вектор VH;
q при центре планшета проводят окружность радиуса Dзад.;
q направляют вектор VH в нулевую точку и помечают его начало буквой F (Fixed), что
означает положение точки неизменной при маневрировании собственного судна, в
предположении, что опасное сохраняет постоянными курс и скорость;
q проводят часть окружности своей скоростью в районе нулевой точки, вправо и влево от нее, эта вспомогательная дуга позволяет существенно ускорить графическое решение задачи расхождения с несколькими опасными судами.
3. Снимают отсчеты пеленгов и расстояний тех же отметок, соблюдая первоначально
выбранную последовательность, записывают в таблицу и наносят на планшет, помечая цифрой
6.
4. Соединяют нулевые и 6-ти минутные точки всех судов и получают векторы
относительного перемещения V0, направленные стрелкой в 6-ю минуту. Продолжают их до
центра планшета и получают ЛОДА, ЛОДВ и ЛОДс Опускают перпендикуляры на ЛОДЫ и снимают
значения Dкр., а затем графически соответствующим вектором V0 от нулевой точки по ЛОДа„ до
основания перпендикуляра определяют время кратчайшего сближения tкp, а полученные
значения Dкр. и tкp записывают в таблицу обработки радиолокационной информации. Наносят
упрежденную точку (рекомендуется на 12-ой минуте, с учетом набора информации за 6 минут,
решения задачи 3 мин. и выполнения эффективного маневра по расхождению за 3 мин.) и
проводят из нее касательные к окружности радиуса Dзад. Их рекомендуется проводить
штриховой линией для того, чтобы было видно перемещение отметок после выполнения
маневра для расхождения, и получают ОЛОДЫ.
5. Из 6-ой минуты проводят линии параллельные ОЛОДам в противоположном направлении и
получают секторы опасных курсов (СОКА, СОКВ, СОКС). Целью решения задачи расхождения
является необходимость вывести концы векторов VНА, VHB и VHC за.пределы СОК. По взаимному
расположению судов относительного собственного, наличия акватории для маневрирования и с
учетом требований правил МППСС-72 определяют лимитирующее судно и выбирают
эффективный маневр для расхождения. Для выбора маневра предварительно производят
краткую характеристику каждого судна и записывают ее в таблицу (табл.3). Там же
рекомендуется обвести кружочками выбранные значения Dзад. и tзад. В данном случае выбран
маневр отворота вправо на угол 35°. Лимитирующим является судно В.
Таблица 3.
| Суда: А - Пересекает курс по носу
справа.
В - Мы пересекаем курс, ЛОД
проходит по корме.
С - Опасное судно, скорость меньше
нашей. К....................................................
| |
Маневр
12-я минута: изменение курса вправо 35°.
17-я минута: прежний
режим движения.
.................................................
| Dзад.=
0.5, 1.0,
1.5, 2.0 миль
| |
............................................
|
tзад= 6, 12 мин.
|
|
| Кн°
| vh,УЗ
| A Dкp= 4 кбт.
tкр.= 23 мин.
| В Dкp= 3 кбт.
tкр = 25 мин.
| С DKP=0
tкр =27 мин.
| K DKP=………………………..
tкр =……………………………
|
| п,°
| D,
миль
| п,°
| D, миль
| п,°
| D, миль
| П,°
| D, миль
|
|
| 360°
| 20
| 45
| 9.1
| 60
| 7.9
| 12
| 6.0
|
|
|
|
| 360°
| 20
| 45
| 7.2
| 59
| 6.5
| 12
| 5.0
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| | | | | | | | | | | | |
6. Из упрежденной точки проводят штриховую линию, параллельную вектору V0 по
направлению стрелки и получают ОЛОДВ,. Прикладывают параллельную линейку к ЛОДв,
проводят касательную к окружности Dзад до пересечения с ОЛОДв и получают точку возвра-
щения к первоначальным параметрам движения собственного судна. Графически, новым
значением вектора относительного перемещения V0, от 12-ти минутной точки определяют время
возвращения (в нашем случае это 17-я минута) и записывают его значение в таблицу. Снимают
значение пеленга и расстояния до лимитирующего судна в момент возвращения к
первоначальным параметрам и записывают их в таблицу. Однако необходимо отметить, что
упрежденная точка и возвращения к первоначальным параметрам являются приближенными
(ориентировочными), с запасом в безопасную сторону, поэтому необходимо вести тщательный
контроль процесса расхождения.
7. Поворачивают вектор VH у судов А и С вправо на тот же угол 35°, проводят их ОЛОДЫ и на
них графически наносят положение на 17-ой минуте новым значением векторов относительного
перемещения от 12-ой минуты (см. рис.22). От указанных точек проводят линии параллельные
первоначальным ЛОД со стрелками, помечая дальнейшее перемещение эхо-сигналов объектов.
Основной особенностью решения задачи расхождения с несколькими судами является
необходимость выбора одного маневра для всех опасных, а также возвращение к
первоначальным параметрам по лимитирующему судну. В приведенном примере рассмотрено
одношаговое решение задачи, только маневром отворота вправо.
Для документирования процесса расхождения и подтверждения назначения допустимых
величин Dзад и tзад. их значение рекомендуется обвести кружочком в верхней части таблицы (см.
табл. 4, 5).
Рассмотрим порядок решения задачи при ситуации, когда справа на траверзе имеется
отметка объекта и отворот вправо не рекомендуется (см. рис.22).
В этом случае принимается принципиальное решение по маневрированию - сначала
уменьшают скорость не менее чем на половину (вплоть до минимального хода, достаточного для
удержания судна на курсе), а затем пропустив судно справа, отворачивают вправо с
восстановлением скорости до первоначально выбранного безопасного ее значения. Для того,
чтобы не затенять рисунок, подробное построение вспомогательных линий выполнено только
для судна В, для остальных производят аналогично. Соответствующие записи в таблице
обработки, о характере перемещения судов и маневры собственного приведены в табл. 4.
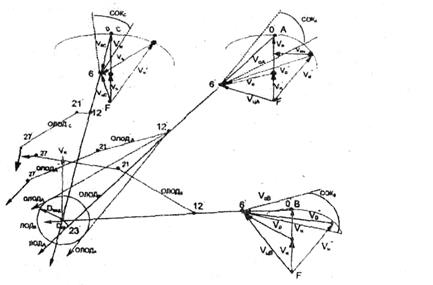
Рис.22. Решение задачи расхождения с двумя судами.
Таблица 4. Обработка радиолокационной информации.
| Суда: А - Пересекает курс по носу
справа
|
МАНЕВР
в
р
| 12-я минута: изменение курса
| Dзад.= мин.
|
| До 0.4 Vy
|
| В -Опасное судно справа
| 21-я минута: отворот вправо
| 0.5, 1.0
|
| С - Опасное судно, скорость
меньше нашей
миль
| 27-я минута: восстановлен
начальный режим
……………………………………………………
.............................
|
1.5, 2.0миль мимил
|
|
К.................................................
|
tзад= 6, 12
|
|
|
|
|
| Кн°
| vh,УЗ
| A Dкp= 4 кбт.
tкр.= 23 мин.
| В Dкp= 3 кбт.
tкр = 25 мин.
| С DKP=0
tкр =27 мин.
| K DKP=…………………
tкр =………………………
|
| п,°
| D,
миль
| п,°
| D, миль
| п,°
| D, миль
| П,°
| D, миль
|
|
| 360°
| 20
| 45
| 9.1
| 90
| 7.9
| 12
| 6.0
|
|
|
|
| 360°
| 20
| 45
| 7.2
| 90
| 6:5
| 12
| 5.0
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| | | | | | | | | | | | | | |
Порядок построений при этом будет до момента проведения секторов опасных курсов
аналогичен, как и при одношаговом решении задачи. Поскольку при анализе ситуации на
планшете стало очевидно (см. рис. 22), что отворачивать вправо нельзя из-за судна справа на
траверзе, то необходимо уменьшать скорость. Дальнейший ход решения задачи следующий.
1. уменьшают скорость до значения 0.4Vн и помечают вектор V’н для каждого судна и
соединяют его конец с 6-ти минутной точкой, направляя стрелку в 6-ю минуту, получают новое
значение вектора относительного перемещения V0, которое будет различным для каждого судна.
2. Определяют, что лимитирующим будет судно В. Ориентируясь по нему очевидно, что на 21-ой минуте его ЛОД будет на достаточном расстоянии по носу собственного судна. Поэтому на 21 поворачивают вправо на 35° и увеличивают скорость до первоначально выбранной безопасной, получают вектор Vн". Наносят на ОЛОДВ положение судна В на 21-ой минуте.
3. Из конца Vн" в 6-ю минуту проводят новое значение вектора V0",из 21-ой минуты проводят
линию параллельную V0" по направлению стрелки и получают ОЛОДв. Из анализа ситуации
видно, что возвращаться к первоначальным параметрам можно на 27-ой минуте, Наносят ее на
ОЛОДв, помечают цифрой 27 и проводят сплошную линию параллельную первоначальному ЛОДв
со стрелкой, указывающей направление дальнейшего перемещения эхо-сигнала объекта.
4. Аналогично выполняют построение для судов А и С и проверяют перемещение отметок с
таким расчетом, чтобы они не зашли в область недопустимых значений Dкр. Решение задачи
можно считать законченным, когда нанесено положение всех отметок на планшете на момент
возвращения к первоначальным параметрам движения собственного судна.